S-ar putea să vă placă și
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- India S 501 1000 CompaniesDocument38 paginiIndia S 501 1000 Companiespaul_costasÎncă nu există evaluări
- Lightning Protection SystemDocument6 paginiLightning Protection SystemNickÎncă nu există evaluări
- TPM Concept and Literature Review PDFDocument110 paginiTPM Concept and Literature Review PDFheru984100% (4)
- Aluminum Can Production: Step 1 - Bauxite MiningDocument27 paginiAluminum Can Production: Step 1 - Bauxite MiningMalik Nazim ChannarÎncă nu există evaluări
- I. Introduction and Overview II. Unit PlanDocument51 paginiI. Introduction and Overview II. Unit PlanKing4RealÎncă nu există evaluări
- Cemex HBR Case AnalysisDocument3 paginiCemex HBR Case Analysisnikhilsharma550% (4)
- C20 Extraction of MetalsDocument31 paginiC20 Extraction of MetalsKris DookharanÎncă nu există evaluări
- Process DesignDocument21 paginiProcess DesignSisieÎncă nu există evaluări
- Standard Operating ProcedureDocument23 paginiStandard Operating Procedurezhangj5Încă nu există evaluări
- Incinerator SOP-TemplateDocument5 paginiIncinerator SOP-TemplateIr Complicated100% (1)
- Melamine ProcessDocument18 paginiMelamine Processlinda pierre100% (1)
- Modbus Address Map ZR160A2 Gen. 1 (APF206214)Document10 paginiModbus Address Map ZR160A2 Gen. 1 (APF206214)hectorpazos100% (2)
- Tourism in A NationDocument3 paginiTourism in A NationzsoieÎncă nu există evaluări
- 100 Yer PM PPM 0777Document25 pagini100 Yer PM PPM 0777Janakiraman MalligaÎncă nu există evaluări
- PRIMAceiling Seamless - CatalogueDocument2 paginiPRIMAceiling Seamless - CatalogueNabill AshrafÎncă nu există evaluări
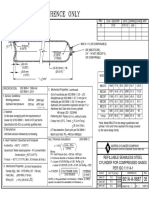
- Refillable Seamless Steel Cylinder For Compressed Gases PER ISO 11114-1Document1 paginăRefillable Seamless Steel Cylinder For Compressed Gases PER ISO 11114-1bkprodhÎncă nu există evaluări
- 5.material Handling System Design and DecisionDocument19 pagini5.material Handling System Design and DecisionSaranya SathiyamoorthyÎncă nu există evaluări
- BS - EN - 1371-1 - 1997 - DP TestDocument30 paginiBS - EN - 1371-1 - 1997 - DP TestHarish JanardhananÎncă nu există evaluări
- Sustainable Development of Total Quality Management Through Deming S Pdsa CycleDocument39 paginiSustainable Development of Total Quality Management Through Deming S Pdsa CycleNaeem KhanÎncă nu există evaluări
- Session 1 - Introduction To Apparel ManufacturingDocument7 paginiSession 1 - Introduction To Apparel ManufacturingPuja PrasadÎncă nu există evaluări
- Improving APQP Process For Effective Program Execution: Dele AwofalaDocument31 paginiImproving APQP Process For Effective Program Execution: Dele AwofalaSelvaraj SÎncă nu există evaluări
- Benefits of Proportional Diverting Gates or Swivel Gates in Kiln Preheater (4 TH Stage To Kiln Inlet)Document9 paginiBenefits of Proportional Diverting Gates or Swivel Gates in Kiln Preheater (4 TH Stage To Kiln Inlet)MuhammadÎncă nu există evaluări
- Plated Through Hole Soldering: Materials by Lindsay CraigDocument22 paginiPlated Through Hole Soldering: Materials by Lindsay Craigamalia dyashintaÎncă nu există evaluări
- Nitoseal MS600Document3 paginiNitoseal MS600Balasubramanian AnanthÎncă nu există evaluări
- LarsLap Model CDocument4 paginiLarsLap Model CanhkietvtÎncă nu există evaluări
- HempShive PresentationDocument11 paginiHempShive PresentationNabeelAhmedÎncă nu există evaluări
- Arvedi First Thin Slab Endless CastingDocument10 paginiArvedi First Thin Slab Endless CastingprasenjitsayantanÎncă nu există evaluări
- Manual Gra Vitac Nie NGDocument38 paginiManual Gra Vitac Nie NGkumbrovÎncă nu există evaluări
- Victor-Reinz Agri MWMDocument3 paginiVictor-Reinz Agri MWMAugustine DharmarajÎncă nu există evaluări