S-ar putea să vă placă și
- CE363 Lab Book Eng Prop of Soils Bowles PDFDocument249 paginiCE363 Lab Book Eng Prop of Soils Bowles PDFFurkan YılmazÎncă nu există evaluări
- A-level Maths Revision: Cheeky Revision ShortcutsDe la EverandA-level Maths Revision: Cheeky Revision ShortcutsEvaluare: 3.5 din 5 stele3.5/5 (8)
- DC Motor Speed Control PID Implementation Simulink PDFDocument12 paginiDC Motor Speed Control PID Implementation Simulink PDFvince kafuaÎncă nu există evaluări
- SEISMOLOGY, Lecture 2Document38 paginiSEISMOLOGY, Lecture 2Singgih Satrio WibowoÎncă nu există evaluări
- Course Material (Students)Document46 paginiCourse Material (Students)Lamjed AouaniÎncă nu există evaluări
- Selected Exercises From Susskind's General Relativity (TTM4)Document14 paginiSelected Exercises From Susskind's General Relativity (TTM4)Pier Franco NaliÎncă nu există evaluări
- Stress Transformation and Circular Beam Under Combined LoadingDocument11 paginiStress Transformation and Circular Beam Under Combined Loadingkostas.sierros9374Încă nu există evaluări
- Math IA HLDocument15 paginiMath IA HLDev ShahÎncă nu există evaluări
- TIH 025-030 Bearing HeatermanualDocument106 paginiTIH 025-030 Bearing HeatermanualcoupercouperÎncă nu există evaluări
- Mathematical Analysis 1: theory and solved exercisesDe la EverandMathematical Analysis 1: theory and solved exercisesEvaluare: 5 din 5 stele5/5 (1)
- PSCAD Course Notes-V4-Double-SidedDocument127 paginiPSCAD Course Notes-V4-Double-Sidedsandeep kumar mishra100% (2)
- MEng6302 Lecture 7 Torsion of Non-Circular Sections ASM 2021Document42 paginiMEng6302 Lecture 7 Torsion of Non-Circular Sections ASM 2021KKDhÎncă nu există evaluări
- Lecture 27 Intro Slipline Field TheoryDocument14 paginiLecture 27 Intro Slipline Field TheoryprasannaÎncă nu există evaluări
- Lecture 07: Stress Transformation and Equilibrium Equations: Dept. of Mechanical Engg., NIT CalicutDocument11 paginiLecture 07: Stress Transformation and Equilibrium Equations: Dept. of Mechanical Engg., NIT CalicutManoj MallickÎncă nu există evaluări
- Understanding Unsymmetrical BendingDocument20 paginiUnderstanding Unsymmetrical Bendingbiranchi100% (1)
- Sri Lanka Institute of Information Technology Faculty of EngineeringDocument8 paginiSri Lanka Institute of Information Technology Faculty of EngineeringAfrath RuzaikÎncă nu există evaluări
- CE 240 Soil Mechanics & Foundations: Stresses in A Soil Mass I (Das, Ch. 9)Document27 paginiCE 240 Soil Mechanics & Foundations: Stresses in A Soil Mass I (Das, Ch. 9)jorge.jimenezÎncă nu există evaluări
- Chapter 7Document36 paginiChapter 7ajayÎncă nu există evaluări
- Tarea 1 - Cristóbal Ponce SDocument18 paginiTarea 1 - Cristóbal Ponce STomás Ignacio Herrera MuñozÎncă nu există evaluări
- Transformation of Stresses at A PointDocument16 paginiTransformation of Stresses at A Pointgelfeto gebreÎncă nu există evaluări
- Mohr's Circle Analysis for Structural StressesDocument28 paginiMohr's Circle Analysis for Structural StressesManuelDarioFranciscoÎncă nu există evaluări
- Coupled Oscillator Normal ModesDocument8 paginiCoupled Oscillator Normal ModesAbhinav SrivastavaÎncă nu există evaluări
- StressDocument25 paginiStressHoac Chu KenÎncă nu există evaluări
- Nitish Structure1Document19 paginiNitish Structure1vishu1112Încă nu există evaluări
- 5-Lesson Airfoil TheoryDocument46 pagini5-Lesson Airfoil TheoryBruno PereirasÎncă nu există evaluări
- 12 Jeans EquationsDocument23 pagini12 Jeans EquationsSam PicassoÎncă nu există evaluări
- Material Laws Relating Stress and Strain: AboveDocument3 paginiMaterial Laws Relating Stress and Strain: AboveRashÎncă nu există evaluări
- Topic 9 - Strain Gauge and Strain Gauge RosettesDocument7 paginiTopic 9 - Strain Gauge and Strain Gauge RosettesdurakcimÎncă nu există evaluări
- Exercicio 04 - Aula 04Document28 paginiExercicio 04 - Aula 04Luís FelipeÎncă nu există evaluări
- Module 5 Torsion of Non Circular BarsDocument19 paginiModule 5 Torsion of Non Circular BarsEngr Aizaz AhmadÎncă nu există evaluări
- Notes Prepared by (01) Kıvanç Arslan: y X, Z FDocument4 paginiNotes Prepared by (01) Kıvanç Arslan: y X, Z FanÎncă nu există evaluări
- Lecture Note 1. Introduction To Elasticity Equations: Chris Weinberger and Wei CaiDocument18 paginiLecture Note 1. Introduction To Elasticity Equations: Chris Weinberger and Wei CaiRabia ÖzyiğitÎncă nu există evaluări
- General Tensors I Transformation of CoordinatesDocument14 paginiGeneral Tensors I Transformation of CoordinatesABCSDFGÎncă nu există evaluări
- Sample Questions For The Engineering Module: Subtest "Formalising Technical Interrelationships"Document18 paginiSample Questions For The Engineering Module: Subtest "Formalising Technical Interrelationships"Phương LanÎncă nu există evaluări
- Trigonometric Functions: by Daria EiteneerDocument15 paginiTrigonometric Functions: by Daria EiteneerAnderson AlfredÎncă nu există evaluări
- CEng-6501 ToE (Chapter-6)Document8 paginiCEng-6501 ToE (Chapter-6)Fowzi MohammedÎncă nu există evaluări
- 000 ADocument11 pagini000 ADahiana PeñuelaÎncă nu există evaluări
- FE Formulation of Transient Elasticity ProblemsDocument31 paginiFE Formulation of Transient Elasticity ProblemsstrawberrypieÎncă nu există evaluări
- Mec Sol 15Document30 paginiMec Sol 15Vinícius GonçalvesÎncă nu există evaluări
- Notes On The Linear Analysis of Thin-Walled BeamsDocument76 paginiNotes On The Linear Analysis of Thin-Walled BeamsPasc Oana JianinaÎncă nu există evaluări
- Flexural Torsional BucklingDocument3 paginiFlexural Torsional BucklingpraveennagarajanÎncă nu există evaluări
- Tutorial 7 SolDocument8 paginiTutorial 7 Solyadavtstsy07Încă nu există evaluări
- Chapter 4Document75 paginiChapter 4mystic_sage_1791Încă nu există evaluări
- A e 3610 Beam BendingDocument10 paginiA e 3610 Beam BendingRizwan ShadÎncă nu există evaluări
- Plane Stress TransformationDocument14 paginiPlane Stress Transformationirfan shabbbirÎncă nu există evaluări
- Examples of Change of Basis and Matrix Transformations. Quadratic FormsDocument12 paginiExamples of Change of Basis and Matrix Transformations. Quadratic FormsAnonymous 9q5GEfm8IÎncă nu există evaluări
- ISOMETRIC PROJECTIONS - 38 CHARACTERSDocument20 paginiISOMETRIC PROJECTIONS - 38 CHARACTERSdcsindhiÎncă nu există evaluări
- Lecture Date: 04.11.2009 Prepared By:: (01) Anas Abdulrahim (02) Engin UstaDocument9 paginiLecture Date: 04.11.2009 Prepared By:: (01) Anas Abdulrahim (02) Engin Ustasibel demirÎncă nu există evaluări
- 2017 W-Curves in Lorentz-Minkowski SpaceDocument13 pagini2017 W-Curves in Lorentz-Minkowski SpaceEmre ÖztürkÎncă nu există evaluări
- Torsion: 7.1 Overview of The TheoryDocument18 paginiTorsion: 7.1 Overview of The TheoryJuan SilvaÎncă nu există evaluări
- ME 569 Stress and Strain RelationshipsDocument52 paginiME 569 Stress and Strain RelationshipsعلىالمهندسÎncă nu există evaluări
- 2-D Formulation: Plane Theory of ElasticityDocument17 pagini2-D Formulation: Plane Theory of ElasticityDobromir DinevÎncă nu există evaluări
- UNIT CIRCLE and Graph of Trigonometric FunctionsDocument4 paginiUNIT CIRCLE and Graph of Trigonometric Functionshacker johnÎncă nu există evaluări
- Bending Stress BeamDocument29 paginiBending Stress Beamdevansh SriÎncă nu există evaluări
- Torsion of Prismatic BarDocument6 paginiTorsion of Prismatic BarPramod Sharma PÎncă nu există evaluări
- Tracing of Curves PDFDocument54 paginiTracing of Curves PDFGundappa SwamyÎncă nu există evaluări
- St. Venant's Torsion Theory: Circular Cross Section Stress AnalysisDocument12 paginiSt. Venant's Torsion Theory: Circular Cross Section Stress AnalysisAJA14Încă nu există evaluări
- St. Venant's Torsion Theory: AssumptionsDocument12 paginiSt. Venant's Torsion Theory: Assumptionsjohncruz32Încă nu există evaluări
- Formulation of Limit Analysis in OptumDocument9 paginiFormulation of Limit Analysis in Optuma_mohamedenÎncă nu există evaluări
- Beam Reactions and FBDDocument7 paginiBeam Reactions and FBDMaría Alejandra Velásquez PÎncă nu există evaluări
- Stress Tensor Strain Tensor UGDocument39 paginiStress Tensor Strain Tensor UGpritishÎncă nu există evaluări
- FEM MATLAB Code For Linear and Nonlinear Bending Analysis of PlatesDocument20 paginiFEM MATLAB Code For Linear and Nonlinear Bending Analysis of Platesshambel kipÎncă nu există evaluări
- Practice 2Document16 paginiPractice 2Subham meenaÎncă nu există evaluări
- Assignment 5Document2 paginiAssignment 5Subham meenaÎncă nu există evaluări
- 3Eksv7L8BosildPLOdK84G1zZk6Ew1co6BVp8hm0LThwxw9APH9HOx8 PDFDocument3 pagini3Eksv7L8BosildPLOdK84G1zZk6Ew1co6BVp8hm0LThwxw9APH9HOx8 PDFMoneycontrol NewsÎncă nu există evaluări
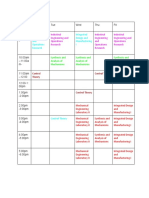
- Time TableDocument1 paginăTime TableSubham meenaÎncă nu există evaluări
- Time Table PDFDocument1 paginăTime Table PDFSubham meenaÎncă nu există evaluări
- Part 01 Theory (253 - 273)Document24 paginiPart 01 Theory (253 - 273)Piyush SinghÎncă nu există evaluări
- How ignition systems create sparks to light fuelDocument25 paginiHow ignition systems create sparks to light fuelNuno CunhaÎncă nu există evaluări
- Tides and Tidal Currents ExplainedDocument22 paginiTides and Tidal Currents ExplainedLouie VerginoÎncă nu există evaluări
- Egg Drop Background InformationDocument3 paginiEgg Drop Background Informationapi-449009025Încă nu există evaluări
- Dynamic Model For Stiff String Torque and DragDocument16 paginiDynamic Model For Stiff String Torque and DragMOHAMED ALi IBRAHIM HASSANÎncă nu există evaluări
- Physics 30: Lesson 24 on Energy, Work and PowerDocument12 paginiPhysics 30: Lesson 24 on Energy, Work and Poweri5piritiÎncă nu există evaluări
- Block Stacking ProblemDocument10 paginiBlock Stacking ProblemZoob100% (1)
- SIP PhysicsDocument8 paginiSIP PhysicsPrincess Joy SamoragaÎncă nu există evaluări
- Measurement Systems For Electrical Machine Monitoring: Mario Vrazic, Ivan Gasparac and Marinko KovacicDocument19 paginiMeasurement Systems For Electrical Machine Monitoring: Mario Vrazic, Ivan Gasparac and Marinko Kovacicpredic1Încă nu există evaluări
- Design Edge-Coupled Microwave Band-Pass FilterDocument8 paginiDesign Edge-Coupled Microwave Band-Pass FilterRabbia SalmanÎncă nu există evaluări
- Equipotential Surfaces and CapacitorsDocument6 paginiEquipotential Surfaces and CapacitorsMoid Aretaño MesaÎncă nu există evaluări
- pss1 Mechanics10Document8 paginipss1 Mechanics10Alejandro Garcia PerezÎncă nu există evaluări
- Cubic block force calculations inclined planeDocument14 paginiCubic block force calculations inclined planevenkateswaranÎncă nu există evaluări
- L200 Regulator CircuitDocument7 paginiL200 Regulator CircuitHenrique Albornoz MilianiÎncă nu există evaluări
- Engineering A Solution To The Problem of Dry-Band Arcing On ADSS CablesDocument27 paginiEngineering A Solution To The Problem of Dry-Band Arcing On ADSS Cablesrjk941-1Încă nu există evaluări
- Hall Effect PDFDocument26 paginiHall Effect PDFmangsureshÎncă nu există evaluări
- Negative and Zero Sequence Directional RelaysDocument17 paginiNegative and Zero Sequence Directional RelaysSubhadeep PaladhiÎncă nu există evaluări
- Wuhan Rising Electric Co., Ltd.Document5 paginiWuhan Rising Electric Co., Ltd.VitalyÎncă nu există evaluări
- China Transformer Testing Lab Review: Past, Present & Future TestingDocument6 paginiChina Transformer Testing Lab Review: Past, Present & Future TestingemilioaraÎncă nu există evaluări
- Int. J. Multiphase Flow Vol. 12, No. 5, Pp. 745-758, 1986Document14 paginiInt. J. Multiphase Flow Vol. 12, No. 5, Pp. 745-758, 1986rockyÎncă nu există evaluări
- Oiml Bulletin Oct 1998Document95 paginiOiml Bulletin Oct 1998libijahansÎncă nu există evaluări
- Milestone Test Practice by Lavish SirDocument15 paginiMilestone Test Practice by Lavish Sirprakashsinghsatya448Încă nu există evaluări
- Newton's Three Laws of Motion: Lesson OutlineDocument10 paginiNewton's Three Laws of Motion: Lesson OutlineGlenn ClementeÎncă nu există evaluări
- Electric Charges and FieldsDocument14 paginiElectric Charges and FieldsRanjit ReddyÎncă nu există evaluări
- Homework 1Document2 paginiHomework 1Freddy Valdez GarciaÎncă nu există evaluări
- Document of Prepaid Energy Meter Using GSMDocument1 paginăDocument of Prepaid Energy Meter Using GSMeshwarp sysargusÎncă nu există evaluări