S-ar putea să vă placă și
- Operating Systems Interview Questions You'll Most Likely Be Asked: Job Interview Questions SeriesDe la EverandOperating Systems Interview Questions You'll Most Likely Be Asked: Job Interview Questions SeriesÎncă nu există evaluări
- Unit-1 OsDocument9 paginiUnit-1 Osbharathijawahar583Încă nu există evaluări
- Operting System (OS)Document3 paginiOperting System (OS)acorpuz_4Încă nu există evaluări
- Basics of OSDocument22 paginiBasics of OSCherryÎncă nu există evaluări
- Chapter 1: Introduction: Operating System ConceptsDocument21 paginiChapter 1: Introduction: Operating System ConceptsGurvinder SinghÎncă nu există evaluări
- CH 1Document22 paginiCH 1jeela1Încă nu există evaluări
- InroductionDocument25 paginiInroductionAditya RathodÎncă nu există evaluări
- MIT-101-Acitvity 1-Operating System and NetworkingDocument5 paginiMIT-101-Acitvity 1-Operating System and NetworkingCarlo Moon CorpuzÎncă nu există evaluări
- Assignment On Operating SystemsDocument20 paginiAssignment On Operating SystemsShaunik TanejaÎncă nu există evaluări
- Introduction To Operating Systems PDFDocument67 paginiIntroduction To Operating Systems PDFVenkataMurali KrishnaÎncă nu există evaluări
- Operating System Unit 1 & 2 Intro NotesDocument48 paginiOperating System Unit 1 & 2 Intro NotesLaxmi Computer Science and EngineeringÎncă nu există evaluări
- Introduction To OSDocument17 paginiIntroduction To OSindu kaurÎncă nu există evaluări
- Lecture Notes On Operating SystemsDocument7 paginiLecture Notes On Operating Systemsshri_hansiniÎncă nu există evaluări
- Unit 3 Introduction To Operating System ConceptsDocument19 paginiUnit 3 Introduction To Operating System ConceptsRatna KumarÎncă nu există evaluări
- The Federal Polytechnic, Ado - Ekiti: An Assignment On Basic Computer ApplicationDocument34 paginiThe Federal Polytechnic, Ado - Ekiti: An Assignment On Basic Computer ApplicationAdeyinka Samuel AdedejiÎncă nu există evaluări
- Ch1 AnnotatedDocument27 paginiCh1 AnnotatedMeetendra SinghÎncă nu există evaluări
- Unit 1 OSY PresentationDocument30 paginiUnit 1 OSY PresentationBeastboyRahul GamingÎncă nu există evaluări
- Aos M1Document6 paginiAos M1Yan YanÎncă nu există evaluări
- Operating SystemDocument277 paginiOperating SystemkennatolosaÎncă nu există evaluări
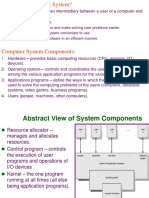
- Hardware - Provides Basic Computing Resources (CPU, Memory, I/ODocument35 paginiHardware - Provides Basic Computing Resources (CPU, Memory, I/OAmjad hassanÎncă nu există evaluări
- Lecture 1 Introduction To OSDocument20 paginiLecture 1 Introduction To OSMarvin BucsitÎncă nu există evaluări
- 1 Chapter 1Document38 pagini1 Chapter 1Markos MathewosÎncă nu există evaluări
- Introduction To Operating SystemDocument18 paginiIntroduction To Operating Systemyuki tetsuÎncă nu există evaluări
- III BCA B OS Unit IDocument12 paginiIII BCA B OS Unit ITesting Fun100% (1)
- Introduction To Operating System (Os)Document43 paginiIntroduction To Operating System (Os)Fazrul Rosli100% (1)
- Operating System - MaterialDocument69 paginiOperating System - MaterialAnil KumarÎncă nu există evaluări
- Platform Technologie S: Lesson 1-Elec4Document27 paginiPlatform Technologie S: Lesson 1-Elec4VertoÎncă nu există evaluări
- Operating System, Functionality and Types: DefinitionDocument5 paginiOperating System, Functionality and Types: DefinitionAmardeep KumarÎncă nu există evaluări
- Os Chapter OneDocument7 paginiOs Chapter Onehiruttesfay67Încă nu există evaluări
- Operating SystemDocument220 paginiOperating Systemfaiyaz pardiwalaÎncă nu există evaluări
- Unit-Iii Topic:: Operating SystemDocument17 paginiUnit-Iii Topic:: Operating SystemDev KaushikÎncă nu există evaluări
- Chapter 1&2Document28 paginiChapter 1&2Nguyễn Trọng QuốcÎncă nu există evaluări
- Introduction To Operating SystemsDocument72 paginiIntroduction To Operating Systemspriya sharmaÎncă nu există evaluări
- CH 1Document10 paginiCH 1Diamond MindglanceÎncă nu există evaluări
- Os EvolutionDocument14 paginiOs EvolutionLeena N ThomasÎncă nu există evaluări
- Complete Civil Service Reviewer 2018Document33 paginiComplete Civil Service Reviewer 2018Edelwiess PuzonÎncă nu există evaluări
- CSC 333 Lecture Note 1Document18 paginiCSC 333 Lecture Note 1akanni toheebÎncă nu există evaluări
- CH 1Document22 paginiCH 1Vasanth RajÎncă nu există evaluări
- Aos Sa1Document14 paginiAos Sa1Yan YanÎncă nu există evaluări
- (Aos) M1Document6 pagini(Aos) M1Faith SangilÎncă nu există evaluări
- 174023Introduction-Lecture-01, 4th Semester by Alok HaldarDocument5 pagini174023Introduction-Lecture-01, 4th Semester by Alok HaldarSoni DarshanÎncă nu există evaluări
- CSS Week3Document47 paginiCSS Week3Jenny MctavishÎncă nu există evaluări
- The Functions of An Operating SystemDocument3 paginiThe Functions of An Operating SystemManav MaistryÎncă nu există evaluări
- Purpose Packages Which Are Written To Meet Specific Needs and General - Purpose PackagesDocument42 paginiPurpose Packages Which Are Written To Meet Specific Needs and General - Purpose PackagesLangat Kipkoech GodwinÎncă nu există evaluări
- Operating SystemDocument8 paginiOperating Systemvikram_5889100% (3)
- Chapter 1: Introduction: (OS Structure, Modes and Services)Document58 paginiChapter 1: Introduction: (OS Structure, Modes and Services)Nikhil TataÎncă nu există evaluări
- Os Unit IDocument29 paginiOs Unit IswapnaÎncă nu există evaluări
- Notes OscdDocument145 paginiNotes OscdSharma SudhirÎncă nu există evaluări
- CH 1Document25 paginiCH 1Akinyotu Damilola victorÎncă nu există evaluări
- Os Chapter - 1Document29 paginiOs Chapter - 1zerihun nanaÎncă nu există evaluări
- Operatingsystems (Autosaved)Document17 paginiOperatingsystems (Autosaved)karravasisthaÎncă nu există evaluări
- Lecture 2 OsDocument5 paginiLecture 2 OsAshna OmedÎncă nu există evaluări
- DCC Micro ProjectDocument10 paginiDCC Micro ProjectSanjay kshirsagarÎncă nu există evaluări
- Intro To UNIXDocument58 paginiIntro To UNIXShivÎncă nu există evaluări
- Lec1 Operating SystemDocument33 paginiLec1 Operating SystemMirna AttallahÎncă nu există evaluări
- 1.0 What Is Operating System?: Four Components of Computer SystemDocument8 pagini1.0 What Is Operating System?: Four Components of Computer SystemPaolo Yao ElloÎncă nu există evaluări
- Os FullDocument59 paginiOs FullSunil KumarÎncă nu există evaluări
- Evolution Operating System-1Document22 paginiEvolution Operating System-1hamid0% (1)
- Assignment On Software, Its Types, System Software, Operating System, Function & Its TypesDocument8 paginiAssignment On Software, Its Types, System Software, Operating System, Function & Its TypesMaQsud AhMad SaNdhuÎncă nu există evaluări
- Operating SystemDocument7 paginiOperating SystemVivian BaluranÎncă nu există evaluări
- Weekly - Progress - Report - Nov 28 - Dec 4 36Document1 paginăWeekly - Progress - Report - Nov 28 - Dec 4 36Yvoj OñisacÎncă nu există evaluări
- S-Curve WP5100-A With Alignment ReferenceDocument2 paginiS-Curve WP5100-A With Alignment ReferenceYvoj OñisacÎncă nu există evaluări
- Weekly - Progress - Report - Nov 28 - Dec 4 20Document1 paginăWeekly - Progress - Report - Nov 28 - Dec 4 20Yvoj OñisacÎncă nu există evaluări
- Weekly - Progress - Report - Nov 28 - Dec 4 8Document1 paginăWeekly - Progress - Report - Nov 28 - Dec 4 8Yvoj OñisacÎncă nu există evaluări
- Benefits-Summary-Philippines NewDocument4 paginiBenefits-Summary-Philippines Newgen genÎncă nu există evaluări
- Sales Forecast vs. Actual ForecastDocument3 paginiSales Forecast vs. Actual ForecastYvoj OñisacÎncă nu există evaluări
- Three Storey Steel Carpark Primavera Schedule SampleDocument2 paginiThree Storey Steel Carpark Primavera Schedule SampleYvoj OñisacÎncă nu există evaluări
- SSSForms Change Request PDFDocument4 paginiSSSForms Change Request PDFEppÎncă nu există evaluări
- OBTL PrecalculusDocument7 paginiOBTL PrecalculusYvoj OñisacÎncă nu există evaluări
- Project Name: LocationDocument9 paginiProject Name: LocationYvoj OñisacÎncă nu există evaluări
- Wp1243 Pipe Chase Block Works ScheduleDocument2 paginiWp1243 Pipe Chase Block Works ScheduleYvoj OñisacÎncă nu există evaluări
- Guideline For Cleaning and Disinfecting Manicuring and Enhancement EquipmentDocument4 paginiGuideline For Cleaning and Disinfecting Manicuring and Enhancement EquipmentYvoj OñisacÎncă nu există evaluări
- OBTL Modern MathDocument7 paginiOBTL Modern MathYvoj OñisacÎncă nu există evaluări
- OBE AlgebraDocument5 paginiOBE AlgebraYvoj OñisacÎncă nu există evaluări
- Bom Admin BLDGDocument100 paginiBom Admin BLDGYvoj OñisacÎncă nu există evaluări
- Digital AudiobooksDocument22 paginiDigital AudiobooksYvoj OñisacÎncă nu există evaluări
- PKI Method StatementDocument2 paginiPKI Method StatementYvoj OñisacÎncă nu există evaluări
- Facade-Office TemfacilDocument1 paginăFacade-Office TemfacilYvoj OñisacÎncă nu există evaluări
- Accomplishments Report: Pki Wastewater Tank Pilipinas Kao IncDocument5 paginiAccomplishments Report: Pki Wastewater Tank Pilipinas Kao IncYvoj OñisacÎncă nu există evaluări
- Research Method Meeting 1BDocument25 paginiResearch Method Meeting 1BYvoj OñisacÎncă nu există evaluări
- C&zpurlin ProfileDocument8 paginiC&zpurlin ProfileRyan BeciosÎncă nu există evaluări
- Research Proposal Document FormatDocument11 paginiResearch Proposal Document FormatYvoj OñisacÎncă nu există evaluări
- Study of Image Recognition Using Cellular PDFDocument5 paginiStudy of Image Recognition Using Cellular PDFYvoj OñisacÎncă nu există evaluări
- Incedendes Oftenly Happened in The Learning Environ Ment of The Family ZoneDocument5 paginiIncedendes Oftenly Happened in The Learning Environ Ment of The Family ZoneYvoj OñisacÎncă nu există evaluări
- Most Common Materials Unit WeightDocument7 paginiMost Common Materials Unit WeightYvoj Oñisac100% (1)
- The Body Mass Index of A ThreeDocument2 paginiThe Body Mass Index of A ThreeYvoj OñisacÎncă nu există evaluări
- Painting EstimateDocument2 paginiPainting EstimateYvoj OñisacÎncă nu există evaluări
- IT 35 Course Syllabus 2017Document8 paginiIT 35 Course Syllabus 2017Yvoj OñisacÎncă nu există evaluări
- Parent Responsilbility Towards Their Inherent For Their Children at Zone 1Document3 paginiParent Responsilbility Towards Their Inherent For Their Children at Zone 1Yvoj OñisacÎncă nu există evaluări
- Real-Time Kernel For The 8051 Family: Reference Manual September 2005Document110 paginiReal-Time Kernel For The 8051 Family: Reference Manual September 2005coolrsÎncă nu există evaluări
- Operating Systems by YUTIKADocument13 paginiOperating Systems by YUTIKANitin Lal ChandaniÎncă nu există evaluări
- Gaetani VxWorks NoaudioDocument24 paginiGaetani VxWorks NoaudiohellorunÎncă nu există evaluări
- DOCU-738 - Integration of Cyclic BSW MainfunctionsDocument36 paginiDOCU-738 - Integration of Cyclic BSW MainfunctionsOusmane DoudousekouÎncă nu există evaluări
- Chapter 6 CpuDocument67 paginiChapter 6 Cpu2ql4db2Încă nu există evaluări
- OS-LecturePPT Unit 1 AY2021-22 TechngVrsnDocument142 paginiOS-LecturePPT Unit 1 AY2021-22 TechngVrsngenuine GamerÎncă nu există evaluări
- Operating System Seminar Topic: Dead Lock Detection: Name: Gopisetty Nagendra REG NO: 11199A081Document16 paginiOperating System Seminar Topic: Dead Lock Detection: Name: Gopisetty Nagendra REG NO: 11199A081Nuthan PrasadÎncă nu există evaluări
- Resource Management and Scheduling in Cloud EnvironmentDocument8 paginiResource Management and Scheduling in Cloud Environmentvickyvarath100% (1)
- Round RobinDocument15 paginiRound RobinSohaib AijazÎncă nu există evaluări
- Ch6 - Process SynchronizationDocument33 paginiCh6 - Process SynchronizationKshitij SharmaÎncă nu există evaluări
- 301OperatingsystemConcepts PDFDocument2 pagini301OperatingsystemConcepts PDFsubhash221103Încă nu există evaluări
- 3.java Multithreading Interview Questions (2023) - JavatpointDocument29 pagini3.java Multithreading Interview Questions (2023) - JavatpointIkramul HaqueÎncă nu există evaluări
- OSEKDocument86 paginiOSEKrsarun999Încă nu există evaluări
- OS and Utility Programs: ICT Long #2Document10 paginiOS and Utility Programs: ICT Long #2Ȼħ ŠultanÎncă nu există evaluări
- OS-CO2-Session 13 Scheduling CriteriaDocument21 paginiOS-CO2-Session 13 Scheduling CriteriaElangovan GuruvaReddyÎncă nu există evaluări
- 2020 2학기 중간고사Document4 pagini2020 2학기 중간고사nhjbest22Încă nu există evaluări
- Joe Sack Performance Troubleshooting With Wait StatsDocument56 paginiJoe Sack Performance Troubleshooting With Wait StatsAamöd ThakürÎncă nu există evaluări
- Schedulingalgorithms and Algorithm EvaluationDocument38 paginiSchedulingalgorithms and Algorithm EvaluationAnshika MishraÎncă nu există evaluări
- Multi Threading in JavaDocument63 paginiMulti Threading in JavaKISHOREMUTCHARLAÎncă nu există evaluări
- CH 5 Process SchedulingDocument100 paginiCH 5 Process SchedulingblablaÎncă nu există evaluări
- Freertos: Alberto BosioDocument52 paginiFreertos: Alberto BosioPropjaÎncă nu există evaluări
- 2process ManagementDocument15 pagini2process ManagementPianic PelmaÎncă nu există evaluări
- Cause CodesDocument53 paginiCause Codeskhurramsh3Încă nu există evaluări
- 01 Introduction Embedded System DesignDocument32 pagini01 Introduction Embedded System DesignPAUL SATHIYANÎncă nu există evaluări
- Porting The C-OS-II Real Time Operating System To The M16C MicrocontrollersDocument142 paginiPorting The C-OS-II Real Time Operating System To The M16C MicrocontrollersskalydÎncă nu există evaluări
- RTOS - RT Linux Porting On S3Cmini2440 ARM9 Board: Ravindra Prasad Bonthu and Subrahmanyam Venkata VeeraghantaDocument4 paginiRTOS - RT Linux Porting On S3Cmini2440 ARM9 Board: Ravindra Prasad Bonthu and Subrahmanyam Venkata VeeraghantaIJERDÎncă nu există evaluări
- Multiple Tasks and Multiple Processes-Preemptive RTOSDocument32 paginiMultiple Tasks and Multiple Processes-Preemptive RTOSmsurendiranÎncă nu există evaluări
- Software Architecture Module 2Document39 paginiSoftware Architecture Module 2Divya MÎncă nu există evaluări
- Test Bank-Chapter Three (Operating Systems) Multiple Choice QuestionsDocument8 paginiTest Bank-Chapter Three (Operating Systems) Multiple Choice QuestionsPhoebe LanoÎncă nu există evaluări