S-ar putea să vă placă și
- Ul 157 BulletinDocument12 paginiUl 157 BulletinciscoÎncă nu există evaluări
- Tek 03-10a PDFDocument4 paginiTek 03-10a PDFciscoÎncă nu există evaluări
- Ncma Tek: Glossary of Concrete Masonry Terms TEK 1-4Document6 paginiNcma Tek: Glossary of Concrete Masonry Terms TEK 1-4Heriberto Yau BÎncă nu există evaluări
- Experimental & Analytical Evaluation of Base Isolated Water Tank StructureDocument73 paginiExperimental & Analytical Evaluation of Base Isolated Water Tank StructureciscoÎncă nu există evaluări
- Base Isolation Design For Civil Components and Civil StructuresDocument45 paginiBase Isolation Design For Civil Components and Civil StructuresciscoÎncă nu există evaluări
- Effects of The Vertical Component and Frequency Content of Ground Motions On The Seismic Response of Above Ground Tanks PDFDocument22 paginiEffects of The Vertical Component and Frequency Content of Ground Motions On The Seismic Response of Above Ground Tanks PDFciscoÎncă nu există evaluări
- Experimental and Analytical Studies of Fixed-Base and Seismically Isolated Liquid Storage Tanks PDFDocument12 paginiExperimental and Analytical Studies of Fixed-Base and Seismically Isolated Liquid Storage Tanks PDFciscoÎncă nu există evaluări
- Tek 04-01a PDFDocument4 paginiTek 04-01a PDFciscoÎncă nu există evaluări
- استاندارد 2800 زلزله ویرایش چهارمDocument237 paginiاستاندارد 2800 زلزله ویرایش چهارمciscoÎncă nu există evaluări
- MAURER Premium Seismic Isolation With Spherical Sliding Isolators For Buildings and Tank StructuresDocument16 paginiMAURER Premium Seismic Isolation With Spherical Sliding Isolators For Buildings and Tank StructuresciscoÎncă nu există evaluări
- Computation 05 00017 v2Document12 paginiComputation 05 00017 v2sitheeqÎncă nu există evaluări
- Base Isolation Design For Civil Components PDFDocument11 paginiBase Isolation Design For Civil Components PDFDavid Gaines100% (1)
- Response of Base-Isolated Liquid Storage Tanks PDFDocument14 paginiResponse of Base-Isolated Liquid Storage Tanks PDFciscoÎncă nu există evaluări
- Cbi LNG Storage US Rev8 LoresDocument4 paginiCbi LNG Storage US Rev8 LoresVilas AndhaleÎncă nu există evaluări
- Experimental Investigation On The Seismic Response of A Steel Liquid Storage Tank Equipped With Floating Roof by Shaking Table TestsDocument20 paginiExperimental Investigation On The Seismic Response of A Steel Liquid Storage Tank Equipped With Floating Roof by Shaking Table TestsciscoÎncă nu există evaluări
- Seismic Design of LNG Storage TanksDocument2 paginiSeismic Design of LNG Storage Tankscisco100% (1)
- Base Isolated LNG Tanks Seismic Analyses and Comparison StudiesDocument10 paginiBase Isolated LNG Tanks Seismic Analyses and Comparison StudiesciscoÎncă nu există evaluări
- Effect of The Foundation Stiffness On The Response of A Seismically Isolated Tank Under SSE ConditionsDocument10 paginiEffect of The Foundation Stiffness On The Response of A Seismically Isolated Tank Under SSE ConditionsciscoÎncă nu există evaluări
- Seismic Response of Elevated Liquid Storage Steel Tanks Isolated by VCFPS at Top of Tower Under Near-Fault Ground MotionsDocument6 paginiSeismic Response of Elevated Liquid Storage Steel Tanks Isolated by VCFPS at Top of Tower Under Near-Fault Ground MotionsciscoÎncă nu există evaluări
- SE50 EEE Butenweg Et AlDocument8 paginiSE50 EEE Butenweg Et AlEdu MariñoÎncă nu există evaluări
- Effect of Base Isolation On Seismic Fragility of Aboveground LNG Storage TanksDocument6 paginiEffect of Base Isolation On Seismic Fragility of Aboveground LNG Storage TanksciscoÎncă nu există evaluări
- Seismic Response of Elevated Liquid Storage Steel Tank With Triple Friction Pendulum System at Base of Tower Under Near - Fault Ground MotionDocument6 paginiSeismic Response of Elevated Liquid Storage Steel Tank With Triple Friction Pendulum System at Base of Tower Under Near - Fault Ground MotionciscoÎncă nu există evaluări
- Seismic Response of Base Isolated Liquid Storage Tanks Under Near Fault Ground MotionsDocument10 paginiSeismic Response of Base Isolated Liquid Storage Tanks Under Near Fault Ground MotionsciscoÎncă nu există evaluări
- 223 STD Seismic Resistant Industrial Tanks SilosDocument74 pagini223 STD Seismic Resistant Industrial Tanks Silossea_jazzÎncă nu există evaluări
- Variable Friction Pendulum System For Seismic Isolation of Liquid Storage TanksDocument12 paginiVariable Friction Pendulum System For Seismic Isolation of Liquid Storage TanksciscoÎncă nu există evaluări
- Seismic Upgrade: Tanks & Storage FacilitiesDocument1 paginăSeismic Upgrade: Tanks & Storage FacilitiesciscoÎncă nu există evaluări
- Simple Procedure For Seismic Analysis of Liquid Storage TanksDocument5 paginiSimple Procedure For Seismic Analysis of Liquid Storage Tankscisco100% (1)
- Stability Analysis of Cylindrical Tanks Under Static and Earthquake LoadingDocument8 paginiStability Analysis of Cylindrical Tanks Under Static and Earthquake LoadingciscoÎncă nu există evaluări
- Uncertainty Quantification and Seismic Fragility of Base-Isolated Liquid Storage TanksDocument14 paginiUncertainty Quantification and Seismic Fragility of Base-Isolated Liquid Storage TanksciscoÎncă nu există evaluări
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5782)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (72)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Hanse Dental en Web PDFDocument16 paginiHanse Dental en Web PDFSophia ZimmermannÎncă nu există evaluări
- Caesar AdvancedDocument5 paginiCaesar AdvancedUrMil SoniÎncă nu există evaluări
- Endress-Hauser Deltabar M PMD55 enDocument9 paginiEndress-Hauser Deltabar M PMD55 encristi_nc2upgÎncă nu există evaluări
- Vapor-Pressure OriginalDocument5 paginiVapor-Pressure Originalapi-293306937Încă nu există evaluări
- Coaching Plan Sub. Code & Name: AE6403 AIRCRAFT STRUCTURES - I Sem: Staff Name: Department: DayDocument3 paginiCoaching Plan Sub. Code & Name: AE6403 AIRCRAFT STRUCTURES - I Sem: Staff Name: Department: DayPradharsan ChelvanayagamÎncă nu există evaluări
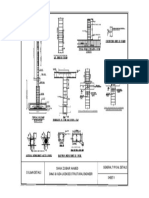
- Lapping and splicing details for reinforced concrete columnsDocument1 paginăLapping and splicing details for reinforced concrete columnsVinod Masani100% (1)
- Thermodynamics Lab 1Document8 paginiThermodynamics Lab 1Amin AliasÎncă nu există evaluări
- Sample Problems On WavesDocument22 paginiSample Problems On WavesbananacrunchÎncă nu există evaluări
- 10th MG Cup 2022 Physics English ProblemsDocument12 pagini10th MG Cup 2022 Physics English Problemsmilos9444Încă nu există evaluări
- Ideal GasDocument60 paginiIdeal Gas68zrvtr9bfÎncă nu există evaluări
- General Brochure - Johnson ControlsDocument4 paginiGeneral Brochure - Johnson Controlst_i_f_anoÎncă nu există evaluări
- 01 High Expansion Foam SystemsDocument4 pagini01 High Expansion Foam SystemsDenys Castañeda TerrazosÎncă nu există evaluări
- Absorption Refrigerator - WikipediaDocument5 paginiAbsorption Refrigerator - Wikipediaaravind grandhiÎncă nu există evaluări
- Shell Momentum Balances for Pipe and Annular FlowDocument15 paginiShell Momentum Balances for Pipe and Annular FlowPatricia de LeonÎncă nu există evaluări
- Arrangement of ParticlesDocument26 paginiArrangement of ParticlesJannz RiveraÎncă nu există evaluări
- Bmat Physics Formula SheetDocument2 paginiBmat Physics Formula SheetsrinivasÎncă nu există evaluări
- HANDRAILDocument3 paginiHANDRAILGaneshalingam Ramprasanna2Încă nu există evaluări
- Continuous Distillation Lab ExperimentDocument3 paginiContinuous Distillation Lab ExperimentHusna Hafiza Bt. R.AzamiÎncă nu există evaluări
- Solution Chapter 2 Dynamic Systems Modeling Simulation and Control KlueverDocument33 paginiSolution Chapter 2 Dynamic Systems Modeling Simulation and Control KlueverWillians Fernando de OliveiraÎncă nu există evaluări
- Adiabatik Prosess Ok 2020Document15 paginiAdiabatik Prosess Ok 2020Pemri Yangrit SaeÎncă nu există evaluări
- Conjugation Part 1Document32 paginiConjugation Part 1Syed Ali100% (1)
- Assignment 2 BLT AE19B102Document34 paginiAssignment 2 BLT AE19B102Anuj NigamÎncă nu există evaluări
- CHEM 381-Introduction To Chemical Engeneering-Salman Ahmad PDFDocument2 paginiCHEM 381-Introduction To Chemical Engeneering-Salman Ahmad PDFHashmi AshmalÎncă nu există evaluări
- Chapter 1 Part 2Document26 paginiChapter 1 Part 2Mustafa OmerÎncă nu există evaluări
- Capacidades de Modelamiento No Lineal de ETABSDocument36 paginiCapacidades de Modelamiento No Lineal de ETABSAsherdafth WatshdÎncă nu există evaluări
- 12th SyllabusDocument3 pagini12th Syllabuspravin mundeÎncă nu există evaluări
- Light Properties and Interactions in 40Document3 paginiLight Properties and Interactions in 40Rhonoelle Reevenujlah100% (1)
- Wire Rs For LNG ElseDocument2 paginiWire Rs For LNG ElserajabalaÎncă nu există evaluări
- Bearing Failure Analysis-V2Document9 paginiBearing Failure Analysis-V2Anonymous omGSHUEQÎncă nu există evaluări
- Beams and ReactionsDocument42 paginiBeams and ReactionsbackuponecolosoÎncă nu există evaluări