S-ar putea să vă placă și
- Electric Circuits ECSE-2010 ECSE 2010: Today and Next ClassesDocument5 paginiElectric Circuits ECSE-2010 ECSE 2010: Today and Next Classeschristian9082Încă nu există evaluări
- Week #6: Laplace Transforms - IntroductionDocument31 paginiWeek #6: Laplace Transforms - IntroductionAbasi IbrahimÎncă nu există evaluări
- Time Domain Analysis of Control SystemsDocument25 paginiTime Domain Analysis of Control SystemsPavanÎncă nu există evaluări
- Laplace and z-transforms for system analysisDocument50 paginiLaplace and z-transforms for system analysisRehman SaleemÎncă nu există evaluări
- Introduction to Laplace Transforms for Solving Differential EquationsDocument47 paginiIntroduction to Laplace Transforms for Solving Differential EquationsTalha MazharÎncă nu există evaluări
- Signal and System Signal and SystemDocument94 paginiSignal and System Signal and SystempitayutÎncă nu există evaluări
- EMS507 Lecture 2 - Transfer function and block diagramsDocument20 paginiEMS507 Lecture 2 - Transfer function and block diagrams124ll124Încă nu există evaluări
- What Is Lagrange's EquationsDocument8 paginiWhat Is Lagrange's Equationsharyo rioÎncă nu există evaluări
- 3.state Space ModelingDocument169 pagini3.state Space ModelingMekonnen ShewaregaÎncă nu există evaluări
- 05-Laplace Transform and Its InverseDocument54 pagini05-Laplace Transform and Its InverseBerentoÎncă nu există evaluări
- Lecture Control 02 ModellingDocument50 paginiLecture Control 02 Modellingcesar ruizÎncă nu există evaluări
- 18MAT31 QB (Module 1 and 2)Document13 pagini18MAT31 QB (Module 1 and 2)ZAID AHMED.RÎncă nu există evaluări
- Linear System Theory Lecture OverviewDocument49 paginiLinear System Theory Lecture OverviewMuhammad HassanÎncă nu există evaluări
- Lect 2 - Modeling of Dynamic SystemsDocument34 paginiLect 2 - Modeling of Dynamic SystemsMartin LuhutÎncă nu există evaluări
- ME 475 Mechatronics: Semester: February 2015Document15 paginiME 475 Mechatronics: Semester: February 2015ফারহান আহমেদ আবীরÎncă nu există evaluări
- Tutorial 5: XT EutDocument2 paginiTutorial 5: XT EutNornis DalinaÎncă nu există evaluări
- Regulation and Control: by Tewedage SileshiDocument29 paginiRegulation and Control: by Tewedage SileshiSiraye AbirhamÎncă nu există evaluări
- Laplace Transform: Dr. Ajay Singh RaghuvanshiDocument66 paginiLaplace Transform: Dr. Ajay Singh RaghuvanshiBhaskarÎncă nu există evaluări
- DS08-system Analysis Using LTDocument45 paginiDS08-system Analysis Using LTAmanda ZahraÎncă nu există evaluări
- Process Control 5Document21 paginiProcess Control 5Mohamad AbdelkaderÎncă nu există evaluări
- Discretization, Controllability, State Feedback: Morten O. Alver (Based On Slides by Morten D. Pedersen)Document64 paginiDiscretization, Controllability, State Feedback: Morten O. Alver (Based On Slides by Morten D. Pedersen)Wiccy IhenaÎncă nu există evaluări
- 3 Laplace Transforms + BDsDocument39 pagini3 Laplace Transforms + BDsParth ShahÎncă nu există evaluări
- EE3331C Feedback Control Systems L3: Review of Laplace Transform & Transfer FunctionsDocument40 paginiEE3331C Feedback Control Systems L3: Review of Laplace Transform & Transfer Functionspremsanjith subramaniÎncă nu există evaluări
- Transform As I LaplaceDocument17 paginiTransform As I LaplacetriadirantealloÎncă nu există evaluări
- ch5 150613063859 Lva1 App6891 PDFDocument64 paginich5 150613063859 Lva1 App6891 PDFkhumisoÎncă nu există evaluări
- Module4 Signals and Systems LTDocument9 paginiModule4 Signals and Systems LTAkul PaiÎncă nu există evaluări
- Unit 13 - Week-11 Examples On DTFT and DFT: Assignment-11Document4 paginiUnit 13 - Week-11 Examples On DTFT and DFT: Assignment-11jithin danielÎncă nu există evaluări
- Analog Signals and SystemsDocument39 paginiAnalog Signals and SystemsTrần Hoàng QuânÎncă nu există evaluări
- A Short SVM (Support Vector Machine) TutorialDocument6 paginiA Short SVM (Support Vector Machine) Tutorialriyadh_proÎncă nu există evaluări
- Amendel SolDocument12 paginiAmendel SolChecozÎncă nu există evaluări
- Industrial Control: Assignment IIDocument12 paginiIndustrial Control: Assignment IIOMAR ALEJANDRO LONGORIA VAZQUEZÎncă nu există evaluări
- Lecture 2 - 4 - Second Order ResponsesDocument27 paginiLecture 2 - 4 - Second Order ResponsesLiyana HalimÎncă nu există evaluări
- Lab 4 - Time Domain AnalysisDocument16 paginiLab 4 - Time Domain AnalysisAneesh ChandÎncă nu există evaluări
- Solving Differential EquationsDocument21 paginiSolving Differential Equationstarek moahmoud khalifa0% (1)
- Feedback Control Systems (FCS) : Lecture-2 Transfer Function and Stability of LTI SystemsDocument29 paginiFeedback Control Systems (FCS) : Lecture-2 Transfer Function and Stability of LTI SystemsRomadhonFitriyantoÎncă nu există evaluări
- Control SystemsDocument2 paginiControl SystemsathenalavegaÎncă nu există evaluări
- W8 - Laplace Transform (Part 1)Document46 paginiW8 - Laplace Transform (Part 1)HermyraJ RobertÎncă nu există evaluări
- Linear Control Systems (LCS) Transfer Function and StabilityDocument34 paginiLinear Control Systems (LCS) Transfer Function and StabilityRIMSHA KHURSHID100% (1)
- CP1 AceDocument3 paginiCP1 AceSamuel MiramontesÎncă nu există evaluări
- Grinfeldstrang-Eigenvalues On PolygonsDocument15 paginiGrinfeldstrang-Eigenvalues On Polygonslogsdad291Încă nu există evaluări
- Filip FlopsDocument4 paginiFilip FlopsMohammed JeelanÎncă nu există evaluări
- Review: Today's Topic:: Pay Attention in Class!!Document31 paginiReview: Today's Topic:: Pay Attention in Class!!Tadeu FelixÎncă nu există evaluări
- Control SystemDocument28 paginiControl SystemKelvin KongÎncă nu există evaluări
- LAPLACE TRANSFORMS SOLVEDDocument36 paginiLAPLACE TRANSFORMS SOLVEDPratyush SrivastavaÎncă nu există evaluări
- Control Systems (CS) : Lecture-2 Transfer Function and Stability of LTI SystemsDocument35 paginiControl Systems (CS) : Lecture-2 Transfer Function and Stability of LTI SystemsAdil KhanÎncă nu există evaluări
- Robotics2 18.06.11Document9 paginiRobotics2 18.06.11Logon WolÎncă nu există evaluări
- 351 - 27435 - EE419 - 2020 - 1 - 2 - 1 - 0 5 EE419 Lec9 Solution of State EquationsDocument15 pagini351 - 27435 - EE419 - 2020 - 1 - 2 - 1 - 0 5 EE419 Lec9 Solution of State Equationsyoussef hossamÎncă nu există evaluări
- Digital Modulation Techniques ExplainedDocument42 paginiDigital Modulation Techniques ExplainedHuongNguyenÎncă nu există evaluări
- T T - It's Laplace Transform Is F (T), As Illustrated F (T) ) F (S)Document4 paginiT T - It's Laplace Transform Is F (T), As Illustrated F (T) ) F (S)Aravind VinasÎncă nu există evaluări
- IE474 Summer2022 Nise Ch2 PartA PDFDocument33 paginiIE474 Summer2022 Nise Ch2 PartA PDFAmon SimatwoÎncă nu există evaluări
- Model Reduction Lecture: Automatic Control SystemsDocument17 paginiModel Reduction Lecture: Automatic Control Systemsparthadas48Încă nu există evaluări
- Lecture 2: Discrete-Time Systems and Z-TransformDocument18 paginiLecture 2: Discrete-Time Systems and Z-TransformFaheem AbbasiÎncă nu există evaluări
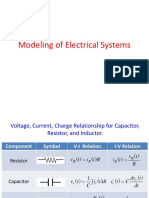
- Modeling of Electrical SystemsDocument51 paginiModeling of Electrical SystemsCheems PandeyÎncă nu există evaluări
- Block Diagram and Transfer FunctionsDocument20 paginiBlock Diagram and Transfer FunctionsBatuhan Mutlugil 'Duman'Încă nu există evaluări
- Lec - 3-4 - Transfer Function and Laplace TransformDocument54 paginiLec - 3-4 - Transfer Function and Laplace TransformMaryam BhattiÎncă nu există evaluări
- 9.3-4: Phase Plane PortraitsDocument9 pagini9.3-4: Phase Plane PortraitsAnonymous XgZHEFQdÎncă nu există evaluări
- Bini Cime PDFDocument281 paginiBini Cime PDFImron MashuriÎncă nu există evaluări
- Lab 02Document2 paginiLab 02CHEANG HOR PHENGÎncă nu există evaluări
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99De la EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99Încă nu există evaluări
- Transmutation and Operator Differential EquationsDe la EverandTransmutation and Operator Differential EquationsÎncă nu există evaluări
- An 855 - PCI Express High Performance Reference Design For Intel Cyclone 10 GXDocument19 paginiAn 855 - PCI Express High Performance Reference Design For Intel Cyclone 10 GXVenkatGollaÎncă nu există evaluări
- Ug m10 ConfigDocument68 paginiUg m10 ConfigVenkatGollaÎncă nu există evaluări
- Power SequencerDocument31 paginiPower SequencerVenkatGollaÎncă nu există evaluări
- AsplabDocument53 paginiAsplabVenkatGollaÎncă nu există evaluări
- VLSI Design Overview and Questionnaires - FPGA Interview Questions and Answers PDFDocument7 paginiVLSI Design Overview and Questionnaires - FPGA Interview Questions and Answers PDFVenkatGollaÎncă nu există evaluări
- Simple Power Sequencer Design For MAX10 Rev2Document19 paginiSimple Power Sequencer Design For MAX10 Rev2VenkatGollaÎncă nu există evaluări
- 10 M 04 SCDocument11 pagini10 M 04 SCVenkatGollaÎncă nu există evaluări
- Uvm Class LabnotesDocument32 paginiUvm Class LabnotesGOKUL TÎncă nu există evaluări
- SoC VerificationDocument68 paginiSoC VerificationspaulsÎncă nu există evaluări
- SoC VerificationDocument68 paginiSoC VerificationspaulsÎncă nu există evaluări
- EDC Formula Notes - PDF 65Document8 paginiEDC Formula Notes - PDF 65VenkatGollaÎncă nu există evaluări
- ConstraintsDocument319 paginiConstraintsVenkatGollaÎncă nu există evaluări
- Lec10 Sram1Document19 paginiLec10 Sram1VenkatGollaÎncă nu există evaluări
- InterviewDocument1 paginăInterviewVenkatGollaÎncă nu există evaluări
- Difference Between A Latch and A Flip Flop PDFDocument2 paginiDifference Between A Latch and A Flip Flop PDFVenkatGollaÎncă nu există evaluări
- List of Satellites Launched by ISRO - Bank Exams Today PDFDocument10 paginiList of Satellites Launched by ISRO - Bank Exams Today PDFVenkatGollaÎncă nu există evaluări
- Digital Electronics PDFDocument224 paginiDigital Electronics PDFSruthy Arun100% (1)
- Lecture 2-4 - VHDL Basics PDFDocument154 paginiLecture 2-4 - VHDL Basics PDFVenkatGollaÎncă nu există evaluări
- CH 05Document63 paginiCH 05VenkatGollaÎncă nu există evaluări
- Design and Implementation of VGA Controller On FPGADocument8 paginiDesign and Implementation of VGA Controller On FPGAVenkatGollaÎncă nu există evaluări
- Assignment 12Document4 paginiAssignment 12VenkatGollaÎncă nu există evaluări
- Digital Electronics PDFDocument224 paginiDigital Electronics PDFSruthy Arun100% (1)
- MPMC@ASSMENT5Document4 paginiMPMC@ASSMENT5VenkatGollaÎncă nu există evaluări
- Eoi 4Document80 paginiEoi 4VenkatGollaÎncă nu există evaluări
- Introduction To CountersDocument11 paginiIntroduction To CountersVenkatGollaÎncă nu există evaluări
- Frequency AllocationDocument1 paginăFrequency AllocationVenkatGollaÎncă nu există evaluări
- List of Linear IC ExperimentsDocument26 paginiList of Linear IC ExperimentsVenkatGollaÎncă nu există evaluări
- Introduction To CountersDocument11 paginiIntroduction To CountersVenkatGollaÎncă nu există evaluări
- Orbital Perturbations: Orbital Perturbation - Difference Between Real Orbit and KeplerianDocument11 paginiOrbital Perturbations: Orbital Perturbation - Difference Between Real Orbit and KeplerianVenkatGollaÎncă nu există evaluări
- Frenkel Introduction To Langlands ProgramDocument46 paginiFrenkel Introduction To Langlands ProgramFernando Conde-Pumpido VelascoÎncă nu există evaluări
- Composite Number B.I Wiki.Document3 paginiComposite Number B.I Wiki.Eciqz KiciÎncă nu există evaluări
- Use A Direct Proof To Show That The Sum of Two Even Integers Is EvenDocument1 paginăUse A Direct Proof To Show That The Sum of Two Even Integers Is Evenreybi tubilÎncă nu există evaluări
- Introduction to Algebraic and Analytic GeometryDocument374 paginiIntroduction to Algebraic and Analytic GeometryxxxÎncă nu există evaluări
- Lie Groups and Lie Algebras, Chapters 4-6 - Nicolas BourbakiDocument314 paginiLie Groups and Lie Algebras, Chapters 4-6 - Nicolas BourbakiVargas Carrillo José ManuelÎncă nu există evaluări
- Jeurnink G.a.M. - Integration of Functions With Values in A Banach Lattice (PHD Thesis) (1982)Document200 paginiJeurnink G.a.M. - Integration of Functions With Values in A Banach Lattice (PHD Thesis) (1982)wahidah_886572002Încă nu există evaluări
- SB PDFDocument14 paginiSB PDFsuchi ravaliaÎncă nu există evaluări
- Conjugate PDFDocument2 paginiConjugate PDFIna RossÎncă nu există evaluări
- IIT JEE Formula MathsDocument24 paginiIIT JEE Formula MathsSHWAANÎncă nu există evaluări
- Functions 283 PDFDocument398 paginiFunctions 283 PDFDev DaliaÎncă nu există evaluări
- PERSEDIAAN 2019 – LATIHAN ASAS MATH CATCH TOPIK INDICESDocument25 paginiPERSEDIAAN 2019 – LATIHAN ASAS MATH CATCH TOPIK INDICESiqbal hisham78% (9)
- Ch3 Bijection PrincipleDocument7 paginiCh3 Bijection PrincipleMichael LinÎncă nu există evaluări
- The Transcendence of π: Steve Mayer November 2006Document6 paginiThe Transcendence of π: Steve Mayer November 2006Fernando CarvalhoÎncă nu există evaluări
- An Introduction To Optimization 4th Edition Solution Manual PDFDocument220 paginiAn Introduction To Optimization 4th Edition Solution Manual PDFsalman100% (1)
- Transformation of Graphs by Greatest Integer Function 5Document7 paginiTransformation of Graphs by Greatest Integer Function 5anuragÎncă nu există evaluări
- Linear Transformations: Dr. A V PrajeeshDocument21 paginiLinear Transformations: Dr. A V PrajeeshADLURI SRIKARÎncă nu există evaluări
- DeterminationDocument17 paginiDeterminationayshakabir004Încă nu există evaluări
- Theory of Equations Part 1Document56 paginiTheory of Equations Part 1Naveen kumar100% (1)
- Homework 3Document2 paginiHomework 3jerryÎncă nu există evaluări
- Toom Cook Polynomials BodratoDocument15 paginiToom Cook Polynomials BodratoJuan Pastor RamosÎncă nu există evaluări
- Tut 3Document2 paginiTut 3ANUJ KUMARÎncă nu există evaluări
- MH1810 Tut 1 2013 ComplexDocument3 paginiMH1810 Tut 1 2013 ComplexNhân TrầnÎncă nu există evaluări
- YT +Quadratic+equations+Top+DPPs +11th+eliteDocument64 paginiYT +Quadratic+equations+Top+DPPs +11th+elitekothapalliharishaÎncă nu există evaluări
- STD 9th Perfect Mathematics 1 Notes English Medium MH Board PDFDocument26 paginiSTD 9th Perfect Mathematics 1 Notes English Medium MH Board PDFvitthal sawantÎncă nu există evaluări
- Mathematics in The Modern World - PrelimsDocument3 paginiMathematics in The Modern World - PrelimsMANAMTAM Ann KylieÎncă nu există evaluări
- Ramanujan School of Mathematics PRMO 2018 mock test questionsDocument3 paginiRamanujan School of Mathematics PRMO 2018 mock test questionsPritam BeraÎncă nu există evaluări
- 1 - Partial Derivatives Lec6Document10 pagini1 - Partial Derivatives Lec6Aya TahaÎncă nu există evaluări
- Geometry and Physics by Atiyah, Dijkgraaf, HitchinDocument15 paginiGeometry and Physics by Atiyah, Dijkgraaf, HitchinTensegrity Wiki100% (2)