S-ar putea să vă placă și
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Power Quality Improvement Using Facts Device (Statcom)Document6 paginiPower Quality Improvement Using Facts Device (Statcom)joÎncă nu există evaluări
- 179 Load IeeeDocument7 pagini179 Load IeeejoÎncă nu există evaluări
- Power Fluctuation Alleviation Using Cascade Statcoms With Energy Storages For Wind Farm ApplicationsDocument6 paginiPower Fluctuation Alleviation Using Cascade Statcoms With Energy Storages For Wind Farm ApplicationsjoÎncă nu există evaluări
- Microcontroller Based Digital Code Lock: Bachelor of TechnologyDocument50 paginiMicrocontroller Based Digital Code Lock: Bachelor of TechnologyjoÎncă nu există evaluări
- Improvement of Voltage Stability Due To Integration of The Celukan Bawang Power Station To The Bali 16-Bus SystemDocument5 paginiImprovement of Voltage Stability Due To Integration of The Celukan Bawang Power Station To The Bali 16-Bus SystemjoÎncă nu există evaluări
- Transient Stability Improvement Via Combined Method: Journal of Electrical Engineering December 2011Document8 paginiTransient Stability Improvement Via Combined Method: Journal of Electrical Engineering December 2011joÎncă nu există evaluări
- Industrial Training Technical Report: Universisti Teknikal Malaysia MelakaDocument37 paginiIndustrial Training Technical Report: Universisti Teknikal Malaysia MelakajoÎncă nu există evaluări
- Sensors: Real-Time Performance of A Self-Powered Environmental Iot Sensor Network SystemDocument14 paginiSensors: Real-Time Performance of A Self-Powered Environmental Iot Sensor Network SystemjoÎncă nu există evaluări
- Akas Engineering and Trading SDN BHD - Kepala Batas. Penang. MalaysiaDocument5 paginiAkas Engineering and Trading SDN BHD - Kepala Batas. Penang. MalaysiajoÎncă nu există evaluări
- 17 AppendicesDocument18 pagini17 AppendicesjoÎncă nu există evaluări
- Street LightDocument4 paginiStreet LightjoÎncă nu există evaluări
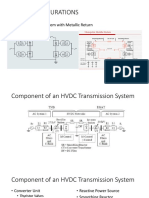
- HVDC Configurations: Monopolar HVDC System With Metallic ReturnDocument4 paginiHVDC Configurations: Monopolar HVDC System With Metallic ReturnjoÎncă nu există evaluări
- Chap 6 SolnsDocument2 paginiChap 6 SolnsjoÎncă nu există evaluări
- 925-General Donation PDFDocument1 pagină925-General Donation PDFjoÎncă nu există evaluări
- HVDC TransDocument67 paginiHVDC Transjo100% (1)
- Chap 9Document64 paginiChap 9joÎncă nu există evaluări
- Utility ApplicationsDocument28 paginiUtility ApplicationsjoÎncă nu există evaluări
- Nptel: High Voltage DC Transmission - Web CourseDocument2 paginiNptel: High Voltage DC Transmission - Web Coursekmd_venkatsubbu0% (1)
- Ch17 PDFDocument18 paginiCh17 PDFjoÎncă nu există evaluări
- Exercise: Xercise BjectiveDocument36 paginiExercise: Xercise BjectivejoÎncă nu există evaluări
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Skinner Reinforcement TodayDocument6 paginiSkinner Reinforcement TodayEnrique Hernández RosasÎncă nu există evaluări
- (ANSI - AWS A5.31-92R) AWS A5 Committee On Filler Metal-SpecificationDocument18 pagini(ANSI - AWS A5.31-92R) AWS A5 Committee On Filler Metal-SpecificationSivaram KottaliÎncă nu există evaluări
- Section A - Listening (15 PTS) I. Listen To The Dialogue and Fill in Each Blank With ONE Suitable Word or Number. The House For RentDocument22 paginiSection A - Listening (15 PTS) I. Listen To The Dialogue and Fill in Each Blank With ONE Suitable Word or Number. The House For RentThanh PhongÎncă nu există evaluări
- Remembering Thanu Padmanabhan - The HinduDocument3 paginiRemembering Thanu Padmanabhan - The HinduIucaa libraryÎncă nu există evaluări
- MAS500 2011 Vår Masteroppgave Henrik Engedal Per Magne EgelidDocument130 paginiMAS500 2011 Vår Masteroppgave Henrik Engedal Per Magne EgelidPoppy DanielsÎncă nu există evaluări
- Gujarat Technological UniversityDocument2 paginiGujarat Technological UniversityShruti BiradarÎncă nu există evaluări
- Getting You To Test Day: An 8-Week Prep Plan For The TOEFL TestDocument2 paginiGetting You To Test Day: An 8-Week Prep Plan For The TOEFL Testsmith90Încă nu există evaluări
- 2020-21 Series Test 1 QPDocument1 pagină2020-21 Series Test 1 QPred18ggmuÎncă nu există evaluări
- Reader of The Year - PDF: Learning Activity 1.1 PortfolioDocument20 paginiReader of The Year - PDF: Learning Activity 1.1 PortfolioAtenaÎncă nu există evaluări
- NCERT Exemplar Class 7 Maths IntegersDocument661 paginiNCERT Exemplar Class 7 Maths IntegersRohiniÎncă nu există evaluări
- Oo All MethodDocument35 paginiOo All Methodmeeraselvam19761970Încă nu există evaluări
- VisualizationDocument4 paginiVisualizationspanglemaker3719349Încă nu există evaluări
- Introduction EthicsDocument26 paginiIntroduction EthicsLawrence MarquezÎncă nu există evaluări
- 3838-Article Text-7786-1-10-20230403Document8 pagini3838-Article Text-7786-1-10-20230403Ramona Elena SpiridonÎncă nu există evaluări
- Proper Storage of Instruments2Document20 paginiProper Storage of Instruments2Pierre Vincent PorrasÎncă nu există evaluări
- Cold-Formed Steel Portal Frame Moment-Resisting Joints Behaviour Capacity and DesignDocument13 paginiCold-Formed Steel Portal Frame Moment-Resisting Joints Behaviour Capacity and DesignAhmed MoniemÎncă nu există evaluări
- Prudence and FrugalityDocument17 paginiPrudence and FrugalitySolaiman III SaripÎncă nu există evaluări
- Social Gaming Merchant AccountDocument2 paginiSocial Gaming Merchant AccountstarprocessingusÎncă nu există evaluări
- Mars Climate Orbiter ReportDocument27 paginiMars Climate Orbiter Reportbiguelo100% (1)
- Refrigeration and Air ConditioningDocument41 paginiRefrigeration and Air Conditioningrejeesh_rajendranÎncă nu există evaluări
- X20PS9600-en V1.20Document10 paginiX20PS9600-en V1.20PREVENCIONISTA HUAQUIANÎncă nu există evaluări
- ITP FORMAT - PSV Modified FormateDocument1 paginăITP FORMAT - PSV Modified Formatemurthy challapalliÎncă nu există evaluări
- Comparisons YouTrackDocument13 paginiComparisons YouTrackMihai DanielÎncă nu există evaluări
- Las-Shs Gen - Chem Melc 1 q2 Week-1Document11 paginiLas-Shs Gen - Chem Melc 1 q2 Week-1Carl Baytola RatesÎncă nu există evaluări
- Vocabulary Placement TestDocument3 paginiVocabulary Placement TestMonica Vergara MejiaÎncă nu există evaluări
- LED Lighting Applications Design GuideDocument20 paginiLED Lighting Applications Design GuideBank100% (3)
- Questionnaire Supply ChainDocument4 paginiQuestionnaire Supply ChainKshatriy'as ThigalaÎncă nu există evaluări
- Jurnal: Ekonomi PembangunanDocument14 paginiJurnal: Ekonomi PembangunanAgus MelasÎncă nu există evaluări
- Mining EsriDocument30 paginiMining EsriCipta Nur Asa100% (1)
- Precast Concrete Structures For BuildingsDocument10 paginiPrecast Concrete Structures For BuildingsspqdragadosirelandÎncă nu există evaluări