S-ar putea să vă placă și
- Mate PDFDocument22 paginiMate PDFValentina AsanzaÎncă nu există evaluări
- Ve RPDocument8 paginiVe RPhp8716728Încă nu există evaluări
- Cálculo avanzado para ingeniería en nanotecnologíaDocument55 paginiCálculo avanzado para ingeniería en nanotecnologíaJOJOJO jejejeÎncă nu există evaluări
- Preparcial 1Document3 paginiPreparcial 1Jacob NaarÎncă nu există evaluări
- RECTASDocument5 paginiRECTASADOLFO CANAHUIRE CONDORIÎncă nu există evaluări
- Recta R3 PerpendicularDocument10 paginiRecta R3 Perpendiculardannico777Încă nu există evaluări
- Geometria Analitica Del EspacioDocument9 paginiGeometria Analitica Del EspacioJonathan BurgoaÎncă nu există evaluări
- Minicurso LACAR 2017 Herramientas Matematicas PDFDocument47 paginiMinicurso LACAR 2017 Herramientas Matematicas PDFSebastian RodriguezÎncă nu există evaluări
- Ecuaciones paramétricas de rectas y segmentos de recta en el espacioDocument9 paginiEcuaciones paramétricas de rectas y segmentos de recta en el espacioRene CaMeÎncă nu există evaluări
- Sistema de Coordenadas VectoresDocument12 paginiSistema de Coordenadas VectoresGivion WeaverÎncă nu există evaluări
- Resumen Cap5Document15 paginiResumen Cap5WendellÎncă nu există evaluări
- Guia Adicional 2 Rectas y Planos en El Espacio Tridimensional 21-01-2022-1Document24 paginiGuia Adicional 2 Rectas y Planos en El Espacio Tridimensional 21-01-2022-1RojoÎncă nu există evaluări
- Recta en El Plano y Rectas y Plano en El EspacioDocument19 paginiRecta en El Plano y Rectas y Plano en El EspacioFranco MoranÎncă nu există evaluări
- Recta en El Espacio 2015 PDFDocument15 paginiRecta en El Espacio 2015 PDFAlanis FlorenciaÎncă nu există evaluări
- Cálculo Vectorial Capitulo 8: Integrales de SuperficieDocument21 paginiCálculo Vectorial Capitulo 8: Integrales de SuperficieMiguel Flores100% (13)
- Tema 1 - RectasPlanos PDFDocument45 paginiTema 1 - RectasPlanos PDFAlexiÎncă nu există evaluări
- Apuntes Física (Incompletos)Document126 paginiApuntes Física (Incompletos)PabloÎncă nu există evaluări
- ProyectivaDocument14 paginiProyectivagemunu271Încă nu există evaluări
- Ley de HookeDocument9 paginiLey de HookeEmerson NewtonÎncă nu există evaluări
- Diapositivas 4 de Algebra 2 UDECDocument26 paginiDiapositivas 4 de Algebra 2 UDECCristoferLuisMamaniMarinoÎncă nu există evaluări
- Rectas y planos en 3DDocument45 paginiRectas y planos en 3DvalgorÎncă nu există evaluări
- Unidad 3 - Vectores 2020Document17 paginiUnidad 3 - Vectores 2020Samuu BustosÎncă nu există evaluări
- 0 Ideas Basicas Planos RectasDocument4 pagini0 Ideas Basicas Planos Rectas846096 846096Încă nu există evaluări
- Parametrización de superficiesDocument31 paginiParametrización de superficiesCarlos MedranoÎncă nu există evaluări
- Matematicas Cap9Document27 paginiMatematicas Cap9gint94277Încă nu există evaluări
- ConicasDocument21 paginiConicasDenis AcostaÎncă nu există evaluări
- La Recta PDFDocument12 paginiLa Recta PDFjorge pardoÎncă nu există evaluări
- Sistemas de coordenadas cartesianas en R3 y conceptos básicos de vectoresDocument131 paginiSistemas de coordenadas cartesianas en R3 y conceptos básicos de vectoresPablo German TouriñanÎncă nu există evaluări
- Recta Parametrica 1Document9 paginiRecta Parametrica 1Alejandro Hernandez PinedaÎncă nu există evaluări
- 8.1 Beamer Res - Superficie Area Superficie - 2022 - IIDocument62 pagini8.1 Beamer Res - Superficie Area Superficie - 2022 - IIa20222309Încă nu există evaluări
- Planos-22-B 04-11-22Document47 paginiPlanos-22-B 04-11-22RAMIREZ LAYNES OMAR ALEXANDERÎncă nu există evaluări
- Vclase 11 CDIADocument4 paginiVclase 11 CDIANEMESIS ARIANNA VILLAMARIN MENDOZAÎncă nu există evaluări
- Clase1 GeometriaPlano Video1Document68 paginiClase1 GeometriaPlano Video1bet.bilianskyÎncă nu există evaluări
- 6 6 Plano Tangente y Recta NormalDocument5 pagini6 6 Plano Tangente y Recta NormalRenzo LopezÎncă nu există evaluări
- Calculo VectorialDocument69 paginiCalculo VectorialBaphodeathÎncă nu există evaluări
- S6 - Rectas en El EspacioDocument24 paginiS6 - Rectas en El EspacioSheila Maribel Blas LópezÎncă nu există evaluări
- Ecuaciones de rectas y cónicasDocument9 paginiEcuaciones de rectas y cónicasJose PachecoÎncă nu există evaluări
- Ecuación escalar de un plano en el espacio tridimensionalDocument2 paginiEcuación escalar de un plano en el espacio tridimensionalFrancisco Castro HernandezÎncă nu există evaluări
- Espacios vectoriales: definición, propiedades y ejemplosDocument66 paginiEspacios vectoriales: definición, propiedades y ejemploscarlosÎncă nu există evaluări
- CR Coord-PolaresDocument2 paginiCR Coord-PolaresJOSE MANUEL DAVILA MARROUÎncă nu există evaluări
- Lecc 5. Espacios VectorialesDocument18 paginiLecc 5. Espacios VectorialesyoelÎncă nu există evaluări
- 1.3. - Ecuaciones de La Recta y Del PlanoDocument8 pagini1.3. - Ecuaciones de La Recta y Del PlanoIris Eddaly Cruz TrujilloÎncă nu există evaluări
- 2 - Ecuaciones de La Recta y Plano en R3Document32 pagini2 - Ecuaciones de La Recta y Plano en R3Cristina Cristobal EspinozaÎncă nu există evaluări
- ApuntesedpDocument69 paginiApuntesedpBrígida SartiniÎncă nu există evaluări
- Tipos de Ecuaciones de Una Recta y de Un Plano en RDocument29 paginiTipos de Ecuaciones de Una Recta y de Un Plano en RCristhoffer Campos GuerreroÎncă nu există evaluări
- Calculo 02 - Geometria Analitica Del Espacio (Vertical) PDFDocument29 paginiCalculo 02 - Geometria Analitica Del Espacio (Vertical) PDFluisÎncă nu există evaluări
- Cap I - Rectas y PlanosDocument21 paginiCap I - Rectas y PlanosBrandon MaytaÎncă nu există evaluări
- Tema 5 - Geometría Del EspacioDocument30 paginiTema 5 - Geometría Del EspacioAdrián Guerra MarreroÎncă nu există evaluări
- Resumen de La Unidad 2Document12 paginiResumen de La Unidad 2Maria Zambrano BarciaÎncă nu există evaluări
- Microsoft Word - CLASE Nº5Document3 paginiMicrosoft Word - CLASE Nº5anon-100664100% (2)
- BMA0320221 PC04 SolDocument3 paginiBMA0320221 PC04 SolIVAN ESTEBAN PRUDENCIO RAMOSÎncă nu există evaluări
- Coordenadas Polares 2Document70 paginiCoordenadas Polares 2David C. LongobardiÎncă nu există evaluări
- 2 Funciones Variable ComplejaDocument5 pagini2 Funciones Variable ComplejaCARLOS FELIPE SEBASTIAN ALDAVE TORRESÎncă nu există evaluări
- Transformada homogénea y rotaciónDocument18 paginiTransformada homogénea y rotaciónRojas WaldirÎncă nu există evaluări
- FIS Terceros BMDocument9 paginiFIS Terceros BMda_bross0% (1)
- Rectas en El Espacio - s6Document48 paginiRectas en El Espacio - s6Aaron Alexis Paulino DlcÎncă nu există evaluări
- Libro Trigo Parte IIIIIIIIIIIDocument11 paginiLibro Trigo Parte IIIIIIIIIIIFranklinDiazÎncă nu există evaluări
- 9236-Texto Del Artículo-34369-2-10-20170117Document18 pagini9236-Texto Del Artículo-34369-2-10-20170117ChuuÎncă nu există evaluări
- Starter D&D 5 Pre Generados EspañolDocument10 paginiStarter D&D 5 Pre Generados Españolmister02020888% (8)
- Emoción BNDocument1 paginăEmoción BNChuuÎncă nu există evaluări
- Respirar Agua BNDocument1 paginăRespirar Agua BNChuuÎncă nu există evaluări
- Copia BNDocument1 paginăCopia BNChuuÎncă nu există evaluări
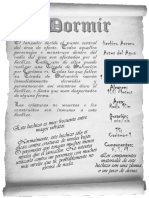
- Dormir BNDocument1 paginăDormir BNChuuÎncă nu există evaluări
- Flecha Ácida BNDocument1 paginăFlecha Ácida BNChuuÎncă nu există evaluări
- Tacticas OrcasDocument2 paginiTacticas OrcasChuuÎncă nu există evaluări
- Confusión BNDocument1 paginăConfusión BNChuuÎncă nu există evaluări
- Página Secreta BNDocument1 paginăPágina Secreta BNChuuÎncă nu există evaluări
- Dormir BNDocument1 paginăDormir BNChuuÎncă nu există evaluări
- Neutralizar Alcohol BNDocument1 paginăNeutralizar Alcohol BNChuuÎncă nu există evaluări
- Chaparrón BNDocument1 paginăChaparrón BNChuuÎncă nu există evaluări
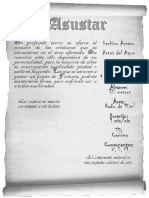
- Asustar BNDocument1 paginăAsustar BNChuuÎncă nu există evaluări
- Copia BN PDFDocument1 paginăCopia BN PDFChuuÎncă nu există evaluări
- Grasa BNDocument1 paginăGrasa BNChuuÎncă nu există evaluări
- Neutralizar Alcohol BNDocument1 paginăNeutralizar Alcohol BNChuuÎncă nu există evaluări
- Derramar BNDocument1 paginăDerramar BNChuuÎncă nu există evaluări
- Dormir BNDocument1 paginăDormir BNChuuÎncă nu există evaluări
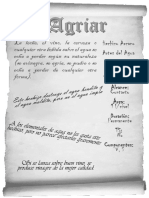
- Agriar BNDocument1 paginăAgriar BNChuuÎncă nu există evaluări
- Aura de Vulnerabilidad BNDocument1 paginăAura de Vulnerabilidad BNChuuÎncă nu există evaluări
- Derramar BNDocument1 paginăDerramar BNChuuÎncă nu există evaluări
- TyM Manual de MonstruosDocument34 paginiTyM Manual de MonstruosGustavo Javier Nava TesoÎncă nu există evaluări
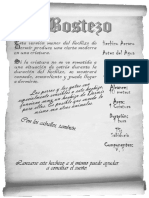
- Bostezo BNDocument1 paginăBostezo BNChuuÎncă nu există evaluări
- (1987) Año Dos 3-4Document22 pagini(1987) Año Dos 3-4ChuuÎncă nu există evaluări
- manualBASE PDFDocument96 paginimanualBASE PDFChuuÎncă nu există evaluări
- Criticos y PifiasDocument7 paginiCriticos y PifiasRuben Cea ContrerasÎncă nu există evaluări
- TyM PDFDocument203 paginiTyM PDFChuuÎncă nu există evaluări
- (1987) Año Dos 1-4Document23 pagini(1987) Año Dos 1-4ChuuÎncă nu există evaluări
- (1987) Año Dos 2-4Document23 pagini(1987) Año Dos 2-4ChuuÎncă nu există evaluări
- Matematicas CalculoDocument180 paginiMatematicas Calculonilvia marcaÎncă nu există evaluări
- Valores Maximos y Minimos de Funciones - Grupo #14Document30 paginiValores Maximos y Minimos de Funciones - Grupo #14Steven RodriguezÎncă nu există evaluări
- Fracci OnesDocument59 paginiFracci OnesJANNETH FERNANDA CARDENASCORDEROÎncă nu există evaluări
- Transformaciones Isométricas y HomoteciasDocument10 paginiTransformaciones Isométricas y HomoteciasLindsay Ulsen BarraÎncă nu există evaluări
- Cálculo 2 - (Grupo b02)Document7 paginiCálculo 2 - (Grupo b02)cristian felipe gil cortesÎncă nu există evaluări
- Solucionario-Geometría-Semana #18Document12 paginiSolucionario-Geometría-Semana #18JIM DALMER RAMIREZ DOMINGUEZÎncă nu există evaluări
- Actividad. Planos, Esferas, Superficies Cilindricas Superficies Cuádricas PDFDocument5 paginiActividad. Planos, Esferas, Superficies Cilindricas Superficies Cuádricas PDFTania CastroÎncă nu există evaluări
- Proyecto Matematicas DiscretasDocument15 paginiProyecto Matematicas DiscretasAngel Luis FloresÎncă nu există evaluări
- Sustentacion Matematicas Semana 7Document16 paginiSustentacion Matematicas Semana 7Wendy GiraldoÎncă nu există evaluări
- Ejercicios Resueltos de ED2 ListasDocument34 paginiEjercicios Resueltos de ED2 ListasKarina ForteÎncă nu există evaluări
- CALCULO - Tema 1 - Carlos Guerrero PDFDocument46 paginiCALCULO - Tema 1 - Carlos Guerrero PDFc3715983Încă nu există evaluări
- Calculo DiferencialDocument6 paginiCalculo DiferencialJuan Esteban Higuera MorenoÎncă nu există evaluări
- Sistema de ecuaciones lineales para resolver corte de cajaDocument2 paginiSistema de ecuaciones lineales para resolver corte de cajaEVELIN SÁNCHEZ REYESÎncă nu există evaluări
- Límites Infinitos. Límites en El Infinito. Límites Exponenciales.Document6 paginiLímites Infinitos. Límites en El Infinito. Límites Exponenciales.JULIO ERNESTO GÓMEZ MENDOZAÎncă nu există evaluări
- Teorema fundamental del cálculo y evaluación de integralesDocument9 paginiTeorema fundamental del cálculo y evaluación de integralesIsmar Méndez PérezÎncă nu există evaluări
- Mpes U2 Ea DavcDocument7 paginiMpes U2 Ea DavcDaniel VillalobosÎncă nu există evaluări
- 1 RadicalesDocument7 pagini1 RadicalesANTONIA JIMENEZ SANTIAGOÎncă nu există evaluări
- La Fraccion Un MegaconceptoDocument13 paginiLa Fraccion Un Megaconceptocarmen muñoz100% (1)
- Deflexión de vigas por método del área de momentosDocument10 paginiDeflexión de vigas por método del área de momentosJuan carlos VelasquezÎncă nu există evaluări
- Informe MatlabDocument15 paginiInforme MatlabAndres BK11Încă nu există evaluări
- Sesión 4 Operadores MatemáticosDocument4 paginiSesión 4 Operadores MatemáticosFreddy Alexys Durand QuispeÎncă nu există evaluări
- Jim GlotonDocument101 paginiJim GlotonmonicaÎncă nu există evaluări
- Ejemplo de Maximos, Minimos y Puntos Silla PDFDocument4 paginiEjemplo de Maximos, Minimos y Puntos Silla PDFdnlfuentesÎncă nu există evaluări
- Parábolas, hipérbolas y elipses: formas geométricasDocument16 paginiParábolas, hipérbolas y elipses: formas geométricasJhon GmbÎncă nu există evaluări
- Algebra Lineal FinalDocument197 paginiAlgebra Lineal FinalEmmanuelMartinezSoteloÎncă nu există evaluări
- Silabo Analisis RealDocument8 paginiSilabo Analisis RealJuan Carlos BroncanotorresÎncă nu există evaluări
- Tema 3 - TriángulosDocument3 paginiTema 3 - TriángulosJosue Zapata CamposÎncă nu există evaluări
- Optimización no lineal y aplicaciones económicasDocument181 paginiOptimización no lineal y aplicaciones económicasLele ́s ImpresionesÎncă nu există evaluări
- Funciones LinealesDocument1 paginăFunciones LinealesMiss CeliÎncă nu există evaluări
- Límite de Una Función, Definición y Teoremas.Document10 paginiLímite de Una Función, Definición y Teoremas.GianÎncă nu există evaluări