S-ar putea să vă placă și
- Induction Motor Parameter MeasurementDocument10 paginiInduction Motor Parameter Measurementvaljir23Încă nu există evaluări
- Sensorless-FOC With Flux-Weakening and MTPA IPMSM Motor Drives PDFDocument17 paginiSensorless-FOC With Flux-Weakening and MTPA IPMSM Motor Drives PDFBook4AllÎncă nu există evaluări
- Spruhj 1 CDocument482 paginiSpruhj 1 CthietdaucongÎncă nu există evaluări
- Ultra Stick 25 eDocument72 paginiUltra Stick 25 eFlorea Maria BiancaÎncă nu există evaluări
- 0 Item (Https://robu - In/cart/)Document6 pagini0 Item (Https://robu - In/cart/)chandanÎncă nu există evaluări
- 04 Intro To InstaSPIN-FOCDocument27 pagini04 Intro To InstaSPIN-FOCgedeus8072Încă nu există evaluări
- CONTROL OF INDUCTION MOTORS FOR TRACTION SYSTEMSDocument9 paginiCONTROL OF INDUCTION MOTORS FOR TRACTION SYSTEMSLaurence MichaelÎncă nu există evaluări
- User Manual Sps SeriesDocument28 paginiUser Manual Sps SeriesMe MeÎncă nu există evaluări
- KEB v3 - 21 Rev1A 08 - 2014 PDFDocument314 paginiKEB v3 - 21 Rev1A 08 - 2014 PDFDaniel GonzalezÎncă nu există evaluări
- CSR BC417 DatasheetDocument116 paginiCSR BC417 DatasheetChấm Hết100% (2)
- MODULAR PROGRAMME COURSEWORK CONTROL ASSESSMENTDocument7 paginiMODULAR PROGRAMME COURSEWORK CONTROL ASSESSMENTJohn AssadÎncă nu există evaluări
- PFC 5kw V2Document27 paginiPFC 5kw V2Roby JackÎncă nu există evaluări
- LVDTDocument8 paginiLVDTAnirban GhoshÎncă nu există evaluări
- Multistage Coil Gun Project ProposalDocument8 paginiMultistage Coil Gun Project ProposalAbdullah ArifÎncă nu există evaluări
- Howland Current SourceDocument9 paginiHowland Current SourceanugrasÎncă nu există evaluări
- BassmanDocument1 paginăBassmanAnonymous r8GTfkD2Încă nu există evaluări
- Spectrum Analyzer Operation GuideDocument246 paginiSpectrum Analyzer Operation Guidebayman66Încă nu există evaluări
- Operational AmplifierDocument17 paginiOperational AmplifierDan AdrianÎncă nu există evaluări
- Hammond PSU Design GuideDocument1 paginăHammond PSU Design Guidekimbalsummers801Încă nu există evaluări
- Arduino 101: Timers and Interrupts GuideDocument10 paginiArduino 101: Timers and Interrupts GuideFabian Monteleone100% (1)
- A9 A9G Manual - ZH-CN - enDocument28 paginiA9 A9G Manual - ZH-CN - enMEET PATELÎncă nu există evaluări
- Sine Wave GeneratorDocument12 paginiSine Wave GeneratorkjfensÎncă nu există evaluări
- DLA-X3-xx - XC380-xx - X7-xx - XC780-xx - X9-xx - XC980-xx (SCH)Document36 paginiDLA-X3-xx - XC380-xx - X7-xx - XC780-xx - X9-xx - XC980-xx (SCH)ixigen2115Încă nu există evaluări
- Switch Mode Power Supplies: SPICE Simulations and Practical DesignsDocument9 paginiSwitch Mode Power Supplies: SPICE Simulations and Practical Designscms124dÎncă nu există evaluări
- Anti Sleep Alarm RDocument31 paginiAnti Sleep Alarm RPrints Bindings100% (1)
- Low Power Nine-Bit Sigma-Delta ADC Design Using TSMC 0.18micron TechnologyDocument5 paginiLow Power Nine-Bit Sigma-Delta ADC Design Using TSMC 0.18micron Technologyeditor_ijtel100% (1)
- Class D Amplifiers - Interactive SimulationsDocument5 paginiClass D Amplifiers - Interactive SimulationsCristi BondÎncă nu există evaluări
- 4000 Series Logic and Analog CircuitryDocument13 pagini4000 Series Logic and Analog Circuitrysage.electconÎncă nu există evaluări
- Programming 16 Bit Timer On Atmega328Document9 paginiProgramming 16 Bit Timer On Atmega328VisitOn.T.witte.r100% (1)
- Delay 1.0K Millis 2.3K Micros 1.0K Delaymicroseconds 359 Analogwrite 274 Tone 1.4K Notone 76 Servo Library 1.6KDocument11 paginiDelay 1.0K Millis 2.3K Micros 1.0K Delaymicroseconds 359 Analogwrite 274 Tone 1.4K Notone 76 Servo Library 1.6KOthmane Bouzarzar100% (1)
- 40A Power Supply UnitDocument6 pagini40A Power Supply Unitrsira2001100% (3)
- Clap Switch Using Op-Amp REPORTDocument13 paginiClap Switch Using Op-Amp REPORTMayur SutarÎncă nu există evaluări
- Harmonics Analysis For Ships and Industrial Power Systems (HASIP) Version 1, March 17, 2004Document4 paginiHarmonics Analysis For Ships and Industrial Power Systems (HASIP) Version 1, March 17, 2004kgskgmÎncă nu există evaluări
- Rfid Based Security System: A Project ReportDocument22 paginiRfid Based Security System: A Project ReportHeartin HariÎncă nu există evaluări
- Battery Charger - DC RectifierDocument8 paginiBattery Charger - DC Rectifierghribiabdelwadoud4131Încă nu există evaluări
- Darlington PairDocument5 paginiDarlington PairHubert Sheldon Diaz100% (1)
- Philips Chassis L01.1a 29pt5507 58 SCHDocument32 paginiPhilips Chassis L01.1a 29pt5507 58 SCHCiolacu AlexÎncă nu există evaluări
- AEM600 Lateral MOS-FET Audio Amplifier DesignDocument5 paginiAEM600 Lateral MOS-FET Audio Amplifier DesignCristi Mihalcea100% (1)
- Iraudamp1 PDFDocument22 paginiIraudamp1 PDFamijoski6051Încă nu există evaluări
- Circuit Analysis 2 Lab Report 2 Pieas PakistanDocument6 paginiCircuit Analysis 2 Lab Report 2 Pieas PakistanMUYJ NewsÎncă nu există evaluări
- Bluetooth Modules - Martyn Currey PDFDocument64 paginiBluetooth Modules - Martyn Currey PDFAng Tze Wern100% (1)
- Feedback 56-200Document2 paginiFeedback 56-200Fahad Rasool100% (1)
- Hearing Aid (Project Report)Document5 paginiHearing Aid (Project Report)Speech's ClubÎncă nu există evaluări
- Audio Equalizer Report PDFDocument15 paginiAudio Equalizer Report PDFSidra Fahim100% (1)
- Sigma Delta Modulator NutshellDocument5 paginiSigma Delta Modulator NutshellZubair MohammedÎncă nu există evaluări
- Linear Variable Displacement Transducer (LVDT)Document3 paginiLinear Variable Displacement Transducer (LVDT)SE ElectricalÎncă nu există evaluări
- WalkThrough and Handheld Metal DetectorDocument37 paginiWalkThrough and Handheld Metal DetectorEdward Camongol MañiboÎncă nu există evaluări
- LPC2148 User ManualDocument62 paginiLPC2148 User ManualAri Krishnan0% (2)
- BJT Amplifier Low Frequency ResponseDocument18 paginiBJT Amplifier Low Frequency ResponseAqsaAziz0% (1)
- Electronic FilterDocument10 paginiElectronic Filterapi-3805241Încă nu există evaluări
- (Manual) Estun ProNet PROFIBUS Communication EN v1.01 PDFDocument30 pagini(Manual) Estun ProNet PROFIBUS Communication EN v1.01 PDFjns1606Încă nu există evaluări
- 10ESL37 - Analog Electronics Lab ManualDocument69 pagini10ESL37 - Analog Electronics Lab ManualVinita AgrawalÎncă nu există evaluări
- Active Disturbance Rejection Control for Nonlinear Systems: An IntroductionDe la EverandActive Disturbance Rejection Control for Nonlinear Systems: An IntroductionÎncă nu există evaluări
- Arduino DC Motor ControlDocument4 paginiArduino DC Motor ControlKathryn WorkmanÎncă nu există evaluări
- PMSM Drive with Sensorless Control TutorialDocument16 paginiPMSM Drive with Sensorless Control TutorialTeklu Abebe WoldeÎncă nu există evaluări
- DSPACE Procedure With MPPT ExampleDocument21 paginiDSPACE Procedure With MPPT ExampleSri SriÎncă nu există evaluări
- Estimate Motor Parameters by Using Motor Control Blockset Parameter Estimation Tool - MATLAB & SimulinkDocument5 paginiEstimate Motor Parameters by Using Motor Control Blockset Parameter Estimation Tool - MATLAB & SimulinkarashengÎncă nu există evaluări
- Sensors and Sensing Lab 1: Arduino Motor Control and ROSDocument7 paginiSensors and Sensing Lab 1: Arduino Motor Control and ROSFebri Rizky PratamaÎncă nu există evaluări
- Experiment: 1: Government Engineering College Sector-28, GandhinagarDocument7 paginiExperiment: 1: Government Engineering College Sector-28, GandhinagarDhrumil ManiyarÎncă nu există evaluări
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlDe la EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlEvaluare: 5 din 5 stele5/5 (1)
- Getting Started With The C RIO and LabviewDocument31 paginiGetting Started With The C RIO and LabviewTom KigeziÎncă nu există evaluări
- Buck Boost ExerciseDocument3 paginiBuck Boost ExercisebajarfileÎncă nu există evaluări
- National Instruments Sensor White PaperDocument29 paginiNational Instruments Sensor White PaperDavid WoodÎncă nu există evaluări
- PSIM HelpDocument8 paginiPSIM HelpFayyaz KashifÎncă nu există evaluări
- DQ Alpha, BetaDocument46 paginiDQ Alpha, BetaSrching FrndsÎncă nu există evaluări
- GeckoCIRCUITS Beginners TutorialDocument21 paginiGeckoCIRCUITS Beginners TutorialLuis Enrique JiménezÎncă nu există evaluări
- Smart Energy SolutionsDocument16 paginiSmart Energy SolutionsbajarfileÎncă nu există evaluări
- Psim ManualDocument126 paginiPsim Manualht_fernandesÎncă nu există evaluări
- Creating Quality Uis With LabviewDocument51 paginiCreating Quality Uis With LabviewWilmer Yesid Granados JaimesÎncă nu există evaluări
- Intro To Power Management PDFDocument37 paginiIntro To Power Management PDFbajarfileÎncă nu există evaluări
- AD PowerManagementSolutions 03 2014Document1 paginăAD PowerManagementSolutions 03 2014bajarfileÎncă nu există evaluări
- Manual Generador AFG310Document276 paginiManual Generador AFG310bajarfileÎncă nu există evaluări
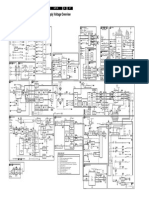
- Voltage Measurement PT 1Document8 paginiVoltage Measurement PT 1bajarfileÎncă nu există evaluări
- Voltage Measurement PT 2Document14 paginiVoltage Measurement PT 2bajarfileÎncă nu există evaluări
- Preguntas y Respuestas FOC-BLDCDocument4 paginiPreguntas y Respuestas FOC-BLDCbajarfileÎncă nu există evaluări
- SITTutorialDocument13 paginiSITTutorialbajarfileÎncă nu există evaluări
- Catalogo I7000Document34 paginiCatalogo I7000bajarfileÎncă nu există evaluări
- English Irregular Verb List - CompleteDocument18 paginiEnglish Irregular Verb List - CompleteBruno MatosÎncă nu există evaluări
- Measurements For Competitiveness in Electronics: First EditionDocument478 paginiMeasurements For Competitiveness in Electronics: First EditionbajarfileÎncă nu există evaluări
- English Irregular Verb List - CompleteDocument18 paginiEnglish Irregular Verb List - CompleteBruno MatosÎncă nu există evaluări
- Szza 058Document29 paginiSzza 058ilasca_mariusÎncă nu există evaluări
- Ansible PresentationDocument23 paginiAnsible Presentationstanislaw.jachuraÎncă nu există evaluări
- VisionDocument219 paginiVisionestevezcÎncă nu există evaluări
- WLC D1Document2 paginiWLC D1jvtamilanbanÎncă nu există evaluări
- DCS LowresDocument2 paginiDCS LowresLittle BigdoeuÎncă nu există evaluări
- Control Valve Dx28 Solar III 20287132gDocument58 paginiControl Valve Dx28 Solar III 20287132gAlejandro Mayr100% (1)
- Sprabj 1Document20 paginiSprabj 1Anonymous OFQuRiZOUzÎncă nu există evaluări
- MX84 Installation GuideDocument5 paginiMX84 Installation GuideDmitryÎncă nu există evaluări
- Cyber Security Guide to CASB, Threats & Best PracticesDocument26 paginiCyber Security Guide to CASB, Threats & Best PracticesTharun RickyÎncă nu există evaluări
- Spanning Tree Protocol: CCNA3-1 Chapter 5-2Document34 paginiSpanning Tree Protocol: CCNA3-1 Chapter 5-2mohammad ramdhanÎncă nu există evaluări
- Technische Daten D 2840 LE 20x-Eng4Document1 paginăTechnische Daten D 2840 LE 20x-Eng4Daniel GraterolÎncă nu există evaluări
- Appendix B: Suggested OBE Learning Program For EDUCATIONAL TECHNOLOGY 1Document7 paginiAppendix B: Suggested OBE Learning Program For EDUCATIONAL TECHNOLOGY 1Albert Magno Caoile100% (1)
- Arduino Interfacing With LCD Without Potentiometer - InstructablesDocument6 paginiArduino Interfacing With LCD Without Potentiometer - Instructablesakinlabi aderibigbeÎncă nu există evaluări
- PYTHON HACKING GUIDEDocument34 paginiPYTHON HACKING GUIDEElias JuniorÎncă nu există evaluări
- Error TPVDocument7 paginiError TPVdiloÎncă nu există evaluări
- Relay 543 - 545 ManualDocument70 paginiRelay 543 - 545 ManualVenkatesh Rao100% (2)
- AVH-P5000DVD: Connecting The Units EnglishDocument8 paginiAVH-P5000DVD: Connecting The Units EnglishLuiz FigueiredoÎncă nu există evaluări
- Bridge Evaluation Report - 87m - R1Document15 paginiBridge Evaluation Report - 87m - R1hari om sharmaÎncă nu există evaluări
- CipherLab RK95 EN BrochureDocument4 paginiCipherLab RK95 EN BrochureHelpdesk GantengÎncă nu există evaluări
- ELEC 6831 OutlineDocument2 paginiELEC 6831 OutlineRaja Huzaifa100% (1)
- Huawei HCNA-VC Certification TrainingDocument3 paginiHuawei HCNA-VC Certification TrainingArvind JainÎncă nu există evaluări
- Apr 9600Document18 paginiApr 9600trilian1978Încă nu există evaluări
- Indian Railways - Powering Through To ExcellenceDocument14 paginiIndian Railways - Powering Through To ExcellenceM Joshua AlfredÎncă nu există evaluări
- Embedded Systems Model Question PaperDocument6 paginiEmbedded Systems Model Question PaperSubramanyaAIyerÎncă nu există evaluări
- Manage MySAP CRM Internet Sales 2.0BDocument38 paginiManage MySAP CRM Internet Sales 2.0BSuresh ReddyÎncă nu există evaluări
- Performance Management SetupsDocument34 paginiPerformance Management Setupshamdy2001100% (6)
- RR 310Document59 paginiRR 310tvsparavattani100% (1)
- Installing Process Instrumentation and Controlling Cabling and TubingDocument48 paginiInstalling Process Instrumentation and Controlling Cabling and TubingAbela DrrsÎncă nu există evaluări
- AC MotorDocument18 paginiAC MotorNAVNEET GUPTAÎncă nu există evaluări
- Composing Interactive MusicDocument365 paginiComposing Interactive Musicmarc80% (10)
- Adele Kuzmiakova - The Creation and Management of Database Systems-Arcler Press (2023)Document262 paginiAdele Kuzmiakova - The Creation and Management of Database Systems-Arcler Press (2023)alote1146Încă nu există evaluări