S-ar putea să vă placă și
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- Cantor's Diagonal ArgumentDocument5 paginiCantor's Diagonal ArgumentLe Nguyen Thang LongÎncă nu există evaluări
- Generator Protection SettingsDocument4 paginiGenerator Protection Settingsmoses kakwenaÎncă nu există evaluări
- ZTE ZXSDR R8861 Product Description PDFDocument23 paginiZTE ZXSDR R8861 Product Description PDFНиколайИгоревичНасыбуллин100% (1)
- Master Transition Plan DocumentDocument16 paginiMaster Transition Plan Documentrlfisch100% (1)
- Loading Tax Withholding Information For The US Using HCM Data LoaderDocument67 paginiLoading Tax Withholding Information For The US Using HCM Data LoadersivasubrahmanyamÎncă nu există evaluări
- Uvm Cookbook CollectionDocument54 paginiUvm Cookbook CollectionQuý Trương QuangÎncă nu există evaluări
- Distance Protection - Eercise 1 - MemoDocument7 paginiDistance Protection - Eercise 1 - Memomoses kakwenaÎncă nu există evaluări
- Distance Protection - Eercise 1 - MemoDocument7 paginiDistance Protection - Eercise 1 - Memomoses kakwenaÎncă nu există evaluări
- Distance Protection - Eercise 1 - MemoDocument7 paginiDistance Protection - Eercise 1 - Memomoses kakwenaÎncă nu există evaluări
- Distance Protection - Eercise 1 - MemoDocument7 paginiDistance Protection - Eercise 1 - Memomoses kakwenaÎncă nu există evaluări
- Master StationDocument138 paginiMaster StationWilmer Quishpe AndradeÎncă nu există evaluări
- Srs For Online Movie Ticket BookingDocument9 paginiSrs For Online Movie Ticket BookingKaran Kadakia71% (7)
- Java Full Stack Developer Alekya: Professional SummaryDocument6 paginiJava Full Stack Developer Alekya: Professional SummaryrecruiterkkÎncă nu există evaluări
- Volte Test Solution Training Ma Terials: Huawei Technologies Co. LTDDocument22 paginiVolte Test Solution Training Ma Terials: Huawei Technologies Co. LTDJitendra Asati100% (1)
- Power System Protection Lecture OverviewDocument26 paginiPower System Protection Lecture OverviewRakesh ThapliyalÎncă nu există evaluări
- Etp820S - Electrical Protection 425: S E D E EDocument9 paginiEtp820S - Electrical Protection 425: S E D E Emoses kakwenaÎncă nu există evaluări
- Polytechnic of Namibia Electrical Protection Exam Protection Scheme DesignDocument3 paginiPolytechnic of Namibia Electrical Protection Exam Protection Scheme Designmoses kakwenaÎncă nu există evaluări
- Overcurrent Protection - Time and Current Grading - 2Document5 paginiOvercurrent Protection - Time and Current Grading - 2moses kakwenaÎncă nu există evaluări
- Polytechnic of Namibia Electrical Protection ExamDocument3 paginiPolytechnic of Namibia Electrical Protection Exammoses kakwenaÎncă nu există evaluări
- Polytechnic of Namibia: M Ark Moderated M Ark Exam Ine RsDocument8 paginiPolytechnic of Namibia: M Ark Moderated M Ark Exam Ine Rsmoses kakwenaÎncă nu există evaluări
- Overcurrent Protection for Phase and Earth FaultsDocument14 paginiOvercurrent Protection for Phase and Earth Faultsmoses kakwenaÎncă nu există evaluări
- A Dummies Guide To Ground Fault ProtectionDocument7 paginiA Dummies Guide To Ground Fault ProtectionAndré LuizÎncă nu există evaluări
- Overcurrent Protection - Time and Current GradingDocument5 paginiOvercurrent Protection - Time and Current Gradingmoses kakwenaÎncă nu există evaluări
- Protection of Rotating Machinery: ProblemsDocument3 paginiProtection of Rotating Machinery: Problemsmoses kakwenaÎncă nu există evaluări
- Polytechnic of Namibia Electrical Engineering Tutorial Assignment 1Document2 paginiPolytechnic of Namibia Electrical Engineering Tutorial Assignment 1moses kakwenaÎncă nu există evaluări
- Polytechnic of Namibia Electrical Protection AssignmentDocument5 paginiPolytechnic of Namibia Electrical Protection Assignmentmoses kakwenaÎncă nu există evaluări
- Polytechnic of Namibia Electrical Engineering VT and CT ExercisesDocument2 paginiPolytechnic of Namibia Electrical Engineering VT and CT Exercisesmoses kakwenaÎncă nu există evaluări
- GEN AND GEN-TX PROTECTION - 3 - Stator Earth-Fault ProtectionDocument27 paginiGEN AND GEN-TX PROTECTION - 3 - Stator Earth-Fault Protectionmoses kakwenaÎncă nu există evaluări
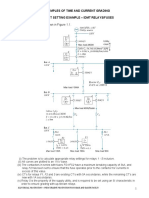
- Exercises On Relay Settings - MemoDocument7 paginiExercises On Relay Settings - Memomoses kakwenaÎncă nu există evaluări
- Gen - and - Gen-TX - Protection - Other Gen. Faults - RevisedDocument15 paginiGen - and - Gen-TX - Protection - Other Gen. Faults - Revisedmoses kakwenaÎncă nu există evaluări
- Protection - of - Rotating - Machinery - Intro and ProblemsDocument5 paginiProtection - of - Rotating - Machinery - Intro and Problemsmoses kakwenaÎncă nu există evaluări
- GEN AND GEN-TX PROTECTION - 2 - Stator Winding ProtectionDocument26 paginiGEN AND GEN-TX PROTECTION - 2 - Stator Winding Protectionmoses kakwenaÎncă nu există evaluări
- ETP820S Electrical Protection 425: Unit Protection of FeedersDocument39 paginiETP820S Electrical Protection 425: Unit Protection of Feedersmoses kakwenaÎncă nu există evaluări
- Protection - of - Rotating - Machinery - Intro and ProblemsDocument5 paginiProtection - of - Rotating - Machinery - Intro and Problemsmoses kakwenaÎncă nu există evaluări
- GEN AND GEN-TX PROTECTION - 1 - IntroductionDocument13 paginiGEN AND GEN-TX PROTECTION - 1 - Introductionmoses kakwenaÎncă nu există evaluări
- EPR410S - LECTURE NOTES - LEC. 36 - Earth-Fault Protection - CBCTDocument17 paginiEPR410S - LECTURE NOTES - LEC. 36 - Earth-Fault Protection - CBCTmoses kakwenaÎncă nu există evaluări
- ETP820S - Lect Notes - pART-3 - Unit Protection - OF - fEEDERSDocument21 paginiETP820S - Lect Notes - pART-3 - Unit Protection - OF - fEEDERSmoses kakwenaÎncă nu există evaluări
- ETP820S - TX and TX Feeder Protection - Part3Document25 paginiETP820S - TX and TX Feeder Protection - Part3moses kakwenaÎncă nu există evaluări
- Introduction To Bus-Bar ProtectionDocument50 paginiIntroduction To Bus-Bar Protectionmoses kakwenaÎncă nu există evaluări
- HuhuhuDocument3 paginiHuhuhuApril Yanda Hadi SatriaÎncă nu există evaluări
- MMW Module 9Document2 paginiMMW Module 9Gin MananganÎncă nu există evaluări
- Michael Nasol (April)Document10 paginiMichael Nasol (April)Anonymous CuIeVjHÎncă nu există evaluări
- TCP and UDP - : Transport Layer ProtocolsDocument4 paginiTCP and UDP - : Transport Layer ProtocolsGabriel DeMarco100% (1)
- Sharah Mutalia Tul Arabia Al Lugha Tul Arabia شرح مطالعۃ العربیۃ الغتہ العربیہDocument353 paginiSharah Mutalia Tul Arabia Al Lugha Tul Arabia شرح مطالعۃ العربیۃ الغتہ العربیہasim zeeshan80% (20)
- U14 InclassDocument24 paginiU14 InclassImron MashuriÎncă nu există evaluări
- An Overview of The Electrical Validation of 10BASE-T 100BASE-TX and 1000BASE-T DevicesDocument14 paginiAn Overview of The Electrical Validation of 10BASE-T 100BASE-TX and 1000BASE-T DevicescolinyÎncă nu există evaluări
- Information Management - Module - Unit IIDocument20 paginiInformation Management - Module - Unit IICARISIOSA NOELLA MAYÎncă nu există evaluări
- DatasheetDocument19 paginiDatasheetSwapnica GarreÎncă nu există evaluări
- Analysis of The Exchange Rate in Peru Between January 2020 and December 2021academic Journal of Interdisciplinary StudiesDocument9 paginiAnalysis of The Exchange Rate in Peru Between January 2020 and December 2021academic Journal of Interdisciplinary StudiesVíctor Hugo En Cuarentena Fernández-BedoyaÎncă nu există evaluări
- Risk Management in The Financial Services Industry PDFDocument20 paginiRisk Management in The Financial Services Industry PDFyadavmihir63Încă nu există evaluări
- FJHJ Volume 85 Issue 1 Pages 320-357Document38 paginiFJHJ Volume 85 Issue 1 Pages 320-357DaliÎncă nu există evaluări
- RPL Engg Drawing NSQF-6Document9 paginiRPL Engg Drawing NSQF-6Safvan KhansahebÎncă nu există evaluări
- Emergency mic and handheld micsDocument2 paginiEmergency mic and handheld micskmleongmyÎncă nu există evaluări
- Assurance Engagement OverviewDocument94 paginiAssurance Engagement OverviewShahid MahmudÎncă nu există evaluări
- Cross Launch Jabber IOS ClientsDocument6 paginiCross Launch Jabber IOS ClientserlifieÎncă nu există evaluări
- SDPB ManualDocument14 paginiSDPB ManualAaron HillmanÎncă nu există evaluări
- Python E1 NotesDocument6 paginiPython E1 NotesaniketÎncă nu există evaluări
- Add or Remove A Digital Signature in Office FilesDocument8 paginiAdd or Remove A Digital Signature in Office Filesmili_ccÎncă nu există evaluări
- DigiKeyboard 6keysDocument7 paginiDigiKeyboard 6keysHarald DasselÎncă nu există evaluări
- ICTs Role in Facilitating Social Activism and Pan-African Networks in AfricaDocument22 paginiICTs Role in Facilitating Social Activism and Pan-African Networks in AfricaDiego MarquesÎncă nu există evaluări