S-ar putea să vă placă și
- Bloquear o Desbloquear Áreas Específicas ExcelDocument13 paginiBloquear o Desbloquear Áreas Específicas ExcelJ M Marín LópezÎncă nu există evaluări
- Grúa RomanaDocument23 paginiGrúa RomanaJ M Marín LópezÎncă nu există evaluări
- Mecanismo de Cuatro BarrasDocument1 paginăMecanismo de Cuatro BarrasJ M Marín LópezÎncă nu există evaluări
- TEIQPractica12y4 2008Document40 paginiTEIQPractica12y4 2008Issis Milly EspinosaÎncă nu există evaluări
- CarretaDocument10 paginiCarretaJ M Marín LópezÎncă nu există evaluări
- Cinemática de máquinas - Ejercicios de velocidad y aceleraciónDocument12 paginiCinemática de máquinas - Ejercicios de velocidad y aceleraciónJ M Marín LópezÎncă nu există evaluări
- Cinemática de máquinas - Ejercicios de velocidad y aceleraciónDocument12 paginiCinemática de máquinas - Ejercicios de velocidad y aceleraciónJ M Marín LópezÎncă nu există evaluări
- DK HelpDocument9 paginiDK HelpLaloLandaÎncă nu există evaluări
- Cinemática de máquinas - Ejercicios de velocidad y aceleraciónDocument12 paginiCinemática de máquinas - Ejercicios de velocidad y aceleraciónJ M Marín LópezÎncă nu există evaluări
- Construccion MaquinasDocument3 paginiConstruccion MaquinasJ M Marín LópezÎncă nu există evaluări
- Cómo Restaurar Excel Sin ReinstalarDocument3 paginiCómo Restaurar Excel Sin ReinstalarJ M Marín LópezÎncă nu există evaluări
- TEIQPractica12y4 2008Document40 paginiTEIQPractica12y4 2008Issis Milly EspinosaÎncă nu există evaluări
- 2B Fisica - UD01 PDFDocument26 pagini2B Fisica - UD01 PDFkaryÎncă nu există evaluări
- LEY - Cat - Es ACTUADOR SERVO PDFDocument40 paginiLEY - Cat - Es ACTUADOR SERVO PDFrebheraÎncă nu există evaluări
- Ejercicio Problema FisicaDocument316 paginiEjercicio Problema FisicaJ M Marín LópezÎncă nu există evaluări
- Motor Paso A PasoDocument3 paginiMotor Paso A PasoJ M Marín LópezÎncă nu există evaluări
- Fuerzas Que Actúan Sobre Un MecanismoDocument1 paginăFuerzas Que Actúan Sobre Un MecanismoJ M Marín LópezÎncă nu există evaluări
- Guerra Fe Erratas 03 Ago 2017Document8 paginiGuerra Fe Erratas 03 Ago 2017J M Marín LópezÎncă nu există evaluări
- FrasesDocument1 paginăFrasesJ M Marín LópezÎncă nu există evaluări
- Manual de Practicas de SolidworksDocument141 paginiManual de Practicas de Solidworksgiovannyy75% (4)
- Dibujando Curvas Algebraicas Planas Mediante Sistemas ArticuladosDocument59 paginiDibujando Curvas Algebraicas Planas Mediante Sistemas ArticuladosJ M Marín LópezÎncă nu există evaluări
- Eremu Grabitatorioa Anaya PDFDocument12 paginiEremu Grabitatorioa Anaya PDFgarlegorÎncă nu există evaluări
- Libro de FísicaDocument299 paginiLibro de FísicaJ M Marín López100% (1)
- Velocidades angulares y relativa de barras giratorias conectadasDocument2 paginiVelocidades angulares y relativa de barras giratorias conectadasJ M Marín LópezÎncă nu există evaluări
- Clculo de Engranajes de Diente RectoDocument4 paginiClculo de Engranajes de Diente RectomarlonkpÎncă nu există evaluări
- Motor Paso A PasoDocument3 paginiMotor Paso A PasoJ M Marín LópezÎncă nu există evaluări
- Clculo de Engranajes de Diente RectoDocument4 paginiClculo de Engranajes de Diente RectomarlonkpÎncă nu există evaluări
- Cho QuesDocument15 paginiCho QuesJhonnatan Eduardo Zamudio PalaciosÎncă nu există evaluări
- 2 Montaje Bases y Soporte para Cojinetes AntifriccionDocument57 pagini2 Montaje Bases y Soporte para Cojinetes AntifriccionFabricio Roldan ErazoÎncă nu există evaluări
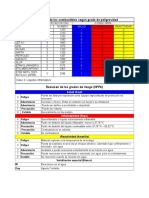
- Codigos Nfpa Onu CombustiblesDocument2 paginiCodigos Nfpa Onu CombustiblesEdson Arica Raymundo100% (1)
- Informe para Repsol YpfDocument8 paginiInforme para Repsol YpfEvelyn Gabriela Lema VinuezaÎncă nu există evaluări
- Datos Sobre Residuos Urbanos - CochabambaDocument12 paginiDatos Sobre Residuos Urbanos - CochabambaMauricio GomezÎncă nu există evaluări
- Meta 44Document15 paginiMeta 44Compu RedÎncă nu există evaluări
- Postes PRFV ventajasDocument2 paginiPostes PRFV ventajasFranco Michael Alanya ParionaÎncă nu există evaluări
- Aumentar Potencia en La Cobra 148 GTLDocument7 paginiAumentar Potencia en La Cobra 148 GTLCiber Kraken100% (3)
- Medición y verificación de roscas y engranesDocument51 paginiMedición y verificación de roscas y engranesDaniel Oso MendzÎncă nu există evaluări
- Proceso de reducción directa H y LDocument19 paginiProceso de reducción directa H y LJOSEPH ABEL AYMA CUTIÎncă nu există evaluări
- Instrumentos de Gestion Ambiental en ElDocument267 paginiInstrumentos de Gestion Ambiental en ElOswaldo Garay EchevarríaÎncă nu există evaluări
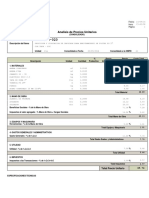
- Análisis de precios unitarios GAM La PazDocument4.522 paginiAnálisis de precios unitarios GAM La Pazrap3232Încă nu există evaluări
- Folleto de Mezcladoras WhitemanDocument8 paginiFolleto de Mezcladoras WhitemanFito FuerteÎncă nu există evaluări
- Practica 8Document7 paginiPractica 8Fernanda Guadalupe Ramírez MuñozÎncă nu există evaluări
- Fundamentos TeoricosDocument32 paginiFundamentos TeoricosChristian MavarezÎncă nu există evaluări
- Cromatografía LíquidaDocument16 paginiCromatografía LíquidaCarlos OrbeaÎncă nu există evaluări
- TP 4 2023Document1 paginăTP 4 2023Flor FiordomoÎncă nu există evaluări
- Ayudante de AlbañilDocument4 paginiAyudante de AlbañilGonzalo Andres Leon VicencioÎncă nu există evaluări
- 2 Clasificamos Reducimos ReutilizamosDocument18 pagini2 Clasificamos Reducimos ReutilizamosLuis GranadosÎncă nu există evaluări
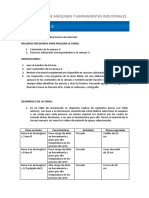
- S3 - Tarea - V1 - Fundamentos de Máquinas y Herramientas Industriales PDFDocument2 paginiS3 - Tarea - V1 - Fundamentos de Máquinas y Herramientas Industriales PDFDaniel MirandaÎncă nu există evaluări
- Cepillo Modelador 307024 - ESDocument64 paginiCepillo Modelador 307024 - ESBollito PerladoÎncă nu există evaluări
- Componentes Quimicos de La ComputadoraDocument1 paginăComponentes Quimicos de La ComputadoraFabiola Lizette Cano GallegosÎncă nu există evaluări
- Especificaciones TecnicasDocument4 paginiEspecificaciones Tecnicasverónica alisteÎncă nu există evaluări
- Monografia Edad de Los MetalesDocument15 paginiMonografia Edad de Los MetalesOscar CamposÎncă nu există evaluări
- Diagrma BimanualDocument10 paginiDiagrma BimanualMiriam Guzman BejaranoÎncă nu există evaluări
- Guia para El Manejo de Aceites UsadosDocument6 paginiGuia para El Manejo de Aceites Usadosjedy44Încă nu există evaluări
- Catalogo Cuñado FiltrosDocument8 paginiCatalogo Cuñado Filtrosjarv7910Încă nu există evaluări
- Marco Teorico Del LadrilloDocument14 paginiMarco Teorico Del Ladrilloromer pacheco gilvonioÎncă nu există evaluări
- Presupuesto de Vivienda Multifamiliar de 5 Pisos + SemisotanoDocument10 paginiPresupuesto de Vivienda Multifamiliar de 5 Pisos + Semisotanodennis_orue67% (3)
- Metano PDFDocument10 paginiMetano PDFÁngel AcostaÎncă nu există evaluări
- VCL 4140 SebaDocument2 paginiVCL 4140 SebaCarlos CastilloÎncă nu există evaluări
- Sistemas de Manantiales Submarinos 2Document7 paginiSistemas de Manantiales Submarinos 2Alexander Escobar MoralesÎncă nu există evaluări