S-ar putea să vă placă și
- A-level Maths Revision: Cheeky Revision ShortcutsDe la EverandA-level Maths Revision: Cheeky Revision ShortcutsEvaluare: 3.5 din 5 stele3.5/5 (8)
- CFD PHD Course DavidsonDocument6 paginiCFD PHD Course Davidsondfi49965Încă nu există evaluări
- Chapter 6 PDFDocument13 paginiChapter 6 PDFMarcosÎncă nu există evaluări
- Collocated FVMDocument17 paginiCollocated FVMapoorvs75Încă nu există evaluări
- 1 PDFDocument7 pagini1 PDFnima2020Încă nu există evaluări
- Actuator Disc Model Using A Modified Rhie-Chow/SIMPLE Pressure Correction Algorithm. Comparison With Analytical SolutionsDocument11 paginiActuator Disc Model Using A Modified Rhie-Chow/SIMPLE Pressure Correction Algorithm. Comparison With Analytical Solutionspierre_elouanÎncă nu există evaluări
- Esci342 Lesson07 Continuity EquationDocument8 paginiEsci342 Lesson07 Continuity EquationMohamed Abd El-MoniemÎncă nu există evaluări
- Barotropic vorticity equation describedDocument12 paginiBarotropic vorticity equation describedtoura8Încă nu există evaluări
- Stable Manifold TheoremDocument7 paginiStable Manifold TheoremRicardo Miranda MartinsÎncă nu există evaluări
- Level Set MethodDocument38 paginiLevel Set MethodMuhammadArifAzwÎncă nu există evaluări
- Solve first-order PDEs using Charpit's methodDocument85 paginiSolve first-order PDEs using Charpit's methodBarsha RoyÎncă nu există evaluări
- Math3974 2004 ExamDocument5 paginiMath3974 2004 ExamMarcus LiÎncă nu există evaluări
- Staggered Grids PDFDocument13 paginiStaggered Grids PDFkau1986Încă nu există evaluări
- 2009 ExamDocument5 pagini2009 ExamMarcus LiÎncă nu există evaluări
- CH 2 - Wave Propagation in Viscous Fluid PDFDocument20 paginiCH 2 - Wave Propagation in Viscous Fluid PDFRhonda BushÎncă nu există evaluări
- 2014, Article, Modelling High Speed Viscous Flow in OpenFOAMDocument13 pagini2014, Article, Modelling High Speed Viscous Flow in OpenFOAMAnıl KüçükÎncă nu există evaluări
- 2011 - Nonoyama - Performance of The SPH Method For Deformation Analyses of GeomaterialsDocument16 pagini2011 - Nonoyama - Performance of The SPH Method For Deformation Analyses of GeomaterialshdphimxemÎncă nu există evaluări
- Chap4 Fan Noise SimulationDocument7 paginiChap4 Fan Noise Simulationshehbazi2001Încă nu există evaluări
- MAST30030 Assign3 2017Document2 paginiMAST30030 Assign3 2017Jordan MoshcovitisÎncă nu există evaluări
- CFD MomentumDocument20 paginiCFD MomentumSêlvâkûmâr JayabalaÎncă nu există evaluări
- Matrix ManipulatonDocument23 paginiMatrix ManipulatonducthienhuaÎncă nu există evaluări
- Pressure-Velocity Coupling: School of Mechanical Aerospace and Civil EngineeringDocument4 paginiPressure-Velocity Coupling: School of Mechanical Aerospace and Civil EngineeringDebdutta GhoshÎncă nu există evaluări
- ) W !"#$%&' +,-./012345 Ya - Fi Mu: Discounted Properties of Probabilistic Pushdown AutomataDocument33 pagini) W !"#$%&' +,-./012345 Ya - Fi Mu: Discounted Properties of Probabilistic Pushdown Automatasmart_gaurav3097Încă nu există evaluări
- Solution for Chapter 23 causality and transformationsDocument8 paginiSolution for Chapter 23 causality and transformationsSveti JeronimÎncă nu există evaluări
- Correction Equation of The SIMPLE Algorithm: Removal of Temporal and Under-Relaxation Terms From The PressureDocument18 paginiCorrection Equation of The SIMPLE Algorithm: Removal of Temporal and Under-Relaxation Terms From The PressurehlkatkÎncă nu există evaluări
- CFD 5Document19 paginiCFD 5camaradiyaÎncă nu există evaluări
- Variable Separated Solutions and Four-Dromion Excitations For (2+1) - Dimensional Nizhnik Novikov Veselov EquationDocument6 paginiVariable Separated Solutions and Four-Dromion Excitations For (2+1) - Dimensional Nizhnik Novikov Veselov EquationLymesÎncă nu există evaluări
- Classnotes For Classical Control Theory: I. E. K Ose Dept. of Mechanical Engineering Bo Gazici UniversityDocument51 paginiClassnotes For Classical Control Theory: I. E. K Ose Dept. of Mechanical Engineering Bo Gazici UniversityGürkan YamanÎncă nu există evaluări
- Calculatioyjrtfgjdof Revolution With ArbitraryDocument12 paginiCalculatioyjrtfgjdof Revolution With ArbitrarySmileÎncă nu există evaluări
- ρ ρ φ φ z z r r θ θ φ φDocument3 paginiρ ρ φ φ z z r r θ θ φ φRea Jis me21b160Încă nu există evaluări
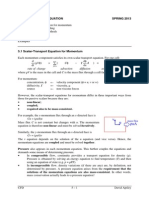
- The Scalar-Transport Equation SPRING 2009: SV A N C V TDocument30 paginiThe Scalar-Transport Equation SPRING 2009: SV A N C V Tvenkatr1Încă nu există evaluări
- Winter School # Finite Volume Method - IDocument35 paginiWinter School # Finite Volume Method - ISreya BanerjeeÎncă nu există evaluări
- Solving Poisson's Equation by Finite DifferencesDocument6 paginiSolving Poisson's Equation by Finite DifferencesEugene LiÎncă nu există evaluări
- The Shallow Water EquationsDocument9 paginiThe Shallow Water EquationsM Usman Bin YounasÎncă nu există evaluări
- CFD Analysis of Hydrodynamic Effects in Horizontal Pneumatic TransportDocument8 paginiCFD Analysis of Hydrodynamic Effects in Horizontal Pneumatic TransportflaviocolmanÎncă nu există evaluări
- Gas Phase Interface ModelingDocument8 paginiGas Phase Interface ModelingL Bryce Whitson JrÎncă nu există evaluări
- 6 - 1 6. Aerodynamics of 3D Lifting SurfaDocument72 pagini6 - 1 6. Aerodynamics of 3D Lifting SurfaSîImoHäāķīīmÎncă nu există evaluări
- MomentumDocument20 paginiMomentumMusa MohammedÎncă nu există evaluări
- Saho KKDocument4 paginiSaho KKMelike EsginÎncă nu există evaluări
- CAPS Technical Note: Acoustic Measurements Theory BasicsDocument26 paginiCAPS Technical Note: Acoustic Measurements Theory BasicslakaviyÎncă nu există evaluări
- Weeks3 4Document25 paginiWeeks3 4Eric ParkerÎncă nu există evaluări
- Equadiff Vienne 2007Document6 paginiEquadiff Vienne 2007hhedfiÎncă nu există evaluări
- Numerical Solutions of The Schrodinger EquationDocument26 paginiNumerical Solutions of The Schrodinger EquationqrrqrbrbrrblbllxÎncă nu există evaluări
- The Oberbeck-Boussinesq Approximation As A Singular Limit of The Full Navier-Stokes-Fourier SystemDocument29 paginiThe Oberbeck-Boussinesq Approximation As A Singular Limit of The Full Navier-Stokes-Fourier SystemSrinivas JangiliÎncă nu există evaluări
- Fluid-structure interaction domain decomposition frameworkDocument18 paginiFluid-structure interaction domain decomposition frameworkHDYangÎncă nu există evaluări
- Characteristic-Based Schemes For The Euler Equations: P. L. RoeDocument30 paginiCharacteristic-Based Schemes For The Euler Equations: P. L. RoeMaria HernándezÎncă nu există evaluări
- 1 s2.0 S0022247X07011547 Main PDFDocument13 pagini1 s2.0 S0022247X07011547 Main PDFSaulQuispeTaipeÎncă nu există evaluări
- Error Propagation of General Linear Methods For Ordinary Differential EquationsDocument21 paginiError Propagation of General Linear Methods For Ordinary Differential EquationsKarangano Kamaraju Castro ChavezÎncă nu există evaluări
- 2006RGDDocument6 pagini2006RGDNam LeÎncă nu există evaluări
- Crash Course On VectorsDocument40 paginiCrash Course On VectorsjdoflaÎncă nu există evaluări
- Forced Axial Flow Between Rotating Concentric Cylinders: CitationDocument14 paginiForced Axial Flow Between Rotating Concentric Cylinders: CitationPrabal AcharyaÎncă nu există evaluări
- Finite Volume Method For Transonic Potential Flow CalculationsDocument28 paginiFinite Volume Method For Transonic Potential Flow Calculationskevin ostos julcaÎncă nu există evaluări
- Application of The Monte Carlo Method To The Solution of Heat Transfer Problem in NanofluidsDocument8 paginiApplication of The Monte Carlo Method To The Solution of Heat Transfer Problem in NanofluidsMuhFachrulÎncă nu există evaluări
- Thrust Vector Control by Flexible Nozzle and Secondary Fluid InjectionDocument10 paginiThrust Vector Control by Flexible Nozzle and Secondary Fluid InjectionPurushothamanÎncă nu există evaluări
- Generalized_Darcys_Law_in_Filtration_TheoryDocument4 paginiGeneralized_Darcys_Law_in_Filtration_TheoryignacioÎncă nu există evaluări
- Direct numerical simulation of particle detachmentDocument14 paginiDirect numerical simulation of particle detachmentAntonio Martín AlcántaraÎncă nu există evaluări
- Gui-Qiang G. Chen - Multidimensional Conservation Laws: Overview, Problems, and PerspectiveDocument44 paginiGui-Qiang G. Chen - Multidimensional Conservation Laws: Overview, Problems, and PerspectiveQMDhidnwÎncă nu există evaluări
- Intro To Aircraft PropulsionDocument12 paginiIntro To Aircraft PropulsionAndy TranÎncă nu există evaluări
- ps2 PDFDocument4 paginips2 PDFOmar SaeedÎncă nu există evaluări
- CFD Methods GuideDocument8 paginiCFD Methods Guidemanu2958Încă nu există evaluări
- Usa Easa 145Document31 paginiUsa Easa 145Surya VenkatÎncă nu există evaluări
- As 1769-1975 Welded Stainless Steel Tubes For Plumbing ApplicationsDocument6 paginiAs 1769-1975 Welded Stainless Steel Tubes For Plumbing ApplicationsSAI Global - APACÎncă nu există evaluări
- Railway RRB Group D Book PDFDocument368 paginiRailway RRB Group D Book PDFAshish mishraÎncă nu există evaluări
- Denial and AR Basic Manual v2Document31 paginiDenial and AR Basic Manual v2Calvin PatrickÎncă nu există evaluări
- Create A Gmail Account in Some Simple StepsDocument9 paginiCreate A Gmail Account in Some Simple Stepsptjain02Încă nu există evaluări
- Installing and Registering FSUIPCDocument7 paginiInstalling and Registering FSUIPCKAPTAN XÎncă nu există evaluări
- Empowerment Technologies Learning ActivitiesDocument7 paginiEmpowerment Technologies Learning ActivitiesedzÎncă nu există evaluări
- Lorilie Muring ResumeDocument1 paginăLorilie Muring ResumeEzekiel Jake Del MundoÎncă nu există evaluări
- Diana's Innermost House: MagazineDocument42 paginiDiana's Innermost House: MagazinealexgoagaÎncă nu există evaluări
- Excavator Loading To Truck TrailerDocument12 paginiExcavator Loading To Truck TrailerThy RonÎncă nu există evaluări
- FEM Lecture Notes-2Document18 paginiFEM Lecture Notes-2macynthia26Încă nu există evaluări
- Organisation Study Report On Star PVC PipesDocument16 paginiOrganisation Study Report On Star PVC PipesViswa Keerthi100% (1)
- EDI810Document11 paginiEDI810ramcheran2020Încă nu există evaluări
- BlueDocument18 paginiBluekarishma nairÎncă nu există evaluări
- Globalisation - Theories of Digital CommunicationDocument12 paginiGlobalisation - Theories of Digital CommunicationDiya Patel-10SÎncă nu există evaluări
- CCT AsqDocument12 paginiCCT Asqlcando100% (1)
- UKIERI Result Announcement-1Document2 paginiUKIERI Result Announcement-1kozhiiiÎncă nu există evaluări
- Mini Ice Plant Design GuideDocument4 paginiMini Ice Plant Design GuideDidy RobotIncorporatedÎncă nu există evaluări
- WELDING EQUIPMENT CALIBRATION STATUSDocument4 paginiWELDING EQUIPMENT CALIBRATION STATUSAMIT SHAHÎncă nu există evaluări
- CST Jabber 11.0 Lab GuideDocument257 paginiCST Jabber 11.0 Lab GuideHải Nguyễn ThanhÎncă nu există evaluări
- Chapter 2a Non Structured DataRozianiwatiDocument43 paginiChapter 2a Non Structured DataRozianiwatiNur AnisaÎncă nu există evaluări
- Banas Dairy ETP Training ReportDocument38 paginiBanas Dairy ETP Training ReportEagle eye0% (2)
- High Altitude Compensator Manual 10-2011Document4 paginiHigh Altitude Compensator Manual 10-2011Adem NuriyeÎncă nu există evaluări
- Fabric Bursting StrengthDocument14 paginiFabric Bursting StrengthQaiseriqball100% (5)
- Beams On Elastic Foundations TheoryDocument15 paginiBeams On Elastic Foundations TheoryCharl de Reuck100% (1)
- Sample Property Management AgreementDocument13 paginiSample Property Management AgreementSarah TÎncă nu există evaluări
- Material Properties L2 Slides and NotesDocument41 paginiMaterial Properties L2 Slides and NotesjohnÎncă nu există evaluări
- Green Management: Nestlé's Approach To Green Management 1. Research and DevelopmentDocument6 paginiGreen Management: Nestlé's Approach To Green Management 1. Research and DevelopmentAbaidullah TanveerÎncă nu există evaluări
- Self-Assessment On Accountability: I. QuestionsDocument2 paginiSelf-Assessment On Accountability: I. QuestionsAjit Kumar SahuÎncă nu există evaluări
- Discursive Closure and Discursive Openings in SustainabilityDocument10 paginiDiscursive Closure and Discursive Openings in SustainabilityRenn MÎncă nu există evaluări