S-ar putea să vă placă și
- Instalación, Configuración y Clonación de Equipos con Sistemas OperativosDe la EverandInstalación, Configuración y Clonación de Equipos con Sistemas OperativosEvaluare: 5 din 5 stele5/5 (1)
- Ejemplo Completo Darma ConsultingDocument139 paginiEjemplo Completo Darma ConsultingImelda Ramirez83% (12)
- Detector de Metales ArcoDocument56 paginiDetector de Metales ArcoWalter ChavezÎncă nu există evaluări
- Satélite Atmosférico: El dron con energía solar para proporcionar acceso a Internet a áreas remotasDe la EverandSatélite Atmosférico: El dron con energía solar para proporcionar acceso a Internet a áreas remotasÎncă nu există evaluări
- Tarjeta SIMDocument8 paginiTarjeta SIMAlexander HernandezÎncă nu există evaluări
- Comandos RouterDocument28 paginiComandos RouterJoséAlexisCruzSolarÎncă nu există evaluări
- Esp8266 Arduino SpanishDocument84 paginiEsp8266 Arduino SpanishjazuÎncă nu există evaluări
- PDF Cuento Julieta Que PlantasteDocument29 paginiPDF Cuento Julieta Que Plantasteandrea100% (1)
- 2PC - Tensión Con Deformmacion Termica - Usando Ansys 18.2 (16.6.20)Document22 pagini2PC - Tensión Con Deformmacion Termica - Usando Ansys 18.2 (16.6.20)Carlos Capuñay NuñezÎncă nu există evaluări
- INA219 (Español) PDFDocument25 paginiINA219 (Español) PDFJOSE FRANCIA ZORRILLAÎncă nu există evaluări
- PLCDocument25 paginiPLCEdwindows Humbble Machaca AsquiÎncă nu există evaluări
- Clase de Https y SSHDocument7 paginiClase de Https y SSHSara Siesquen SandovalÎncă nu există evaluări
- Enfermedad Periodontal Y Salud GeneralDocument167 paginiEnfermedad Periodontal Y Salud GeneralCristianÎncă nu există evaluări
- Practicas CDocument4 paginiPracticas CWaldo Gómez Alvarez100% (1)
- Tema1 1introduccionDocument22 paginiTema1 1introduccionHaibane NathalyÎncă nu există evaluări
- Clitemnestra o El Crimen - REVISTADocument4 paginiClitemnestra o El Crimen - REVISTAVictor CalloÎncă nu există evaluări
- InformeDiseñoE IOT-BlynkDocument13 paginiInformeDiseñoE IOT-BlynkAlexander ValenciaÎncă nu există evaluări
- Jardin Inteligente para Un ArduinoDocument9 paginiJardin Inteligente para Un Arduinojesus villarÎncă nu există evaluări
- Tercerizacion y Cuarterizacion Del MantenimientoDocument6 paginiTercerizacion y Cuarterizacion Del MantenimientoVictor MerchanÎncă nu există evaluări
- Función TrigonométricaDocument7 paginiFunción Trigonométricajakilin2Încă nu există evaluări
- Examen de AdmicionDocument9 paginiExamen de AdmicionMonse CastilloÎncă nu există evaluări
- Libro 16F887Document114 paginiLibro 16F887Angel ToledoÎncă nu există evaluări
- Power Series 9045-EG SpanishDocument35 paginiPower Series 9045-EG Spanishjavierlby100% (1)
- Cerveceria Moctezuma Pedro Domecq EstatregiasDocument19 paginiCerveceria Moctezuma Pedro Domecq EstatregiasRaulMirandaÎncă nu există evaluări
- TCP/IP Illustrated - Richard Stevens (Resumen)Document72 paginiTCP/IP Illustrated - Richard Stevens (Resumen)Agustín GonzalezÎncă nu există evaluări
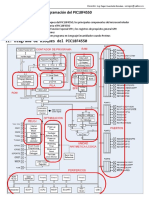
- P01 Modelo de Programación Del PIC18F4550Document14 paginiP01 Modelo de Programación Del PIC18F4550Fide Alvarado100% (1)
- Ajuste Empírico de Controladores Pid Método de Ziegler-NicholsDocument19 paginiAjuste Empírico de Controladores Pid Método de Ziegler-NicholsCarls Guiovani Guirrardelli VegaÎncă nu există evaluări
- Tutorial - Robot 4x4 Con Arduino - BricoGeekDocument19 paginiTutorial - Robot 4x4 Con Arduino - BricoGeekGabriel SemizÎncă nu există evaluări
- Enviar Correo Con React - JsDocument5 paginiEnviar Correo Con React - JsRAMONÎncă nu există evaluări
- El Protocolo WiegandDocument6 paginiEl Protocolo WiegandRuben Hernandez Santos100% (1)
- Arrays y ArduinoDocument10 paginiArrays y ArduinoDomingo ArroyoÎncă nu există evaluări
- Examen Kaplan Corregido GREDocument10 paginiExamen Kaplan Corregido GREMonse CastilloÎncă nu există evaluări
- TECNOLOGÍA RFID Texto CompletoDocument102 paginiTECNOLOGÍA RFID Texto CompletoAngy's PatiñoÎncă nu există evaluări
- Conexión Inalámbrica Entre Dos MicrocontroladoresDocument11 paginiConexión Inalámbrica Entre Dos MicrocontroladoresWalter Mamani CcasaÎncă nu există evaluări
- Iso 12207Document26 paginiIso 12207rossÎncă nu există evaluări
- Codigo de Linea Manchester CMTDocument4 paginiCodigo de Linea Manchester CMTFernando JrnyÎncă nu există evaluări
- Set de Problemas Básicos PropuestosDocument5 paginiSet de Problemas Básicos PropuestosJIRETH ELIAS PARRA BOSSA100% (1)
- Instalar Mac OS X Snow Leopard en VirtualBoxDocument17 paginiInstalar Mac OS X Snow Leopard en VirtualBoxNicolás Fernández CorderoÎncă nu există evaluări
- Diseño de Sistemas Automático de LavamanosDocument6 paginiDiseño de Sistemas Automático de LavamanosAnonimo AnonimoÎncă nu există evaluări
- Walter Andrew Shewhart y Sus Aportes A La CalidadDocument7 paginiWalter Andrew Shewhart y Sus Aportes A La CalidadLuz Moreno0% (1)
- Práctica Adc-Dac Con Pic18f4550Document4 paginiPráctica Adc-Dac Con Pic18f4550Aranguthy CabreraÎncă nu există evaluări
- Tarea Digitales Lunes 22Document6 paginiTarea Digitales Lunes 22lokilloÎncă nu există evaluări
- Modelo Von NeumannDocument10 paginiModelo Von NeumannUsiel RTÎncă nu există evaluări
- DxDiag PC LenovoDocument38 paginiDxDiag PC Lenovogeorge vargas100% (1)
- Codigo AssiiDocument2 paginiCodigo AssiiAngel Arias100% (1)
- Control de Acceso Con Arduino y RFID. - Leantec - ES PDFDocument10 paginiControl de Acceso Con Arduino y RFID. - Leantec - ES PDFJulio CesarÎncă nu există evaluări
- Guia ATAMDocument1 paginăGuia ATAMucinfpracticas100% (1)
- Alba Álvarez Cristobal - Actividad 17 - REDES INFORMÁTICASDocument6 paginiAlba Álvarez Cristobal - Actividad 17 - REDES INFORMÁTICASAlba Álvarez CristobalÎncă nu există evaluări
- NET Core Web Con Csharp-2021Document15 paginiNET Core Web Con Csharp-2021Moises MojicaÎncă nu există evaluări
- 2.1 Protocolos de Comunicacion UARTDocument18 pagini2.1 Protocolos de Comunicacion UARTRafael HernandezÎncă nu există evaluări
- CCNA Security 2.0 Cap 3Document60 paginiCCNA Security 2.0 Cap 3CRISTIAN ROMERO100% (1)
- Ubiquiti Consola ComandosDocument2 paginiUbiquiti Consola ComandosDeivis Contreras CárdenasÎncă nu există evaluări
- CompTIA Network+N10-007Document19 paginiCompTIA Network+N10-007tardio pozoÎncă nu există evaluări
- Ejercicios Altium Mce Esp 05Document5 paginiEjercicios Altium Mce Esp 05Edmundo Arteaga CastroÎncă nu există evaluări
- Ademco Vista 20 Installation ManualDocument130 paginiAdemco Vista 20 Installation Manualtokuro_22100% (1)
- Métodos de Ordenación en Menú PDFDocument4 paginiMétodos de Ordenación en Menú PDFradutariÎncă nu există evaluări
- Lenguajes Independientes Del ContextoDocument11 paginiLenguajes Independientes Del ContextofernandoÎncă nu există evaluări
- Saltos EnsambladorDocument3 paginiSaltos EnsambladorJose CardozoÎncă nu există evaluări
- Cap 7 - Trafico TelefonicoDocument36 paginiCap 7 - Trafico TelefonicoademarÎncă nu există evaluări
- Hacer Backup y Restaurar La Configuración de Un Router o Switch CiscoDocument4 paginiHacer Backup y Restaurar La Configuración de Un Router o Switch CiscoCarlosSanchezÎncă nu există evaluări
- Codigo Intermedio EliverDocument9 paginiCodigo Intermedio EliverwilvercadenaÎncă nu există evaluări
- Manual de Usuario Convertidor MDB Jones Plug 2 PDFDocument11 paginiManual de Usuario Convertidor MDB Jones Plug 2 PDFManuel IsidoroÎncă nu există evaluări
- SOCKETS TCP Y UDP. Implementacion. WebSocketsDocument27 paginiSOCKETS TCP Y UDP. Implementacion. WebSocketscristianÎncă nu există evaluări
- Curso Online Agosto 2020Document4 paginiCurso Online Agosto 2020Marco Herrera0% (1)
- Evoluciona Guía para emprender en seguridad electrónicaDe la EverandEvoluciona Guía para emprender en seguridad electrónicaÎncă nu există evaluări
- CApitulo 4 Montgomery Control EstadisticoDocument12 paginiCApitulo 4 Montgomery Control EstadisticoVictor CalloÎncă nu există evaluări
- Resumen Del Libro Fundamento de Manufactura ModernaDocument18 paginiResumen Del Libro Fundamento de Manufactura ModernaViviana Rozo Castro100% (2)
- Problemas Estadistica Aplicada 2Document10 paginiProblemas Estadistica Aplicada 2Victor CalloÎncă nu există evaluări
- Tratamientos TermicosDocument6 paginiTratamientos TermicosVictor CalloÎncă nu există evaluări
- ProblemaDocument2 paginiProblemaVictor CalloÎncă nu există evaluări
- Agitadores IndustrialesDocument1 paginăAgitadores IndustrialesVictor CalloÎncă nu există evaluări
- Desarrollo Del Pensamiento HumanoDocument5 paginiDesarrollo Del Pensamiento HumanoVictor CalloÎncă nu există evaluări
- Filósofos ClásicosDocument7 paginiFilósofos ClásicosVictor CalloÎncă nu există evaluări
- El Negocio PerfectoDocument2 paginiEl Negocio PerfectoVictor CalloÎncă nu există evaluări
- AREQUIPAZODocument2 paginiAREQUIPAZOVictor CalloÎncă nu există evaluări
- Cuautitlan IzcalliDocument1 paginăCuautitlan IzcalliMarco antonio vazquez riosÎncă nu există evaluări
- PresentaciónDocument9 paginiPresentaciónJeffrey EnriqueÎncă nu există evaluări
- Laboratorio 1-Sustancias IonicasDocument11 paginiLaboratorio 1-Sustancias IonicasDsam IIÎncă nu există evaluări
- 10 Especies Extintas Por El Hombre en El Siglo XXDocument5 pagini10 Especies Extintas Por El Hombre en El Siglo XXmultiservicios norexÎncă nu există evaluări
- Técnicas Bibliográficas, Hemerográficas y Documentales II (2016-2)Document5 paginiTécnicas Bibliográficas, Hemerográficas y Documentales II (2016-2)Juan Manuel Zurita SánchezÎncă nu există evaluări
- Tema 3 Factores de Interés PeriodísticoDocument10 paginiTema 3 Factores de Interés PeriodísticomaralejÎncă nu există evaluări
- Miguel de Cervantes Saavedra - La Tía FingidaDocument13 paginiMiguel de Cervantes Saavedra - La Tía FingidaErick CalderónÎncă nu există evaluări
- Seguimiento Del 27 Al 31 JulioDocument66 paginiSeguimiento Del 27 Al 31 JulioRocio TabordaÎncă nu există evaluări
- Estadistica y Probabilidad Eje 2 PDFDocument14 paginiEstadistica y Probabilidad Eje 2 PDFSandra Gómez TovarÎncă nu există evaluări
- Ensayo Geografia CuantitativaDocument18 paginiEnsayo Geografia CuantitativaMaria T CondeÎncă nu există evaluări
- Asistencia PrenatalDocument3 paginiAsistencia PrenatalAnahí Adorno GÎncă nu există evaluări
- Articulo Delincuencia JuvenilDocument5 paginiArticulo Delincuencia Juvenil'María Torrealba RuízÎncă nu există evaluări
- EnsayoDocument2 paginiEnsayoFelipe Diaz RomanÎncă nu există evaluări
- Ensayo Otoniel GranadosDocument1 paginăEnsayo Otoniel GranadosMarianela MasyRubiÎncă nu există evaluări
- CAPÍTULO 12 Comunicación para La Salud Marketing Social PDFDocument17 paginiCAPÍTULO 12 Comunicación para La Salud Marketing Social PDFGINA VANESA PORTILLA BELTRANÎncă nu există evaluări
- Ritmo en La MúsicaDocument6 paginiRitmo en La MúsicaMatías Keller SarmientoÎncă nu există evaluări
- InvestigacionDocument37 paginiInvestigacionEmmanuel CruzÎncă nu există evaluări
- 1 comprobanteNSS PDFDocument1 pagină1 comprobanteNSS PDFJorge Arturo Linares DelgadoÎncă nu există evaluări
- Resolucion Caja MenorDocument3 paginiResolucion Caja MenorJesus Anderson GomezForeroÎncă nu există evaluări
- Proyecto de Vida.Document3 paginiProyecto de Vida.Daniel Esteban Cardenas VeraÎncă nu există evaluări
- Análisis de La Problemática de La Educación Nacional SílaboDocument4 paginiAnálisis de La Problemática de La Educación Nacional SílaboLeinoto Macedo CórdovaÎncă nu există evaluări
- Mecanismosdelahipertensionarterial 140806001121 Phpapp01Document22 paginiMecanismosdelahipertensionarterial 140806001121 Phpapp01Marlen FedericoÎncă nu există evaluări
- CURSO PCP MODULO 3 Programacion JIT KANBAN Capdo - 2018-10-19 PDFDocument129 paginiCURSO PCP MODULO 3 Programacion JIT KANBAN Capdo - 2018-10-19 PDFJOHNSEDÎncă nu există evaluări
- Ensayo Juan VasquezDocument4 paginiEnsayo Juan VasquezJuan Sebastian Vasquez OrtizÎncă nu există evaluări
- Respuestas Unidad 1Document14 paginiRespuestas Unidad 1Alexis Zamora FloresÎncă nu există evaluări
- Trabajo de KaqchikelDocument9 paginiTrabajo de KaqchikelJesua Perez100% (1)