S-ar putea să vă placă și
- Lucru Mecanic Si EnergiaDocument6 paginiLucru Mecanic Si EnergiaAnka MariaÎncă nu există evaluări
- Lucrul Mecanic - 1Document60 paginiLucrul Mecanic - 1bambucha90Încă nu există evaluări
- Transformari de StareDocument15 paginiTransformari de StareAndreea ManuÎncă nu există evaluări
- Legile de Conservare A Energiei Si Momentului CineticDocument12 paginiLegile de Conservare A Energiei Si Momentului CineticAndreea Banateanu0% (2)
- Electrizarea CorpurilorDocument4 paginiElectrizarea CorpurilorCristian BrotacÎncă nu există evaluări
- Produsul Vectorial A Doi VectoriDocument1 paginăProdusul Vectorial A Doi VectoriAnamaria DudauÎncă nu există evaluări
- Interactiunea Forta GreutateaDocument7 paginiInteractiunea Forta GreutateaLinamora GeorgyaÎncă nu există evaluări
- Oscilatii Mecanice - Proiect Clasa A XI-A A FinalDocument18 paginiOscilatii Mecanice - Proiect Clasa A XI-A A FinalDespina VasileÎncă nu există evaluări
- Puterea MecanicaDocument7 paginiPuterea MecanicaManolache Ionut Octavian100% (1)
- Mișcarea Unui Corp Pe Un Plan Înclinat CL - 7Document12 paginiMișcarea Unui Corp Pe Un Plan Înclinat CL - 7Mihaela SaviucÎncă nu există evaluări
- 2-Studiul Mişcării Pe Planul ÎnclinatDocument3 pagini2-Studiul Mişcării Pe Planul Înclinatfhdh fhrhr100% (1)
- Probleme Camp ElectricDocument63 paginiProbleme Camp Electricmihai294Încă nu există evaluări
- Legile Mecanicii Clasice Ale Lui NewtonDocument2 paginiLegile Mecanicii Clasice Ale Lui NewtonDaniel Comaniciu100% (2)
- Forta ElasticaDocument2 paginiForta ElasticaMariaIonela Dinu50% (2)
- Viteza LuminiiDocument11 paginiViteza LuminiiMarian TeodorescuÎncă nu există evaluări
- File 02 Teorie Optica PP 5-10Document7 paginiFile 02 Teorie Optica PP 5-10Nicole Nicoleta RiavapÎncă nu există evaluări
- Oglinzi PlaneDocument2 paginiOglinzi PlaneManu IacobÎncă nu există evaluări
- Fisa de Lucru 3Document3 paginiFisa de Lucru 3Alexandru MicuÎncă nu există evaluări
- Forța Elastică. Cuplarea ResorturilorDocument1 paginăForța Elastică. Cuplarea ResorturilorCorina TonitaÎncă nu există evaluări
- Campul Magnetic in Centrul Unei Spire Circulare Si Al Unui Curent Rectiliniu Infinit de LungDocument1 paginăCampul Magnetic in Centrul Unei Spire Circulare Si Al Unui Curent Rectiliniu Infinit de LungMaria Ioana ChirilaÎncă nu există evaluări
- Interferenta LuminiiDocument8 paginiInterferenta LuminiiMaya100% (1)
- Forta de Frecare+TensiuneDocument2 paginiForta de Frecare+Tensiunemagdalenav80% (10)
- Determinara Constantei Elastice A Unui ResortDocument2 paginiDeterminara Constantei Elastice A Unui ResortAndrei IorgaÎncă nu există evaluări
- Mirajul, Curcubeul Si Fata MorganaDocument17 paginiMirajul, Curcubeul Si Fata MorganaCosmina AndreeaÎncă nu există evaluări
- Test Calculul Vectorial 2017Document4 paginiTest Calculul Vectorial 2017Borsos ZoltanÎncă nu există evaluări
- Intensitatea Campului Gravitational Si ElectricDocument1 paginăIntensitatea Campului Gravitational Si ElectricDiana Maria RobanÎncă nu există evaluări
- Test 7 LM P EcepDocument2 paginiTest 7 LM P EcepSorin Voicu100% (1)
- Echilibrul Solidului Rigid SuspendatDocument1 paginăEchilibrul Solidului Rigid SuspendatAna Maria LazarÎncă nu există evaluări
- OSCILAŢII MECANICE Clasa XIprofDocument17 paginiOSCILAŢII MECANICE Clasa XIprofPetcu FlorentinaÎncă nu există evaluări
- Miscarea Oscilatorie ArmonicaDocument5 paginiMiscarea Oscilatorie ArmonicaSzelesÎncă nu există evaluări
- Miscarea Rectilinie Uniform Variată - Graficul Mșcării Viteză - Timp CL - 6 PDFDocument7 paginiMiscarea Rectilinie Uniform Variată - Graficul Mșcării Viteză - Timp CL - 6 PDFMihaela Saviuc100% (1)
- Elemente de Cinematica Si Dinamica RelativistaDocument17 paginiElemente de Cinematica Si Dinamica RelativistaAlex100% (1)
- Fenomene Optice-Aplicatie ElevDocument20 paginiFenomene Optice-Aplicatie ElevСергей Янчев100% (2)
- Reflexia Şi Refracţia LuminiiDocument14 paginiReflexia Şi Refracţia LuminiiDanielPetreÎncă nu există evaluări
- CiocnireaDocument5 paginiCiocnireaLaura Maria GalanÎncă nu există evaluări
- Legea Lui Arhimede TeorieDocument3 paginiLegea Lui Arhimede TeoriePetrut ValentinÎncă nu există evaluări
- Formule de Geometrie AnaliticaDocument1 paginăFormule de Geometrie Analiticamiroiu_mÎncă nu există evaluări
- III.3.1 - Interacțiunea. Efectele InteracțiuniiDocument2 paginiIII.3.1 - Interacțiunea. Efectele InteracțiuniiAdelaÎncă nu există evaluări
- Astronomie - Transformari de CoordonateDocument7 paginiAstronomie - Transformari de CoordonateAnaMariaÎncă nu există evaluări
- Studiul Oscilatiilor Fortate L1Document10 paginiStudiul Oscilatiilor Fortate L1Suingiu LucianÎncă nu există evaluări
- Fisa de Lucru IX Legea Lui Hooke Forta eDocument2 paginiFisa de Lucru IX Legea Lui Hooke Forta eBOGDAN ANI-CODREANUÎncă nu există evaluări
- Fisa Lucru Lucru Mecanic Si Energia Mecanica Clasa IX - Prof. Venczel DianaDocument2 paginiFisa Lucru Lucru Mecanic Si Energia Mecanica Clasa IX - Prof. Venczel DianaDiana Venczel100% (1)
- Vector IDocument11 paginiVector IAlexandra TotoianuÎncă nu există evaluări
- Lucrul Mecanic Clasa A IxaDocument17 paginiLucrul Mecanic Clasa A IxaMariana TeacaÎncă nu există evaluări
- Test de Eval - Fizicacl.ix - Nr.1si Nr.2miscare MecanicaDocument2 paginiTest de Eval - Fizicacl.ix - Nr.1si Nr.2miscare MecanicaMihaela Gula0% (1)
- 11 Seral FizicaDocument2 pagini11 Seral FizicaDana Andronic-Ghionea0% (1)
- Vectori: - ReferatDocument7 paginiVectori: - ReferatSima MariaÎncă nu există evaluări
- Temă OglinziDocument2 paginiTemă OglinzimambiÎncă nu există evaluări
- Fizica - Lucru Mecanic - Energie PDFDocument32 paginiFizica - Lucru Mecanic - Energie PDFMirel67Încă nu există evaluări
- Lectii-Virtuale - Ro - Congruența Triunghiurilor OarecareDocument1 paginăLectii-Virtuale - Ro - Congruența Triunghiurilor OarecareMonica CreangaÎncă nu există evaluări
- Cap.3 Circuite de Curent Alternativ: Reprezentarea În Complex A Funcţiilor Sinusoidale de TimpDocument16 paginiCap.3 Circuite de Curent Alternativ: Reprezentarea În Complex A Funcţiilor Sinusoidale de TimpAdi NeaţăÎncă nu există evaluări
- Lectie La FizicaDocument19 paginiLectie La FizicaVictorEsipencoÎncă nu există evaluări
- Dinamica FizicaDocument15 paginiDinamica FizicaMolnar LeventeÎncă nu există evaluări
- 2.principiile Termodinamicii Real - TeorieDocument7 pagini2.principiile Termodinamicii Real - Teorieluca mscÎncă nu există evaluări
- Lucrare de Laboartor Circuit ElectricDocument3 paginiLucrare de Laboartor Circuit ElectricTantica Caliment100% (1)
- Lucrul-Mecanic Energia PDFDocument10 paginiLucrul-Mecanic Energia PDFciucalata88100% (1)
- LUCRUL MECANIC 1.odtDocument16 paginiLUCRUL MECANIC 1.odtCiudin BogdanaÎncă nu există evaluări
- 4 Mecanica DinamicaDocument21 pagini4 Mecanica DinamicaAugusta LeuceaÎncă nu există evaluări
- Test 05 de Antr. - LB Română-Tehno PDFDocument4 paginiTest 05 de Antr. - LB Română-Tehno PDFdumitruionutandreiÎncă nu există evaluări
- Test 04 de Antr. - LB Română-TehnoDocument4 paginiTest 04 de Antr. - LB Română-TehnodumitruionutandreiÎncă nu există evaluări
- Test 03 de Antr. - LB Română-TehnoDocument4 paginiTest 03 de Antr. - LB Română-TehnodumitruionutandreiÎncă nu există evaluări
- Legi de ConservareDocument12 paginiLegi de ConservareAnonymous 67EwtOkÎncă nu există evaluări
- Test 02 de Antr. - LB Română-TehnoDocument4 paginiTest 02 de Antr. - LB Română-Tehnodumitruionutandrei100% (1)
- Test 01 de Antr. - LB Română-TehnoDocument4 paginiTest 01 de Antr. - LB Română-TehnodumitruionutandreiÎncă nu există evaluări
- Portretul Omului Contemporan. Barbarul (George Colang, Adela Gavrilescu, 2011)Document3 paginiPortretul Omului Contemporan. Barbarul (George Colang, Adela Gavrilescu, 2011)dumitruionutandrei0% (1)
- Test 01 de Antr. - LB Română-TehnoDocument4 paginiTest 01 de Antr. - LB Română-TehnodumitruionutandreiÎncă nu există evaluări
- Si Biblia Are Totusi Dreptate - Werner KellerDocument221 paginiSi Biblia Are Totusi Dreptate - Werner KellerDaniel GrigoreÎncă nu există evaluări
- Combinatorica PDFDocument10 paginiCombinatorica PDFdumitruionutandrei100% (3)
- ANTREPRENORIAT c1Document18 paginiANTREPRENORIAT c1Isabella BarbarosÎncă nu există evaluări
- Static ADocument7 paginiStatic AdumitruionutandreiÎncă nu există evaluări
- Modul 1 Didactici Si Evaluare - 0Document88 paginiModul 1 Didactici Si Evaluare - 0vfanghelinaÎncă nu există evaluări
- Sinteze de Bac FizicaDocument7 paginiSinteze de Bac FizicaPaul Tanu60% (5)
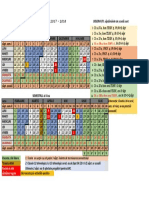
- Calendar Școlar 2017-2018Document1 paginăCalendar Școlar 2017-2018dumitruionutandreiÎncă nu există evaluări
- Formulele Matematicii Din GimnaziuDocument2 paginiFormulele Matematicii Din GimnaziudumitruionutandreiÎncă nu există evaluări
- Geometrie AnaliticaDocument7 paginiGeometrie AnaliticaionflatronÎncă nu există evaluări
- Suport Curs Biologie Clasa A 11-ADocument141 paginiSuport Curs Biologie Clasa A 11-Asonny me100% (1)
- Mircea Cel Batran Si Luptele Cu Turcii PDFDocument73 paginiMircea Cel Batran Si Luptele Cu Turcii PDFAnonymous OcN0BHXFt100% (6)
- Geometrie Si Trigonometrie PDFDocument7 paginiGeometrie Si Trigonometrie PDFdumitruionutandreiÎncă nu există evaluări
- Formulele Matematicii Din GimnaziuDocument2 paginiFormulele Matematicii Din GimnaziudumitruionutandreiÎncă nu există evaluări
- Test - Operatii Cu Numere IntregiDocument2 paginiTest - Operatii Cu Numere IntregiStefania Aura100% (7)
- Manual Practic de Tratamente Naturiste (DR - Daniel Boarim)Document288 paginiManual Practic de Tratamente Naturiste (DR - Daniel Boarim)dumitruionutandrei100% (6)
- Geometrie Si Trigonometrie PDFDocument7 paginiGeometrie Si Trigonometrie PDFdumitruionutandreiÎncă nu există evaluări
- Calendar Școlar 2017-2018Document1 paginăCalendar Școlar 2017-2018dumitruionutandreiÎncă nu există evaluări
- Probleme de Aritmetică IDocument71 paginiProbleme de Aritmetică IdumitruionutandreiÎncă nu există evaluări