S-ar putea să vă placă și
- Manual de Estudio Examen CIAAC - 02 - Sistemas de Aeronaves PDFDocument64 paginiManual de Estudio Examen CIAAC - 02 - Sistemas de Aeronaves PDFJuan Manuel Flores ContrerasÎncă nu există evaluări
- NDT Ut - Asme - 002 - 10Document15 paginiNDT Ut - Asme - 002 - 10Jimmy David Espinoza MejiaÎncă nu există evaluări
- Lan Airlines en 2008Document22 paginiLan Airlines en 2008Zona GamaÎncă nu există evaluări
- Obra de TeatroDocument4 paginiObra de TeatroMarieli Red50% (6)
- NDT y NDI pruebas para aeronavesDocument10 paginiNDT y NDI pruebas para aeronavesCami HenaoÎncă nu există evaluări
- TucanoDocument12 paginiTucanoGustavo Avila RodriguezÎncă nu există evaluări
- NOM - S en El Mantenimiento AeronáuticoDocument19 paginiNOM - S en El Mantenimiento AeronáuticoRodriMurveÎncă nu există evaluări
- Mapa y Texto Oleoductos-GasoductosDocument6 paginiMapa y Texto Oleoductos-GasoductosManuel DucidÎncă nu există evaluări
- Trabajo CorreaDocument248 paginiTrabajo CorreaAngel VargasÎncă nu există evaluări
- NDT Ut - Asme B31.3 - 002 - 11-SSKDocument15 paginiNDT Ut - Asme B31.3 - 002 - 11-SSKCESAR AUGUSTO CHANAME TORRES100% (1)
- 1.-Introducción Motores A ReaccionDocument31 pagini1.-Introducción Motores A ReaccionFrank RubioÎncă nu există evaluări
- Introducción A La AerodinamicaDocument46 paginiIntroducción A La AerodinamicaJuan LariosÎncă nu există evaluări
- Presentación Completa Del VLocProDocument108 paginiPresentación Completa Del VLocProYhonatan Testa100% (1)
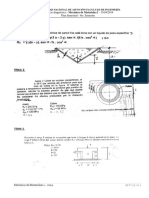
- Ejercicios Resistencia de MaterialesDocument5 paginiEjercicios Resistencia de MaterialesArnaldoÎncă nu există evaluări
- Diagnóstico vehículo OBDDocument28 paginiDiagnóstico vehículo OBDpfespinozaÎncă nu există evaluări
- Licencias y habilitaciones para pilotosDocument10 paginiLicencias y habilitaciones para pilotosHeriberto Barragán MuñozÎncă nu există evaluări
- Ca 43 50 BDocument29 paginiCa 43 50 BGrupo ADI Aeronautica Del InteriorÎncă nu există evaluări
- En Los Actuales Multicopteros ..Document34 paginiEn Los Actuales Multicopteros ..Irga Padilla MartínezÎncă nu există evaluări
- Proyecto Inspeccion de Recipientes Bajo A Presion Javier Diaz 6pDocument103 paginiProyecto Inspeccion de Recipientes Bajo A Presion Javier Diaz 6pKev TeranÎncă nu există evaluări
- Empenaje VerticalDocument43 paginiEmpenaje VerticalVictor Barroso Velazquez100% (2)
- Normas, Reglamentaciones y Servicios de Tránsito Aéreo - Parte IDocument24 paginiNormas, Reglamentaciones y Servicios de Tránsito Aéreo - Parte IAlmaraz Rocha Brian CristianÎncă nu există evaluări
- Repuestos 2016 - 2017 JG 17.03.2017 Amarillos Los MantenciónDocument27 paginiRepuestos 2016 - 2017 JG 17.03.2017 Amarillos Los MantenciónDario BustamanteÎncă nu există evaluări
- 2 - ICAO SLO Helipuertos PDFDocument25 pagini2 - ICAO SLO Helipuertos PDFBethany LeeÎncă nu există evaluări
- Parte 4 Sistema de Aeronavegabilidad PDFDocument43 paginiParte 4 Sistema de Aeronavegabilidad PDFRaul PrietoÎncă nu există evaluări
- Tema 2 CertificacionDocument8 paginiTema 2 CertificacioncarolobustosÎncă nu există evaluări
- RAC 21 - Certificación de Aeronaves y Componentes de AeronavesDocument80 paginiRAC 21 - Certificación de Aeronaves y Componentes de AeronavesLuis RamirezÎncă nu există evaluări
- Calificacion Certificacion de AeronavesDocument71 paginiCalificacion Certificacion de AeronavesFelix Maniega CalvoÎncă nu există evaluări
- WS NDT P PT 01 Proc Tinta PenetranteDocument12 paginiWS NDT P PT 01 Proc Tinta PenetranteDiegoNavarroÎncă nu există evaluări
- Memoria de Una Revolución. Tomo IVDocument432 paginiMemoria de Una Revolución. Tomo IVAsamblea Nacional de la República Bolivariana de Venezuela100% (1)
- Regulación venezolana procedimientos certificación productos aeronáuticos (RAV21Document90 paginiRegulación venezolana procedimientos certificación productos aeronáuticos (RAV21abogoscarÎncă nu există evaluări
- NDT Astm Ut004-11Document20 paginiNDT Astm Ut004-11CESAR AUGUSTO CHANAME TORRESÎncă nu există evaluări
- Examen Teorico Comercial Helicoptero PDFDocument150 paginiExamen Teorico Comercial Helicoptero PDFdebilbo2Încă nu există evaluări
- Clasificación de Vehículos Aeroespaciales y Fuerzas Fundamentales Del VueloDocument18 paginiClasificación de Vehículos Aeroespaciales y Fuerzas Fundamentales Del VueloAlex RodríguezÎncă nu există evaluări
- Valvula de Retencion Extra Chata WaferDocument2 paginiValvula de Retencion Extra Chata WaferJuan Carlos CastroÎncă nu există evaluări
- Helices Laboratorio 4 ReglajeDocument2 paginiHelices Laboratorio 4 ReglajeDageus Skoteinó IppótiÎncă nu există evaluări
- Curso de Calibracion y TorqueDocument90 paginiCurso de Calibracion y TorqueCely Mijares100% (3)
- Hoja de Datos Certificado Tipo-2Document4 paginiHoja de Datos Certificado Tipo-2api-520948779100% (1)
- Regulaciones aeronáuticas y organismos que las controlanDocument7 paginiRegulaciones aeronáuticas y organismos que las controlanyosvaÎncă nu există evaluări
- TFG 2345 CandauDocument81 paginiTFG 2345 CandauCORAL ALONSO JIMÉNEZÎncă nu există evaluări
- Prototipo para BalanceoDocument16 paginiPrototipo para BalanceoRicardo Zevallos CruzÎncă nu există evaluări
- ¿Aviones Militares Con Matricula Civil? - Aviación XDocument3 pagini¿Aviones Militares Con Matricula Civil? - Aviación XEl Don de VolarÎncă nu există evaluări
- NTC5011Document14 paginiNTC5011camilousmepinillaHSEÎncă nu există evaluări
- Instrumentos del motor de aviación cap. 1Document11 paginiInstrumentos del motor de aviación cap. 1wilbert berrasco ninaÎncă nu există evaluări
- 2018 Seminario AeronauticaDocument154 pagini2018 Seminario AeronauticaJuan Hierro100% (1)
- Boroscopía motor JT8D-7B: Tipos y uso de boroscopios para inspección de motoresDocument5 paginiBoroscopía motor JT8D-7B: Tipos y uso de boroscopios para inspección de motoresGuadalupe Gomez100% (1)
- Seguros de AviacionDocument16 paginiSeguros de Aviacioncatalan0104Încă nu există evaluări
- Montaje estabilizador horizontalDocument150 paginiMontaje estabilizador horizontalJavier Alejandro Hernandez HernandezÎncă nu există evaluări
- Historia de CessnaDocument6 paginiHistoria de CessnaSantiago PatitucciÎncă nu există evaluări
- Anexo 14 Vol IIDocument29 paginiAnexo 14 Vol IIAlfredoÎncă nu există evaluări
- 1.3 Ensayos y Pruebas de Los Motores de Combustión Interna RotativaDocument31 pagini1.3 Ensayos y Pruebas de Los Motores de Combustión Interna RotativaLuis AcostaÎncă nu există evaluări
- Definiciones y Abreviaturas de MantenimientoDocument18 paginiDefiniciones y Abreviaturas de MantenimientoJosé Segovia MayorcaÎncă nu există evaluări
- Despachador (Cap. 01) - RegulacionesDocument6 paginiDespachador (Cap. 01) - Regulacionescaoap3847Încă nu există evaluări
- Aeropuertos Más Importantes de América Del NorteDocument2 paginiAeropuertos Más Importantes de América Del NorteNury Cecilia PerezÎncă nu există evaluări
- Aeronavegabilidad ContinuadaDocument27 paginiAeronavegabilidad ContinuadaDavid Alejandro Vega Alfonso100% (1)
- Anexo Normas IRAM - 07sDocument2 paginiAnexo Normas IRAM - 07sCristian Napole100% (1)
- Rca 250223 01Document2 paginiRca 250223 01carlos calidadÎncă nu există evaluări
- Mensaje Técnico: Mantenimiento Y AbastecimientosDocument30 paginiMensaje Técnico: Mantenimiento Y Abastecimientosdeadolvi Ol100% (1)
- Analisis de WeibullDocument5 paginiAnalisis de WeibullRichard VásquezÎncă nu există evaluări
- 3-2 AltimetriaDocument39 pagini3-2 AltimetriaSalomonsito MejiaÎncă nu există evaluări
- Drones: clasificación, tipos y software para fotogrametríaDocument19 paginiDrones: clasificación, tipos y software para fotogrametríaLeidy MagalyÎncă nu există evaluări
- Lista de Verificacion - AeronauticaDocument22 paginiLista de Verificacion - AeronauticaDiego ZegpÎncă nu există evaluări
- StanleyDocument340 paginiStanleyOscar David100% (1)
- Apunte MGA - SM (1c)Document53 paginiApunte MGA - SM (1c)onek89Încă nu există evaluări
- C152 Informe Final V1Document418 paginiC152 Informe Final V1Mauricio Avilez PuentesÎncă nu există evaluări
- Inspección eléctrica post vuelo C-130BDocument161 paginiInspección eléctrica post vuelo C-130BWilfredo TejerinaÎncă nu există evaluări
- Características y tendencias de los aviones que afectan al diseño de aeropuertosDocument42 paginiCaracterísticas y tendencias de los aviones que afectan al diseño de aeropuertosMariano GranateÎncă nu există evaluări
- Ieee Argencon 2016 Paper 20Document6 paginiIeee Argencon 2016 Paper 20ademargcjuniorÎncă nu există evaluări
- Seguridad en Canchas de MadereoDocument17 paginiSeguridad en Canchas de MadereogargeingelÎncă nu există evaluări
- Curso No.15 0Document3 paginiCurso No.15 0edwinÎncă nu există evaluări
- Deber Entramado MaquinaDocument2 paginiDeber Entramado Maquinaanon_761006981Încă nu există evaluări
- Puntos de Control Terrestres para UAVDocument16 paginiPuntos de Control Terrestres para UAVholasa666Încă nu există evaluări
- Rpic-2019 Final PDFDocument7 paginiRpic-2019 Final PDFCamilo RamírezÎncă nu există evaluări
- Viaje A:: Iquitos (PE)Document2 paginiViaje A:: Iquitos (PE)Alonso JayoÎncă nu există evaluări
- Orden de IngenieriaDocument7 paginiOrden de IngenieriaGinna MarcelaÎncă nu există evaluări
- Operador de Vant Arma 3Document4 paginiOperador de Vant Arma 3Yair TabaresÎncă nu există evaluări
- Modificación y Adaptación de Una Aeronave MD500C A Una Aeroambulancia Especializada en Atender NeonatosDocument27 paginiModificación y Adaptación de Una Aeronave MD500C A Una Aeroambulancia Especializada en Atender NeonatosVictor Cedeño.Încă nu există evaluări
- Códigos IataDocument13 paginiCódigos IataHOLA LOLAÎncă nu există evaluări
- Tipos de TranforteDocument24 paginiTipos de TranforteElizabeth Trujillo' TrujilloÎncă nu există evaluări
- 05a Texto Impreso - Cuando en Milán Llovieron Sombreros - CuentosDocument4 pagini05a Texto Impreso - Cuando en Milán Llovieron Sombreros - CuentosNatalia Lorena Reyes Masquiaran100% (1)
- Equipo Mixto 1 Uso Inmoderado de Ciencia y TecnologíaDocument5 paginiEquipo Mixto 1 Uso Inmoderado de Ciencia y TecnologíaEderFloresÎncă nu există evaluări
- El Vuelo Del FenixDocument3 paginiEl Vuelo Del FenixDiegoHernandezÎncă nu există evaluări
- Diseno y Construccion de Una Bancada para Caracterizacion de Plantas Propulsoras Con Motor ElecrticoDocument221 paginiDiseno y Construccion de Una Bancada para Caracterizacion de Plantas Propulsoras Con Motor ElecrticoCamilo MartinezÎncă nu există evaluări
- HelicopterosDocument70 paginiHelicopterosDA Helo100% (6)
- Material compuesto impactoDocument107 paginiMaterial compuesto impactoIvan Ca EsÎncă nu există evaluări
- Casos Prácticos de Clientes InsatisfechosDocument2 paginiCasos Prácticos de Clientes InsatisfechosEdi Baraja100% (1)
- Misiles MTCRDocument320 paginiMisiles MTCRRobinson MaciasÎncă nu există evaluări
- Aérea (Madrid) - 1923-08, N.º 3Document20 paginiAérea (Madrid) - 1923-08, N.º 3Patatero52Încă nu există evaluări
- 5 GseDocument14 pagini5 Gsejuleidy castilloÎncă nu există evaluări
- Relés de mando y circuitos de iluminaciónDocument22 paginiRelés de mando y circuitos de iluminaciónAlekz Ander RmÎncă nu există evaluări