S-ar putea să vă placă și
- Starting Dengan ReostadDocument5 paginiStarting Dengan ReostadTonoTonyÎncă nu există evaluări
- Hyponic Savings Calculator: Name: Company: Quote #Document6 paginiHyponic Savings Calculator: Name: Company: Quote #Ceric AdiÎncă nu există evaluări
- GOOD Gear Calculations Rev MEDocument5 paginiGOOD Gear Calculations Rev MEAndi SumantriÎncă nu există evaluări
- POwise Monthly Trend-205206207Document1 paginăPOwise Monthly Trend-205206207MKPashaPashaÎncă nu există evaluări
- Libro 1Document615 paginiLibro 1Anonymous yHoduw4Încă nu există evaluări
- Lrs Resistencia Liquid StarterDocument45 paginiLrs Resistencia Liquid StarterQ Llanos HenryÎncă nu există evaluări
- PWR Savings - Opex&Capex 2014-16 KK& FG - Rev04 - 22sept 2014Document17 paginiPWR Savings - Opex&Capex 2014-16 KK& FG - Rev04 - 22sept 2014Shivesh RanjanÎncă nu există evaluări
- Cement Process Engineering Vade Mecum: 2. StatisticsDocument15 paginiCement Process Engineering Vade Mecum: 2. StatisticsVictorAndresMillaSalazarÎncă nu există evaluări
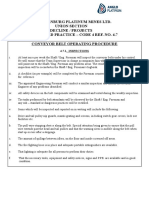
- 4.7 Conveyor Belt Operating ProcedureDocument3 pagini4.7 Conveyor Belt Operating Procedurejohnson OlubiÎncă nu există evaluări
- WBS Template ProjectManagerDocument12 paginiWBS Template ProjectManagerZakaria Elgamri YoutuberÎncă nu există evaluări
- Shedule Work: Proyek Jasa Konstruksi Revitalisasi Terminal LPG Arun (Rtla) Lhokseumawe, AcehDocument1 paginăShedule Work: Proyek Jasa Konstruksi Revitalisasi Terminal LPG Arun (Rtla) Lhokseumawe, AcehEdy D'archee100% (1)
- TNL46Document6 paginiTNL46Adi MohammedÎncă nu există evaluări
- Structural Design and Erection: General RequirementsDocument15 paginiStructural Design and Erection: General RequirementsMKPashaPashaÎncă nu există evaluări
- Line II KPI 02-07-2021Document27 paginiLine II KPI 02-07-2021Raahi NoorÎncă nu există evaluări
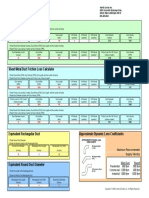
- Flexible Duct Friction Loss CalculatorDocument1 paginăFlexible Duct Friction Loss CalculatorThinh TranÎncă nu există evaluări
- Energy ManagementDocument72 paginiEnergy ManagementAnudeep ChittluriÎncă nu există evaluări
- Binani Cement PDFDocument24 paginiBinani Cement PDFZahir KhiraÎncă nu există evaluări
- 11KV Og FDR-2Document2 pagini11KV Og FDR-2Sathi Reddy ThondapuÎncă nu există evaluări
- M.P.Singh & B.K.Singh Coal Mill CCR 27/03/06 Mill Operation: Observer's Name: Location: Date: ActivityDocument2 paginiM.P.Singh & B.K.Singh Coal Mill CCR 27/03/06 Mill Operation: Observer's Name: Location: Date: Activitysaji kumarÎncă nu există evaluări
- Norm 4Document2 paginiNorm 4Bùi Hắc HảiÎncă nu există evaluări
- 06-SOP For Belt Conveyor 4ABDocument14 pagini06-SOP For Belt Conveyor 4ABTamil VananÎncă nu există evaluări
- Thermography Report: Lucky Mining CoDocument9 paginiThermography Report: Lucky Mining CopithipithÎncă nu există evaluări
- Belt Sway Switch-Nasik R1-Final Sent On 04.01.11Document4 paginiBelt Sway Switch-Nasik R1-Final Sent On 04.01.11atulbhogare7Încă nu există evaluări
- 01 Belt Con ZTB2 WDocument2 pagini01 Belt Con ZTB2 WBùi Hắc HảiÎncă nu există evaluări
- 628-SCR#2 BUCKET BOLT TIGHTENING and CHANGINGDocument4 pagini628-SCR#2 BUCKET BOLT TIGHTENING and CHANGINGBuddy HartÎncă nu există evaluări
- Nema Motor Data CalculatorDocument21 paginiNema Motor Data CalculatorMohammed Abdul JabbarÎncă nu există evaluări
- Design Features and Commissioning of The 700 MW Coal-Fired BoilerDocument5 paginiDesign Features and Commissioning of The 700 MW Coal-Fired Boilervijayk1968100% (1)
- Packaging Equipment ROI Calculator v2018Document4 paginiPackaging Equipment ROI Calculator v2018pangregisterlang99Încă nu există evaluări
- ICAS Initial-Capacity-Assessment-Sheet 2010-12-09Document15 paginiICAS Initial-Capacity-Assessment-Sheet 2010-12-09Fitzi ShadyÎncă nu există evaluări
- Pdca ExampleDocument1 paginăPdca Examplerahul kavirajÎncă nu există evaluări
- ABB Drive and Motor Selector ACS880-04 Module PDFDocument3 paginiABB Drive and Motor Selector ACS880-04 Module PDFBataa BatsuuriÎncă nu există evaluări
- 1 Starting Time Calculation 2Document15 pagini1 Starting Time Calculation 2Sankalp MittalÎncă nu există evaluări
- Improving Weigh Feeder Control Using Scale Location CompensationDocument7 paginiImproving Weigh Feeder Control Using Scale Location CompensationabcÎncă nu există evaluări
- 320102cB SMAW-B - 1Document32 pagini320102cB SMAW-B - 1Syaifur RohmanÎncă nu există evaluări
- MINAS BLinfomationDocument7 paginiMINAS BLinfomationmashudi_fikriÎncă nu există evaluări
- Preventive Maintenance ManualDocument60 paginiPreventive Maintenance ManualAlfredo LopezÎncă nu există evaluări
- Book 1 Updraft Gasifier 2012Document102 paginiBook 1 Updraft Gasifier 2012Acerz VillagraciaÎncă nu există evaluări
- ACL - EP - GU - Part VI B1 Design Criteria and Technical Specification For Control & InstrumentationDocument101 paginiACL - EP - GU - Part VI B1 Design Criteria and Technical Specification For Control & Instrumentationvsrikala68Încă nu există evaluări
- Equip. Name:-RAW MILL Equip. TAG No. 300 RM-1Document1 paginăEquip. Name:-RAW MILL Equip. TAG No. 300 RM-1vinodsnÎncă nu există evaluări
- Loop 1 Loop Loop Loop Loop Loop Loop Loop Loop: DMP-B01-B54814-2 DMP-B01-B54814-2Document86 paginiLoop 1 Loop Loop Loop Loop Loop Loop Loop Loop: DMP-B01-B54814-2 DMP-B01-B54814-2Rakesh Karan SinghÎncă nu există evaluări
- Design Guide For Air Slide ConveyorDocument4 paginiDesign Guide For Air Slide Conveyordoh16810% (1)
- Sine Wave FiltreDocument49 paginiSine Wave FiltreozgurvegencÎncă nu există evaluări
- PM For Fly Ash Dry SystemDocument31 paginiPM For Fly Ash Dry SystemSonratÎncă nu există evaluări
- Planning Schedule Kiln Shutdown July 2016Document2 paginiPlanning Schedule Kiln Shutdown July 2016Arnold StevenÎncă nu există evaluări
- Running Insp Sheet NewDocument20 paginiRunning Insp Sheet NewSafrin SangiaÎncă nu există evaluări
- Army Welfare Trust Nizampur Cement Plant: Electrical DepartmentDocument18 paginiArmy Welfare Trust Nizampur Cement Plant: Electrical Departmentshani5573Încă nu există evaluări
- Bbci Process InterlocksDocument37 paginiBbci Process InterlocksherwinÎncă nu există evaluări
- New Hardware Grinding Aid - ECOFORDocument5 paginiNew Hardware Grinding Aid - ECOFORlovjnxÎncă nu există evaluări
- ABB Motors Starting Curves and Generators: Load Characteristics (IEC 60034-2-1:2007) Data Based On Situation 2/25/2011Document1 paginăABB Motors Starting Curves and Generators: Load Characteristics (IEC 60034-2-1:2007) Data Based On Situation 2/25/2011Antonius DickyÎncă nu există evaluări
- FGD Project at 2X 525 MW MPL: Document Title: Gypsum Storage Shed Sizing CalculationDocument1 paginăFGD Project at 2X 525 MW MPL: Document Title: Gypsum Storage Shed Sizing CalculationPiyush MalviyaÎncă nu există evaluări
- Conveyor BeltsDocument38 paginiConveyor BeltsThitikorn WassanarpheernphongÎncă nu există evaluări
- Project Prafful Company / Customer 10088D2000 CommentDocument830 paginiProject Prafful Company / Customer 10088D2000 CommentAnish SinghÎncă nu există evaluări
- CCS InterconnectionDocument16 paginiCCS InterconnectionAtiq Ur RehmanÎncă nu există evaluări
- 022.2322.2000 Me 0 GBDocument132 pagini022.2322.2000 Me 0 GBUyang Sahroena100% (1)
- Dartford Electrical Energy Survey Report Rev FDocument54 paginiDartford Electrical Energy Survey Report Rev Fmirali74Încă nu există evaluări
- A04 Signal Cable Schedule (Field JB RIO)Document2 paginiA04 Signal Cable Schedule (Field JB RIO)Rakesh Karan SinghÎncă nu există evaluări
- Pump VFD ES EstimatorDocument2 paginiPump VFD ES EstimatorVeeresh MustapureÎncă nu există evaluări
- Homework #2 Notes: ECEN 474Document9 paginiHomework #2 Notes: ECEN 474DanÎncă nu există evaluări
- Gmid RuidaDocument7 paginiGmid Ruida謝政谷Încă nu există evaluări
- Gmid RuidaDocument7 paginiGmid Ruidapes68Încă nu există evaluări
- Queries - Project Logistic Tarahan - MY - GENDocument3 paginiQueries - Project Logistic Tarahan - MY - GENAnonymous DQ4wYUmÎncă nu există evaluări
- Roll CrushersDocument13 paginiRoll CrushersAnonymous DQ4wYUmÎncă nu există evaluări
- Roll Crushers PDFDocument5 paginiRoll Crushers PDFAnonymous DQ4wYUmÎncă nu există evaluări
- M 275 ContentDocument40 paginiM 275 ContentAnonymous DQ4wYUmÎncă nu există evaluări
- ECO1Document3 paginiECO1Anonymous DQ4wYUmÎncă nu există evaluări
- Tabel9 6Document5 paginiTabel9 6Anonymous DQ4wYUmÎncă nu există evaluări
- Pipe LayerDocument8 paginiPipe LayerAnonymous DQ4wYUmÎncă nu există evaluări
- Calculation of Key Parameters Roller of The CrusherDocument3 paginiCalculation of Key Parameters Roller of The CrusherAnonymous DQ4wYUm100% (2)
- Dynamics of Circular MotionDocument35 paginiDynamics of Circular MotionEmmaren SabridoÎncă nu există evaluări
- Sample Paper-01 Physics (Theory) Class - XI Time Allowed: 3 Hours Maximum Marks: 70 General InstructionsDocument3 paginiSample Paper-01 Physics (Theory) Class - XI Time Allowed: 3 Hours Maximum Marks: 70 General InstructionsShekhar kumarÎncă nu există evaluări
- Design Projects-Dynamics PDFDocument9 paginiDesign Projects-Dynamics PDFKHAKSAR0% (1)
- Undergraduate Lecture Notes in PhysicsDocument18 paginiUndergraduate Lecture Notes in Physicspangolin_79Încă nu există evaluări
- 103 F 05 Exam 1Document7 pagini103 F 05 Exam 1Raufzha AnandaÎncă nu există evaluări
- JMC iHSV57-30 User Manual PDFDocument24 paginiJMC iHSV57-30 User Manual PDFvictor rodriguezÎncă nu există evaluări
- Electric Field and Forces Simulation - Logan HelderDocument6 paginiElectric Field and Forces Simulation - Logan Helderapi-319715886Încă nu există evaluări
- Jayshree Periwal International School: Sub.: Physics Topic: KinematicsDocument33 paginiJayshree Periwal International School: Sub.: Physics Topic: KinematicsAryan SinghÎncă nu există evaluări
- Isaac Newton EssayDocument20 paginiIsaac Newton Essayapi-273419849Încă nu există evaluări
- 3.1 Newton's Laws of Motion: 3.1.1 Mass & WeightDocument31 pagini3.1 Newton's Laws of Motion: 3.1.1 Mass & Weighttatenda gumboÎncă nu există evaluări
- Physics Numericals: STD XII SciDocument7 paginiPhysics Numericals: STD XII SciSagarÎncă nu există evaluări
- Science: Quarter 4, Wk2 - Module 2Document31 paginiScience: Quarter 4, Wk2 - Module 2Arthur Capawing45% (11)
- Relative MotionDocument23 paginiRelative MotionkvinzonÎncă nu există evaluări
- Exoskeleton Power and Torque Requirements Based On Human BiomechanicsDocument54 paginiExoskeleton Power and Torque Requirements Based On Human Biomechanicsja2ja1Încă nu există evaluări
- PHYA10 - Physics I (Physical Sciences) Practical Worksheet #05Document2 paginiPHYA10 - Physics I (Physical Sciences) Practical Worksheet #05Sabine MohamadÎncă nu există evaluări
- PHYS111 Ch3 Motion in A PlaneDocument49 paginiPHYS111 Ch3 Motion in A PlaneiqbalÎncă nu există evaluări
- 9th Physics Full Book McqsDocument30 pagini9th Physics Full Book Mcqssky.blueÎncă nu există evaluări
- E105Document10 paginiE105Kenneth PeraÎncă nu există evaluări
- Mechanical Vibration CEPDocument15 paginiMechanical Vibration CEPUsMan WarraichÎncă nu există evaluări
- Chassis AnalysisDocument11 paginiChassis AnalysisDaani OloraÎncă nu există evaluări
- KinematicsDocument46 paginiKinematicsIlayda AltayÎncă nu există evaluări
- Lab Report Cen Force - 1Document5 paginiLab Report Cen Force - 1api-257247956Încă nu există evaluări
- Lesson 8 Gravity Mass and WeightDocument24 paginiLesson 8 Gravity Mass and WeightAhmed Hany ElGezawyÎncă nu există evaluări
- Table of Specification 1 Semester/ 2 Quarterly Assessment Grade 12 Subject: Physical ScienceDocument5 paginiTable of Specification 1 Semester/ 2 Quarterly Assessment Grade 12 Subject: Physical ScienceArlance Sandra Marie MedinaÎncă nu există evaluări
- Dynamic AnalysisDocument16 paginiDynamic AnalysisStella PinkÎncă nu există evaluări
- UR ScriptManual 3.15.4Document127 paginiUR ScriptManual 3.15.4Ise KooijÎncă nu există evaluări
- WWW - Ib.academy: Study GuideDocument122 paginiWWW - Ib.academy: Study GuideHendrikEspinozaLoyola100% (2)
- Acceleration Due To GravityDocument18 paginiAcceleration Due To Gravityjoshua cerialesÎncă nu există evaluări
- Lesson Plan Motion in A CircularDocument3 paginiLesson Plan Motion in A CircularADIBAR AHMAD RUDAWANÎncă nu există evaluări
- Group-4'S Report: Leader: Chauncey Dale Pequiña Asst - Leader: Kristofer Cruz Sec - Alliah Garcia Jefel EcleoDocument26 paginiGroup-4'S Report: Leader: Chauncey Dale Pequiña Asst - Leader: Kristofer Cruz Sec - Alliah Garcia Jefel EcleoSheralyne Daz PequinaÎncă nu există evaluări