S-ar putea să vă placă și
- Ley Del Deporte Educacin Fsica y Recreacin 11 de Agosto de 20101Document26 paginiLey Del Deporte Educacin Fsica y Recreacin 11 de Agosto de 20101Misael AntonioÎncă nu există evaluări
- C6 Representacion ProcesosDocument48 paginiC6 Representacion ProcesosDavid EcheverryÎncă nu există evaluări
- ImpDocument2 paginiImpnerioalfonsoÎncă nu există evaluări
- Ducto de Gases 3Document1 paginăDucto de Gases 3nerioalfonsoÎncă nu există evaluări
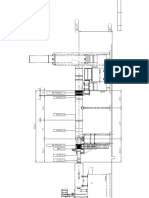
- Area Existente: Planta de Losa N. +10.35Document1 paginăArea Existente: Planta de Losa N. +10.35nerioalfonsoÎncă nu există evaluări
- Cavitacion-Solucion A Sus Necesidades de BombeoDocument2 paginiCavitacion-Solucion A Sus Necesidades de BombeoJorge Santos RomeroÎncă nu există evaluări
- S 0305 Medici On Caudal 1Document29 paginiS 0305 Medici On Caudal 1Postillo Espinoza MessiasÎncă nu există evaluări
- Ducto de Gases 1Document1 paginăDucto de Gases 1nerioalfonsoÎncă nu există evaluări
- MingaDocument95 paginiMinganerioalfonsoÎncă nu există evaluări
- Vista Aero EnfriadoresDocument1 paginăVista Aero EnfriadoresnerioalfonsoÎncă nu există evaluări
- Ducto de Gases 2Document1 paginăDucto de Gases 2nerioalfonsoÎncă nu există evaluări
- Gato - Hoja1Document1 paginăGato - Hoja1nerioalfonsoÎncă nu există evaluări
- MAteriales Skid BlendingDocument1 paginăMAteriales Skid BlendingnerioalfonsoÎncă nu există evaluări
- Proyectos Con ChimneasDocument5 paginiProyectos Con ChimneasnerioalfonsoÎncă nu există evaluări
- Area Existente: Planta de Losa N. +15.55Document1 paginăArea Existente: Planta de Losa N. +15.55nerioalfonsoÎncă nu există evaluări
- Petroecuador: Emitido paraDocument1 paginăPetroecuador: Emitido paranerioalfonsoÎncă nu există evaluări
- Tipicos de Construccion SercoELDocument17 paginiTipicos de Construccion SercoELnerioalfonsoÎncă nu există evaluări
- Herramientas para Construcción de TanquesDocument7 paginiHerramientas para Construcción de TanquesnerioalfonsoÎncă nu există evaluări
- 30 FrasesDocument1 pagină30 FrasesnerioalfonsoÎncă nu există evaluări
- Formulario 13 Metodologia de Construccion TermogasDocument1 paginăFormulario 13 Metodologia de Construccion TermogasnerioalfonsoÎncă nu există evaluări
- Caso Sprint - Analisis.Document1 paginăCaso Sprint - Analisis.nerioalfonsoÎncă nu există evaluări
- Especificaciones TecnicasDocument143 paginiEspecificaciones TecnicasnerioalfonsoÎncă nu există evaluări
- Transport AdoresDocument4 paginiTransport AdoresPaolaÎncă nu există evaluări
- Petroecuador: Emitido paraDocument1 paginăPetroecuador: Emitido paranerioalfonsoÎncă nu există evaluări
- El Terreno Mecanica de Suelos - Matilde González UPCDocument308 paginiEl Terreno Mecanica de Suelos - Matilde González UPCjulian_andres51100% (5)
- Petroecuador: Emitido paraDocument1 paginăPetroecuador: Emitido paranerioalfonsoÎncă nu există evaluări
- Proyectos Con ChimneasDocument5 paginiProyectos Con ChimneasnerioalfonsoÎncă nu există evaluări
- Aislamiento PDFDocument8 paginiAislamiento PDFJose RamonÎncă nu există evaluări
- Userdefinedline-6"-H1A3: PetroecuadorDocument1 paginăUserdefinedline-6"-H1A3: PetroecuadornerioalfonsoÎncă nu există evaluări
- Tabla de especificaciones de tubería de acero al carbono ASTM A53/A106 con diámetros de 1/2 a 6Document3 paginiTabla de especificaciones de tubería de acero al carbono ASTM A53/A106 con diámetros de 1/2 a 6reblas100% (6)
- Curriculum Vitae Modelo3b Verde WordDocument2 paginiCurriculum Vitae Modelo3b Verde WordcarlosÎncă nu există evaluări
- Formato Mantenimiento PCDocument9 paginiFormato Mantenimiento PCAlberto GuidoÎncă nu există evaluări
- Software Comercial 1-pDocument7 paginiSoftware Comercial 1-pHector RuizÎncă nu există evaluări
- Casos EspecialesDocument44 paginiCasos EspecialesFrancisco GonzalezÎncă nu există evaluări
- Filtros Econometricos en AdtDocument39 paginiFiltros Econometricos en AdtAnonymous 80AZibuhBHÎncă nu există evaluări
- Ejercicios ArquitecturaDocument53 paginiEjercicios ArquitecturaJose Ramon Sandoval JimenezÎncă nu există evaluări
- Diagnostico Necesidades de AprendizajeDocument5 paginiDiagnostico Necesidades de AprendizajeRicardo Lopez pradaÎncă nu există evaluări
- Quinto Postulado de EuclidesDocument5 paginiQuinto Postulado de EuclidesAlejandro GuerreroÎncă nu există evaluări
- Manual Planta Telefonica MC 208Document2 paginiManual Planta Telefonica MC 208jho gomezÎncă nu există evaluări
- DMS (Documento de Mantenimiento de Software)Document13 paginiDMS (Documento de Mantenimiento de Software)Manuel Enrique CantilloÎncă nu există evaluări
- Qué Es MecanografíaDocument2 paginiQué Es Mecanografíaluis marquezÎncă nu există evaluări
- Entrega Final Sistemas de La InformacionDocument24 paginiEntrega Final Sistemas de La InformacionwilmarÎncă nu există evaluări
- TeleinmersiónDocument5 paginiTeleinmersiónAlex Enrique Arenas OviedoÎncă nu există evaluări
- Adobe Muse Manual de ReferenciaDocument64 paginiAdobe Muse Manual de ReferenciaFernando TorresÎncă nu există evaluări
- Introducción a la programación en PHPDocument10 paginiIntroducción a la programación en PHPKarla GallardoÎncă nu există evaluări
- BroadcastDocument1 paginăBroadcastMiguel LuqueÎncă nu există evaluări
- Catalogo Completo ADAPTIVEDocument8 paginiCatalogo Completo ADAPTIVEbrreakerrÎncă nu există evaluări
- Arboles de Análisis GramaticalDocument15 paginiArboles de Análisis GramaticalgilbertoÎncă nu există evaluări
- Maquina MultinivelDocument23 paginiMaquina MultinivelJesús Antonio ReyesÎncă nu există evaluări
- Modulo 8Document15 paginiModulo 8anon_7123928360% (1)
- Manual de Ib-Expert 2.0 PDFDocument17 paginiManual de Ib-Expert 2.0 PDFFernando Lobo GuaraÎncă nu există evaluări
- Problemas de JuegosDocument58 paginiProblemas de JuegosServa26Încă nu există evaluări
- Manual Sensor Humedad y TemperaturaDocument10 paginiManual Sensor Humedad y TemperaturaVictor Fabian Soto MolinaÎncă nu există evaluări
- Guia de Referencia de XP 702Document48 paginiGuia de Referencia de XP 702Airo LopezÎncă nu există evaluări
- Indicadores FinancierosDocument5 paginiIndicadores FinancierosShirlys Suarez GÎncă nu există evaluări
- Mapa de Flujo de ValorDocument4 paginiMapa de Flujo de ValorPaúl Arturo Rodríguez YengleÎncă nu există evaluări
- Diseñador gráfico y fotógrafo en Mendoza, ArgentinaDocument37 paginiDiseñador gráfico y fotógrafo en Mendoza, ArgentinaphaqÎncă nu există evaluări
- Características y programación del LG MD 3000Document9 paginiCaracterísticas y programación del LG MD 3000Marcus VeroniÎncă nu există evaluări
- Créditos y CobranzasDocument2 paginiCréditos y CobranzasRonald CelisÎncă nu există evaluări
- CAPITULO 2-Estudio TecnicoDocument3 paginiCAPITULO 2-Estudio TecnicoFrancisco SenaÎncă nu există evaluări