S-ar putea să vă placă și
- Nonlinear Control Feedback Linearization Sliding Mode ControlDe la EverandNonlinear Control Feedback Linearization Sliding Mode ControlÎncă nu există evaluări
- Control System Lab Exercise PDFDocument59 paginiControl System Lab Exercise PDFilijakljÎncă nu există evaluări
- Controls Problems For Qualifying Exam - Spring 2014: Problem 1Document11 paginiControls Problems For Qualifying Exam - Spring 2014: Problem 1MnshÎncă nu există evaluări
- Tut 5Document4 paginiTut 5Aakriti VermaÎncă nu există evaluări
- 1 Lyapunov Stability TheoryDocument11 pagini1 Lyapunov Stability TheoryajmaltkÎncă nu există evaluări
- 07-Lyapunov Stability TheoryDocument11 pagini07-Lyapunov Stability TheoryNiyo MosesÎncă nu există evaluări
- Lefeber Nijmeijer 1997Document13 paginiLefeber Nijmeijer 1997Alejandra OrellanaÎncă nu există evaluări
- CH 4Document26 paginiCH 4Keneni AlemayehuÎncă nu există evaluări
- Automatic Control III Homework Assignment 3 2015Document4 paginiAutomatic Control III Homework Assignment 3 2015salimÎncă nu există evaluări
- 01 IntroDocument28 pagini01 Introsouvik5000Încă nu există evaluări
- Slides Control System 2Document13 paginiSlides Control System 2Eric GardnerÎncă nu există evaluări
- Linear State FeedbackDocument3 paginiLinear State FeedbackRehman SaleemÎncă nu există evaluări
- Transfer Functions: Student Report Mahmoud Mohamed KhodeirDocument9 paginiTransfer Functions: Student Report Mahmoud Mohamed Khodeirالبياتي محمدÎncă nu există evaluări
- FrA02 1Document6 paginiFrA02 1adizzlydawg6969Încă nu există evaluări
- Stability 2004Document4 paginiStability 2004andrestomasÎncă nu există evaluări
- Balanced TruncationDocument15 paginiBalanced TruncationVineet KoundalÎncă nu există evaluări
- Anfis VignetteDocument21 paginiAnfis VignetteWang ZheÎncă nu există evaluări
- 2CE 611-Expansion Theorem and Free Response From MODE Superposition MethodDocument7 pagini2CE 611-Expansion Theorem and Free Response From MODE Superposition MethodRoshni TÎncă nu există evaluări
- Automatic Control Basic Course: Exercises 2021Document124 paginiAutomatic Control Basic Course: Exercises 2021Duc-Duy Pham NguyenÎncă nu există evaluări
- Lab#1 Sampling and Quantization Objectives:: Communication II Lab (EELE 4170)Document6 paginiLab#1 Sampling and Quantization Objectives:: Communication II Lab (EELE 4170)MarteÎncă nu există evaluări
- Generic Hop F BifurcationDocument25 paginiGeneric Hop F BifurcationFernandoFierroGonzalezÎncă nu există evaluări
- Week 9 Labview: "Numerical Solution of A Second-Order Linear Ode"Document5 paginiWeek 9 Labview: "Numerical Solution of A Second-Order Linear Ode"Michael LiÎncă nu există evaluări
- Control Lecture 8 Poles Performance and StabilityDocument20 paginiControl Lecture 8 Poles Performance and StabilitySabine Brosch100% (1)
- Fault Tolerant Process Control c2Document21 paginiFault Tolerant Process Control c2augur886Încă nu există evaluări
- Control Systems PDFDocument24 paginiControl Systems PDFlum_78Încă nu există evaluări
- Art I Go CN Mac 2024 Armando VelasquezDocument7 paginiArt I Go CN Mac 2024 Armando VelasquezMaria Luisa Velasquez VelasquezÎncă nu există evaluări
- Mathematic Modelling of Dynamic SYSTEMS Ch. 2Document31 paginiMathematic Modelling of Dynamic SYSTEMS Ch. 2Irtiza IshrakÎncă nu există evaluări
- Thuật Toán Điều Khiển1Document23 paginiThuật Toán Điều Khiển1Văn Nghĩa NguyễnÎncă nu există evaluări
- Nonlinear DynamicsDocument84 paginiNonlinear DynamicsMilad S. HaghighiÎncă nu există evaluări
- ESE 500 Homework3 PDFDocument4 paginiESE 500 Homework3 PDFforante3Încă nu există evaluări
- 24 Feedback LinearizationDocument17 pagini24 Feedback LinearizationaustinvishalÎncă nu există evaluări
- Stability Theory For Nonlinear Systems: Giuseppe OrioloDocument47 paginiStability Theory For Nonlinear Systems: Giuseppe OriolomaryamÎncă nu există evaluări
- Chapter 1 IntroductionDocument32 paginiChapter 1 IntroductionYucheng XiangÎncă nu există evaluări
- ExsamlDocument58 paginiExsamlAsanga JayawardanaÎncă nu există evaluări
- Properties of MIMO LTI SystemsDocument8 paginiProperties of MIMO LTI SystemsTom KigeziÎncă nu există evaluări
- ECE 425 - General QuestionsDocument15 paginiECE 425 - General QuestionsAmos AtandiÎncă nu există evaluări
- Exercise 1 2018Document5 paginiExercise 1 2018Trungtin Bui DucÎncă nu există evaluări
- Chapter 4Document39 paginiChapter 4Joseph IbrahimÎncă nu există evaluări
- DawdawdDocument6 paginiDawdawdKharolina BautistaÎncă nu există evaluări
- Chapter1 Nonlinear Systems TempDocument8 paginiChapter1 Nonlinear Systems TempahmedÎncă nu există evaluări
- Nonlinear Control and Servo SystemsDocument74 paginiNonlinear Control and Servo SystemsshivnairÎncă nu există evaluări
- Advanced Engineering Mathematics Si Edition 8th Edition Oneil Solutions Manual Full Chapter PDFDocument33 paginiAdvanced Engineering Mathematics Si Edition 8th Edition Oneil Solutions Manual Full Chapter PDFSandraMurraykean100% (14)
- Exercises PrintDocument124 paginiExercises Printusr_kotoÎncă nu există evaluări
- Lecture 4: Use of Symmetry & Skewed SupportsDocument10 paginiLecture 4: Use of Symmetry & Skewed SupportsRamachandra ReddyÎncă nu există evaluări
- Linear SystemsDocument44 paginiLinear SystemsrajuvadlakondaÎncă nu există evaluări
- Mathematical PreliminariesDocument14 paginiMathematical PreliminariesSanchez Resendiz BonifacioÎncă nu există evaluări
- Solving Optimal Control Problems With MATLABDocument21 paginiSolving Optimal Control Problems With MATLABxarthrÎncă nu există evaluări
- Comparison of LQRDocument6 paginiComparison of LQRʚɞ Kwon Boa ʚɞÎncă nu există evaluări
- Comparison of LQR and PD Controller For Stabilizing Double Inverted Pendulum SystemDocument6 paginiComparison of LQR and PD Controller For Stabilizing Double Inverted Pendulum SystemIJERDÎncă nu există evaluări
- Problems and SolutionsDocument13 paginiProblems and SolutionsJason ChiangÎncă nu există evaluări
- Inverted PendulumDocument10 paginiInverted PendulumShahday BhaiÎncă nu există evaluări
- Poles Selection TheoryDocument6 paginiPoles Selection TheoryRao ZubairÎncă nu există evaluări
- 1 Bartoszewicz PlenaryDocument8 pagini1 Bartoszewicz Plenarysomaj shrivastavaÎncă nu există evaluări
- Transform Analysis of LTI SystemsDocument62 paginiTransform Analysis of LTI Systemshakkem bÎncă nu există evaluări
- STRC201 Sdof JMWB PDFDocument99 paginiSTRC201 Sdof JMWB PDFAkash ChandraÎncă nu există evaluări
- 1 Single Degree of Freedom (SDOF) Systems: James MW Brownjohn, University of Plymouth, January 2005Document99 pagini1 Single Degree of Freedom (SDOF) Systems: James MW Brownjohn, University of Plymouth, January 2005Amandeep SinghÎncă nu există evaluări
- Midterm Review Cds 101Document4 paginiMidterm Review Cds 101Cristhian DelgadoÎncă nu există evaluări
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99De la EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99Încă nu există evaluări
- Elementary Differential Equations with Linear AlgebraDe la EverandElementary Differential Equations with Linear AlgebraÎncă nu există evaluări
- BS 07533-3-1997Document21 paginiBS 07533-3-1997Ali RayyaÎncă nu există evaluări
- Gauss' Law: F A FADocument14 paginiGauss' Law: F A FAValentina DuarteÎncă nu există evaluări
- Ahmed Amr P2Document8 paginiAhmed Amr P2Ahmed AmrÎncă nu există evaluări
- Case Paul Foster Highlights of TarotDocument76 paginiCase Paul Foster Highlights of TarotTraditionaltarot100% (6)
- History Homework Help Ks3Document8 paginiHistory Homework Help Ks3afetnjvog100% (1)
- OOPS KnowledgeDocument47 paginiOOPS KnowledgeLakshmanÎncă nu există evaluări
- WAM ES Screw Conveyors Manual JECDocument43 paginiWAM ES Screw Conveyors Manual JECabbas tawbiÎncă nu există evaluări
- Handbook+for+Participants+ +GCC+TeenDocument59 paginiHandbook+for+Participants+ +GCC+Teenchloe.2021164Încă nu există evaluări
- Power Quality Lab Manual (EE-801)Document12 paginiPower Quality Lab Manual (EE-801)ASHU KÎncă nu există evaluări
- Anth 09 3 247 07 386 Yadav V S TTDocument3 paginiAnth 09 3 247 07 386 Yadav V S TTShishir NigamÎncă nu există evaluări
- Video Tutorial: Machine Learning 17CS73Document27 paginiVideo Tutorial: Machine Learning 17CS73Mohammed Danish100% (2)
- Describe an English lesson you enjoyed.: 多叔逻辑口语,中国雅思口语第一品牌 公共微信: ddielts 新浪微博@雅思钱多多Document7 paginiDescribe an English lesson you enjoyed.: 多叔逻辑口语,中国雅思口语第一品牌 公共微信: ddielts 新浪微博@雅思钱多多Siyeon YeungÎncă nu există evaluări
- U2 LO An Invitation To A Job Interview Reading - Pre-Intermediate A2 British CounciDocument6 paginiU2 LO An Invitation To A Job Interview Reading - Pre-Intermediate A2 British CounciELVIN MANUEL CONDOR CERVANTESÎncă nu există evaluări
- Sentence Diagramming:: Prepositional PhrasesDocument2 paginiSentence Diagramming:: Prepositional PhrasesChristylle RomeaÎncă nu există evaluări
- RHB Islamic Bank BerhadDocument2 paginiRHB Islamic Bank BerhadVape Hut KlangÎncă nu există evaluări
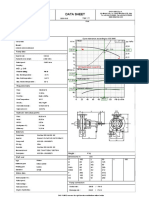
- Data Sheet: Item N°: Curve Tolerance According To ISO 9906Document3 paginiData Sheet: Item N°: Curve Tolerance According To ISO 9906Aan AndianaÎncă nu există evaluări
- EE360 - Magnetic CircuitsDocument48 paginiEE360 - Magnetic Circuitsبدون اسمÎncă nu există evaluări
- WallthicknessDocument1 paginăWallthicknessGabriela MotaÎncă nu există evaluări
- Libro INGLÉS BÁSICO IDocument85 paginiLibro INGLÉS BÁSICO IRandalHoyos100% (1)
- ADAMS/View Function Builder: Run-Time FunctionsDocument185 paginiADAMS/View Function Builder: Run-Time FunctionsSrinivasarao YenigallaÎncă nu există evaluări
- Harmony Guide DatabaseDocument7 paginiHarmony Guide DatabaseAya SakamotoÎncă nu există evaluări
- Abstract Cohort 1 Clin Psych FZ 20220323Document31 paginiAbstract Cohort 1 Clin Psych FZ 20220323Azizah OthmanÎncă nu există evaluări
- DLP - CO#1-for PandemicDocument4 paginiDLP - CO#1-for PandemicEvelyn CanoneraÎncă nu există evaluări
- Grimm (2015) WisdomDocument17 paginiGrimm (2015) WisdomBruce WayneÎncă nu există evaluări
- AnimDessin2 User Guide 01Document2 paginiAnimDessin2 User Guide 01rendermanuser100% (1)
- FoundationDocument98 paginiFoundationManognya KotaÎncă nu există evaluări
- The Adoption of e Procurement in Tanzani PDFDocument5 paginiThe Adoption of e Procurement in Tanzani PDFDangyi GodSeesÎncă nu există evaluări
- SL 4001Document2 paginiSL 4001ardiÎncă nu există evaluări
- All Papers of Thermodyanmics and Heat TransferDocument19 paginiAll Papers of Thermodyanmics and Heat TransfervismayluhadiyaÎncă nu există evaluări
- Florida Motor Fuel Tax Relief Act of 2022Document9 paginiFlorida Motor Fuel Tax Relief Act of 2022ABC Action NewsÎncă nu există evaluări