S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Workbench Users GuideDocument272 paginiWorkbench Users GuidejemanuelvÎncă nu există evaluări
- ANSYS Fluent V2F Turbulence Model ManualDocument100 paginiANSYS Fluent V2F Turbulence Model ManualjemanuelvÎncă nu există evaluări
- Ansys Cfx-Pre Users GuideDocument380 paginiAnsys Cfx-Pre Users GuidejemanuelvÎncă nu există evaluări
- EzyStrut Seismic Solutions Brochure2Document4 paginiEzyStrut Seismic Solutions Brochure2jemanuelvÎncă nu există evaluări
- ANSYS Fluent V2F Turbulence Model ManualDocument100 paginiANSYS Fluent V2F Turbulence Model ManualjemanuelvÎncă nu există evaluări
- ANSYS EKM Administration GuideDocument308 paginiANSYS EKM Administration GuidejemanuelvÎncă nu există evaluări
- Using Remote Display Technologies With ANSYS Workbench ProductsDocument326 paginiUsing Remote Display Technologies With ANSYS Workbench ProductsjemanuelvÎncă nu există evaluări
- ANSYS EKM Administration GuideDocument308 paginiANSYS EKM Administration GuidejemanuelvÎncă nu există evaluări
- Workbench Users Guide PDFDocument342 paginiWorkbench Users Guide PDFjemanuelvÎncă nu există evaluări
- FE Modeler Users GuideDocument184 paginiFE Modeler Users GuidejemanuelvÎncă nu există evaluări
- Workbench Users Guide PDFDocument342 paginiWorkbench Users Guide PDFjemanuelvÎncă nu există evaluări
- Ansys Ekm Users GuideDocument620 paginiAnsys Ekm Users GuidejemanuelvÎncă nu există evaluări
- Combining Spatial Components in Seismic DesignDocument11 paginiCombining Spatial Components in Seismic DesignjemanuelvÎncă nu există evaluări
- Design, Construction and Control of A Novel Tower CraneDocument5 paginiDesign, Construction and Control of A Novel Tower CranejemanuelvÎncă nu există evaluări
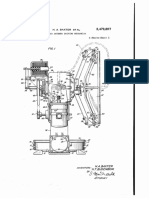
- 5,2? % Mail: Aug. 23, 1949, H - A, Baxter Etal 2,47%,897Document7 pagini5,2? % Mail: Aug. 23, 1949, H - A, Baxter Etal 2,47%,897jemanuelvÎncă nu există evaluări
- US2443515 Sheet Metal Cabinet ConstructionDocument8 paginiUS2443515 Sheet Metal Cabinet Constructionjemanuelv100% (1)
- Load, Force and Power-Velocity Relationships in The Prone Pull-Up ExerciseDocument23 paginiLoad, Force and Power-Velocity Relationships in The Prone Pull-Up ExercisejemanuelvÎncă nu există evaluări
- United States Patent: Fiigel US 6,840,540 B2Document12 paginiUnited States Patent: Fiigel US 6,840,540 B2jemanuelvÎncă nu există evaluări
- La Progettazione MeccatronicaDocument12 paginiLa Progettazione MeccatronicaNational Instruments ItalyÎncă nu există evaluări
- Tata Technologies Annual Report 2021 WebDocument226 paginiTata Technologies Annual Report 2021 Webvijay kumarÎncă nu există evaluări
- Chapter 8 - Test BankDocument50 paginiChapter 8 - Test Bankjuan100% (1)
- Cag 99Document25 paginiCag 99Valentina ScarabinoÎncă nu există evaluări
- PV Cell ModelingDocument12 paginiPV Cell Modelingtran duyÎncă nu există evaluări
- Fanuc 0i-F CNC CatalogDocument16 paginiFanuc 0i-F CNC CatalogJenkho CGÎncă nu există evaluări
- Assessment Matrix For SIT SIR BSBDocument251 paginiAssessment Matrix For SIT SIR BSBDave CurbyÎncă nu există evaluări
- (Understanding Complex Systems) Hassan Qudrat-Ullah, J. Michael Spector, Paal Davidsen-Complex Decision Making - Theory and Practice-Springer (2010)Document332 pagini(Understanding Complex Systems) Hassan Qudrat-Ullah, J. Michael Spector, Paal Davidsen-Complex Decision Making - Theory and Practice-Springer (2010)Rus Simina GabrielaÎncă nu există evaluări
- Tibebu Hunegn Birhane - Blast Analysis of Railway Masonry BridgesDocument134 paginiTibebu Hunegn Birhane - Blast Analysis of Railway Masonry BridgesFraosmÎncă nu există evaluări
- Determination of Model Parameters For The HardeninDocument15 paginiDetermination of Model Parameters For The HardeninAhmed RamadanÎncă nu există evaluări
- Commodity Chain AnalysisDocument22 paginiCommodity Chain AnalysisajjumamilÎncă nu există evaluări
- AFW369E 2016-17 Courseoutline HooyCWDocument5 paginiAFW369E 2016-17 Courseoutline HooyCWwilliamnyxÎncă nu există evaluări
- ChemCAD and ConcepSys AIChE Spring 09Document28 paginiChemCAD and ConcepSys AIChE Spring 09ConcepSys Solutions LLCÎncă nu există evaluări
- Battery Energy Storage System Size Determination 2018 Renewable and SustainaDocument17 paginiBattery Energy Storage System Size Determination 2018 Renewable and Sustainazillur RahmanÎncă nu există evaluări
- The Lab GuideDocument26 paginiThe Lab GuideUmisadidaÎncă nu există evaluări
- P663 (Blasingame) PA (v20130722) PDFDocument280 paginiP663 (Blasingame) PA (v20130722) PDFDDÎncă nu există evaluări
- Silabus Kurikulum TSPDocument41 paginiSilabus Kurikulum TSPHendra AntomyÎncă nu există evaluări
- Compressor Piping SystemDocument11 paginiCompressor Piping SystemmusaveerÎncă nu există evaluări
- Original PDF Introduction To Management Science 13th Edition PDFDocument41 paginiOriginal PDF Introduction To Management Science 13th Edition PDFpearl.zinn592100% (38)
- BA 424 Chapter 1 NotesDocument6 paginiBA 424 Chapter 1 Notesel jiÎncă nu există evaluări
- Weick - 1989 - Theory Construction As Disciplined ImaginationDocument17 paginiWeick - 1989 - Theory Construction As Disciplined ImaginationCristian MundacaÎncă nu există evaluări
- Getting Started With SimicsDocument77 paginiGetting Started With Simicsprathap13Încă nu există evaluări
- A Review of EROEI-dynamics Energy-Transition Models (Rye, 2018)Document13 paginiA Review of EROEI-dynamics Energy-Transition Models (Rye, 2018)CliffhangerÎncă nu există evaluări
- Virtual Design of Advanced Control Algorithms ForDocument18 paginiVirtual Design of Advanced Control Algorithms ForTuan AnhÎncă nu există evaluări
- Numerical Modeling and Optimization of Reed Valve For Reciprocating CompressorsDocument5 paginiNumerical Modeling and Optimization of Reed Valve For Reciprocating CompressorsÁrpád VeressÎncă nu există evaluări
- Polymer BrochureDocument3 paginiPolymer BrochureAntariksh VishwakarmaÎncă nu există evaluări
- Brochure M.TechDocument10 paginiBrochure M.TechVamsikrishna NekkantiÎncă nu există evaluări
- Medc Autord Directory 2007Document114 paginiMedc Autord Directory 2007Yogaditya ModukuriÎncă nu există evaluări
- Assignment 01Document8 paginiAssignment 01Mahmood Ul HasnainÎncă nu există evaluări
- Simulated Consultancy Project: Doon Business School, DehradunDocument15 paginiSimulated Consultancy Project: Doon Business School, DehradunUpadhayayAnkurÎncă nu există evaluări