S-ar putea să vă placă și
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Ship Classification, Ship Design and On Board Apparatus 2015Document96 paginiShip Classification, Ship Design and On Board Apparatus 2015Maurizio BernasconiÎncă nu există evaluări
- Steerprop Innovative Propulsion SolutionsDocument21 paginiSteerprop Innovative Propulsion SolutionsMaurizio BernasconiÎncă nu există evaluări
- Tesla - CRM Canvas Case StudyDocument28 paginiTesla - CRM Canvas Case StudyMaurizio BernasconiÎncă nu există evaluări
- Recent Advances in Hydrodynamic Design of Fast Monohulls 2005Document28 paginiRecent Advances in Hydrodynamic Design of Fast Monohulls 2005Maurizio BernasconiÎncă nu există evaluări
- WIG Design ThesisDocument110 paginiWIG Design ThesisMaurizio BernasconiÎncă nu există evaluări
- Special Propulsors - MARIN - RD - Seminar 2015Document32 paginiSpecial Propulsors - MARIN - RD - Seminar 2015Maurizio BernasconiÎncă nu există evaluări
- Scana Contrarotating PropulsionDocument4 paginiScana Contrarotating PropulsionMaurizio BernasconiÎncă nu există evaluări
- Description of The INSEAN E779A Propelle PDFDocument5 paginiDescription of The INSEAN E779A Propelle PDFMaurizio BernasconiÎncă nu există evaluări
- Hyundai 200 HPDocument2 paginiHyundai 200 HPMaurizio BernasconiÎncă nu există evaluări
- Marine Diesel - Duramax VGT-LP-SERIES 300 - 500 HP PDFDocument2 paginiMarine Diesel - Duramax VGT-LP-SERIES 300 - 500 HP PDFMaurizio BernasconiÎncă nu există evaluări
- Integration of Bulbous Bow and SONAR DomeDocument18 paginiIntegration of Bulbous Bow and SONAR DomeMaurizio BernasconiÎncă nu există evaluări
- Hydromecanics of Sprint CanoeDocument10 paginiHydromecanics of Sprint CanoeMaurizio Bernasconi100% (1)
- Australian Naval Architect - 1999Document52 paginiAustralian Naval Architect - 1999Maurizio BernasconiÎncă nu există evaluări
- Doen Waterjets BrochureDocument2 paginiDoen Waterjets BrochureMaurizio BernasconiÎncă nu există evaluări
- Re-Design The Wing of The C-212-400 PDFDocument6 paginiRe-Design The Wing of The C-212-400 PDFMaurizio BernasconiÎncă nu există evaluări
- Magnus Stabilizer - FlyerDocument2 paginiMagnus Stabilizer - FlyerMaurizio BernasconiÎncă nu există evaluări
- Australian Naval Architect MagazineDocument64 paginiAustralian Naval Architect MagazineMaurizio BernasconiÎncă nu există evaluări
- Hydroptere - FoilsDocument9 paginiHydroptere - FoilsMaurizio BernasconiÎncă nu există evaluări
- Submarine Stern DesignDocument11 paginiSubmarine Stern DesignMaurizio BernasconiÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1091)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- BOQ For 5th Utility BuildingsDocument15 paginiBOQ For 5th Utility Buildingssudesh1968Încă nu există evaluări
- Alternate GuagingDocument5 paginiAlternate GuagingAusi RobloxÎncă nu există evaluări
- HISTORY ISC GRADE 11 2018-19 Emergence of The Colonial Economy. Why Was There ADocument13 paginiHISTORY ISC GRADE 11 2018-19 Emergence of The Colonial Economy. Why Was There ACordelia SmithÎncă nu există evaluări
- Belgium Policing SystemDocument16 paginiBelgium Policing SystemError GodzÎncă nu există evaluări
- Purge PaperDocument5 paginiPurge PaperjoshÎncă nu există evaluări
- Tank Commander Tactical Pocket HandbookDocument72 paginiTank Commander Tactical Pocket HandbookHernandez Carlos100% (4)
- Act 243 Bintulu Port Authority Act 1981Document70 paginiAct 243 Bintulu Port Authority Act 1981Adam Haida & CoÎncă nu există evaluări
- Ban T CHC Ki Thi PDFDocument439 paginiBan T CHC Ki Thi PDFHuỳnh Tiến ĐạtÎncă nu există evaluări
- Zayen Prana Kusmuri, Ir - Yulian Taruna, M.Si, Yossa Yonathan Hutajulu, ST., MTDocument10 paginiZayen Prana Kusmuri, Ir - Yulian Taruna, M.Si, Yossa Yonathan Hutajulu, ST., MTzayen prana kusmuriÎncă nu există evaluări
- New Grader GR165 Front AxleDocument13 paginiNew Grader GR165 Front Axleasim ghoshÎncă nu există evaluări
- HUBTEX Electric Reach TruckDocument8 paginiHUBTEX Electric Reach TruckLuis MirÎncă nu există evaluări
- 9 Great Lakes Rules Jan24Document89 pagini9 Great Lakes Rules Jan24bobye488Încă nu există evaluări
- 868EXPLODDocument5 pagini868EXPLODmanuel vaqueroÎncă nu există evaluări
- E F Eng l1 l2 Si 059Document1 paginăE F Eng l1 l2 Si 059Simona Bute0% (1)
- Name Company Name CategoryDocument3 paginiName Company Name CategoryAnish JhaÎncă nu există evaluări
- Traffic TicketsDocument2 paginiTraffic TicketsSamar HammadyÎncă nu există evaluări
- Catalogo de MotoresDocument234 paginiCatalogo de MotoresRosa SilvaÎncă nu există evaluări
- Tractor Truck ChecklistDocument2 paginiTractor Truck ChecklistScribdTranslationsÎncă nu există evaluări
- ECDIS Rev 7Document25 paginiECDIS Rev 7On Elizama Lopes100% (1)
- Nkda Rules and Regulations For ResidentialDocument40 paginiNkda Rules and Regulations For ResidentialAman DugarÎncă nu există evaluări
- Edited - VCDS TutorialDocument153 paginiEdited - VCDS TutorialCherles Ponte100% (3)
- Paytm TicketDocument2 paginiPaytm Ticketibraheemk2066Încă nu există evaluări
- Last CargoDocument31 paginiLast Cargoashwin devaliyaÎncă nu există evaluări
- Andaman and Nicobar Islands PDFDocument3 paginiAndaman and Nicobar Islands PDFAmulya BahetiÎncă nu există evaluări
- Designing and Planning Transportation NetworksDocument27 paginiDesigning and Planning Transportation NetworksAswin Kumar75% (4)
- Road Traffic Injury Prevention ManualDocument126 paginiRoad Traffic Injury Prevention ManualthimjoplakuÎncă nu există evaluări
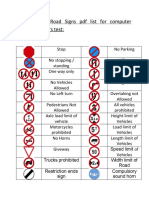
- Traffic Signs, Road Signs PDF List For Computer Driving Learners TestDocument4 paginiTraffic Signs, Road Signs PDF List For Computer Driving Learners TestAbhishek Sharma100% (2)
- Clean Air TestDocument56 paginiClean Air TestPrathamesh Gangal100% (5)
- Subject:: Ce - 313 Steel StructuresDocument87 paginiSubject:: Ce - 313 Steel StructuresabubakarÎncă nu există evaluări