S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Aspen Shell & Tube Exchanger Study Guide: Exam Prep For UsersDocument6 paginiAspen Shell & Tube Exchanger Study Guide: Exam Prep For UsersMiguelÁngelHernándezOsorioÎncă nu există evaluări
- Diserio 1995Document7 paginiDiserio 1995MiguelÁngelHernándezOsorioÎncă nu există evaluări
- Santacesaria1992 PDFDocument6 paginiSantacesaria1992 PDFMiguelÁngelHernándezOsorioÎncă nu există evaluări
- Santacesaria1992 PDFDocument6 paginiSantacesaria1992 PDFMiguelÁngelHernándezOsorioÎncă nu există evaluări
- Acs Iecr 7b04181Document10 paginiAcs Iecr 7b04181MiguelÁngelHernándezOsorioÎncă nu există evaluări
- Producion de HidrogenoDocument16 paginiProducion de HidrogenoMiguelÁngelHernándezOsorioÎncă nu există evaluări
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- RN Error CodesDocument16 paginiRN Error CodesPulse Data50% (2)
- Sintef Oil and Gas PDFDocument20 paginiSintef Oil and Gas PDFIoana SpireaÎncă nu există evaluări
- Bituminous Sheets For Roofing and Waterproofing: EN 13707 EN 13969 EN 13970 EN 534 EN 14964Document44 paginiBituminous Sheets For Roofing and Waterproofing: EN 13707 EN 13969 EN 13970 EN 534 EN 14964calimoshÎncă nu există evaluări
- Composite Building Case Study PDFDocument49 paginiComposite Building Case Study PDFkoglad100% (1)
- Operations and Supply Chain Management B PDFDocument15 paginiOperations and Supply Chain Management B PDFAnonymous sMqylHÎncă nu există evaluări
- List of Construction Prices For Electrical Works Philippines - PHILCON PRICESDocument4 paginiList of Construction Prices For Electrical Works Philippines - PHILCON PRICESGueanne Consolacion100% (1)
- Hydril 513™Document4 paginiHydril 513™renatoÎncă nu există evaluări
- Green Island Reclamation Feasibility Study: Sept Mber 1994Document34 paginiGreen Island Reclamation Feasibility Study: Sept Mber 1994JacobPadilla100% (1)
- ICDocument2 paginiICsengottaiyanÎncă nu există evaluări
- Windpods BrochureDocument8 paginiWindpods BrochurelhotapÎncă nu există evaluări
- Norsok: Protective Earth 'Pe' Protective Earth 'Pe' SCR BK BU BK BUDocument1 paginăNorsok: Protective Earth 'Pe' Protective Earth 'Pe' SCR BK BU BK BUtxagusÎncă nu există evaluări
- Managing Resources: Resources Can Be Easily Divided Into Two Sections: Renewable and Non-Renewable. TheseDocument7 paginiManaging Resources: Resources Can Be Easily Divided Into Two Sections: Renewable and Non-Renewable. Theseapi-25904890Încă nu există evaluări
- Palladian and Baroque: The Difference BetweenDocument2 paginiPalladian and Baroque: The Difference BetweenCandace AguilarÎncă nu există evaluări
- La Cimbali Q10-Technical Manual-Eng PDFDocument48 paginiLa Cimbali Q10-Technical Manual-Eng PDFAldryn Adato71% (7)
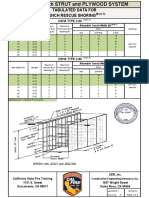
- Shoring With Strut and PlywoodDocument13 paginiShoring With Strut and Plywoodlance lancelottiÎncă nu există evaluări
- Eye/Face Washes G1774: Guardian EquipmentDocument2 paginiEye/Face Washes G1774: Guardian Equipmenteisenbarger5607Încă nu există evaluări
- All Specifiers CheckedDocument698 paginiAll Specifiers CheckedroyalbrahmanÎncă nu există evaluări
- BOS Ex Presentation Jorgen AkessonDocument57 paginiBOS Ex Presentation Jorgen AkessonsourcÎncă nu există evaluări
- En500-600 ManualDocument284 paginiEn500-600 ManualMladen Muskinja100% (1)
- Daily Waste Monitoring FormDocument2 paginiDaily Waste Monitoring FormelcycabotajeÎncă nu există evaluări
- LC 2132 Liberty Walking Half Dollar ChecklistDocument1 paginăLC 2132 Liberty Walking Half Dollar Checklistulfheidner9103Încă nu există evaluări
- Bremen ManualDocument120 paginiBremen Manual4ddy23100% (1)
- Roof FansDocument14 paginiRoof FansCapserVÎncă nu există evaluări
- Godrej Washing MachineDocument17 paginiGodrej Washing MachineDevendra GuptaÎncă nu există evaluări
- Experion Scada PDFDocument2 paginiExperion Scada PDFLaceyÎncă nu există evaluări
- X-Ray Equipment Maintenance and Repairs Workbook: For Radiographers & Radiological TechnologistsDocument6 paginiX-Ray Equipment Maintenance and Repairs Workbook: For Radiographers & Radiological TechnologistsAaronMaroonFiveÎncă nu există evaluări
- Insulating The High Voltage ConnectionsDocument6 paginiInsulating The High Voltage ConnectionsKo Phyo Wai100% (1)
- Mega Parts Book - Vol 2Document102 paginiMega Parts Book - Vol 2Mohamed Cheikh100% (1)
- Guardian Pro Floodlight Data SheetDocument2 paginiGuardian Pro Floodlight Data SheetEugenioÎncă nu există evaluări
- 5 Saud It ChecklistDocument5 pagini5 Saud It Checklistclara_cahuaÎncă nu există evaluări