S-ar putea să vă placă și
- DC Motor Speed Control Using PID Controller in Lab View: January 2015Document5 paginiDC Motor Speed Control Using PID Controller in Lab View: January 2015lovely personÎncă nu există evaluări
- DC Motor Speed Control Using PID Controller in Lab View: February 2015Document5 paginiDC Motor Speed Control Using PID Controller in Lab View: February 2015Muhdnursalam ZolkepliÎncă nu există evaluări
- PID Controller Based DC Motor Speed ControlDocument4 paginiPID Controller Based DC Motor Speed ControlEditor IJRITCCÎncă nu există evaluări
- 6 21 5 PBDocument5 pagini6 21 5 PBWidad BananeÎncă nu există evaluări
- Applying Control Theory to a Real DC Motor in LabVIEWDocument5 paginiApplying Control Theory to a Real DC Motor in LabVIEWnorickespinosÎncă nu există evaluări
- Modelling and Control of DC Motor Speed and Position For Wheel Mobile Robot ApplicationDocument5 paginiModelling and Control of DC Motor Speed and Position For Wheel Mobile Robot Applicationmusavvirabdul123Încă nu există evaluări
- Result PPRDocument5 paginiResult PPRMayuri Chauray-shindeÎncă nu există evaluări
- Comparative Study and Implementation of Speed Control of BLDC Motor Using Traditional Pi and Fuzzy Pi Controller IJERTV9IS040527Document6 paginiComparative Study and Implementation of Speed Control of BLDC Motor Using Traditional Pi and Fuzzy Pi Controller IJERTV9IS040527DIVYA PRASOONA CÎncă nu există evaluări
- GAIN SCHEDULING CONTROLLER DESIGN FOR AN ELECTRIC DRIVE Final PDFDocument6 paginiGAIN SCHEDULING CONTROLLER DESIGN FOR AN ELECTRIC DRIVE Final PDFGlan DevadhasÎncă nu există evaluări
- 4426 15682 1 PBDocument9 pagini4426 15682 1 PBmuhammad akbarÎncă nu există evaluări
- Speed Performance of Three Phase Induction Motor by Using Simplified Vector Control MethodDocument7 paginiSpeed Performance of Three Phase Induction Motor by Using Simplified Vector Control MethodNithyashriÎncă nu există evaluări
- Real Time DC Motor Position Control Using PID Controller in LabVIEWDocument8 paginiReal Time DC Motor Position Control Using PID Controller in LabVIEWCrazyGamer SLÎncă nu există evaluări
- Lab Report Control IDocument19 paginiLab Report Control Iridzwan abuÎncă nu există evaluări
- Control Report 045Document4 paginiControl Report 045HybaibÎncă nu există evaluări
- Design and Simulation of DC Motor Speed Controller Using Pole Placement Technique and MATLABDocument9 paginiDesign and Simulation of DC Motor Speed Controller Using Pole Placement Technique and MATLAB2K18/EE/244 VIPESH DUNKWALÎncă nu există evaluări
- DC Motor Speed Control Through Arduino and L298N Motor Driver Using PID ControllerDocument4 paginiDC Motor Speed Control Through Arduino and L298N Motor Driver Using PID ControllerKuganes ChandranÎncă nu există evaluări
- Speed Control of AC Motor: International Journal of Innovative Technology and Exploring Engineering February 2021Document4 paginiSpeed Control of AC Motor: International Journal of Innovative Technology and Exploring Engineering February 2021SABARISH MechanicalÎncă nu există evaluări
- A Project ProposalDocument5 paginiA Project ProposalMuhammad Umer FarooqÎncă nu există evaluări
- Speed Control of Three Phase Induction Motor Using Fuzzy Pid Controller IJERTV2IS110961Document6 paginiSpeed Control of Three Phase Induction Motor Using Fuzzy Pid Controller IJERTV2IS110961NithyashriÎncă nu există evaluări
- Speed Control of DC Motor by Various MethodsDocument5 paginiSpeed Control of DC Motor by Various MethodsVIVA-TECH IJRIÎncă nu există evaluări
- A Controller Design For Servo Control System Using Different TechniquesDocument8 paginiA Controller Design For Servo Control System Using Different TechniquesKOKOÎncă nu există evaluări
- Speed Control of DC Motor Using Pid Controller ThesisDocument7 paginiSpeed Control of DC Motor Using Pid Controller ThesisWriteMyPaperForMeTucson100% (2)
- Camera Movement Control Using PID Controller in LabVIEWDocument5 paginiCamera Movement Control Using PID Controller in LabVIEWEditor IJTSRDÎncă nu există evaluări
- Speed Control of DC Motor Using Pid Controller BasedDocument16 paginiSpeed Control of DC Motor Using Pid Controller Basedayesha amjadÎncă nu există evaluări
- Lab View Based Speed Control of DC Motor Using PID Controller-1582Document6 paginiLab View Based Speed Control of DC Motor Using PID Controller-1582user01254Încă nu există evaluări
- DC Motor Position Control Using Fuzzy Proportional-Derivative Controllers With Different Defuzzification MethodsDocument11 paginiDC Motor Position Control Using Fuzzy Proportional-Derivative Controllers With Different Defuzzification MethodsLele glosyÎncă nu există evaluări
- Diagram PDF ProjectDocument4 paginiDiagram PDF ProjectsatvikÎncă nu există evaluări
- Speed Control of DC Motor Using PID Algorithm (STM32F4) : InstructablesDocument10 paginiSpeed Control of DC Motor Using PID Algorithm (STM32F4) : InstructablespedroÎncă nu există evaluări
- LPC2148 Finger Print ProjectDocument55 paginiLPC2148 Finger Print Projectbvkarthik2711Încă nu există evaluări
- Microcontroller Based Closed-Loop Automatic Speed Control of DC Motor Using PWMDocument4 paginiMicrocontroller Based Closed-Loop Automatic Speed Control of DC Motor Using PWMSphasonke Daniel ZhouÎncă nu există evaluări
- DC Motor Pid ControlDocument6 paginiDC Motor Pid ControlSampath KumarÎncă nu există evaluări
- Comparative Analysis of Speed Control Techniques of DC Motors With MatlabDocument4 paginiComparative Analysis of Speed Control Techniques of DC Motors With Matlabsrinureddy2014Încă nu există evaluări
- Ben Faith PublicationDocument12 paginiBen Faith PublicationSAMPSON BENDORÎncă nu există evaluări
- Monitoring and Control of A Variable Frequency Drive Using PLC and ScadaDocument8 paginiMonitoring and Control of A Variable Frequency Drive Using PLC and ScadaPiero AlarconÎncă nu există evaluări
- PID Control of Mini Conveyor DC Motor SpeedDocument6 paginiPID Control of Mini Conveyor DC Motor SpeedGifhar RahmanÎncă nu există evaluări
- 05 Articol 31 36Document6 pagini05 Articol 31 36enghasan1969Încă nu există evaluări
- Jurnal DC (Genetic Algorithm)Document5 paginiJurnal DC (Genetic Algorithm)Puja Awwalia R.Încă nu există evaluări
- Design and Implementation of PID Controller in ProDocument6 paginiDesign and Implementation of PID Controller in ProBAGAS ADIYATMA Mahasiswa PNJÎncă nu există evaluări
- Fuzzy PID Controller Improves Speed Control of DC Motor in LabVIEWDocument7 paginiFuzzy PID Controller Improves Speed Control of DC Motor in LabVIEWGunpla GandamuÎncă nu există evaluări
- DC Motor Speed C BcontrolDocument6 paginiDC Motor Speed C BcontrolRoger RozarioÎncă nu există evaluări
- Speed Control of Induction Motor Using Fuzzy LogicDocument4 paginiSpeed Control of Induction Motor Using Fuzzy LogicEditor IJRITCCÎncă nu există evaluări
- Autotuning Fuzzy PID Controller For Speed Control of BLDC MotorDocument8 paginiAutotuning Fuzzy PID Controller For Speed Control of BLDC MotorZikra ElninoÎncă nu există evaluări
- BLDC Motor Speed Control using PI and Fuzzy PIDocument8 paginiBLDC Motor Speed Control using PI and Fuzzy PIDrishyaÎncă nu există evaluări
- A Fuzzy Logic Control Project For A Real-Time Microprocessor LaboratoryDocument6 paginiA Fuzzy Logic Control Project For A Real-Time Microprocessor LaboratoryZelalem TarekegnÎncă nu există evaluări
- PID Speed Control of DC Motor Using ArduinoDocument63 paginiPID Speed Control of DC Motor Using Arduinogxge50% (2)
- Precision Motion Control With Variable Speed AC Drives Using PLCDocument5 paginiPrecision Motion Control With Variable Speed AC Drives Using PLCMarulasiddappa H BÎncă nu există evaluări
- Speed Control of DC Motor Using Particle Swarm Optimization Technique IJERTV2IS60650Document7 paginiSpeed Control of DC Motor Using Particle Swarm Optimization Technique IJERTV2IS60650Yeduresapu SantoshÎncă nu există evaluări
- DC Motor Closed LoopDocument11 paginiDC Motor Closed Looprichard chombaÎncă nu există evaluări
- Automation of Tank Level by Using PLC and SCADA / HMI: ISSN: 2454-132X Impact Factor: 4.295Document9 paginiAutomation of Tank Level by Using PLC and SCADA / HMI: ISSN: 2454-132X Impact Factor: 4.295Nils BickelÎncă nu există evaluări
- Ushless DC Motor Speed Control Using Both PIDocument7 paginiUshless DC Motor Speed Control Using Both PINxj CfcÎncă nu există evaluări
- Four Quadrant Speed Control of DC Motor With The Help of AT89S52 MicrocontrollerDocument12 paginiFour Quadrant Speed Control of DC Motor With The Help of AT89S52 MicrocontrollerpriyaÎncă nu există evaluări
- DC Motor Speed Control SI PID Tuning PDFDocument4 paginiDC Motor Speed Control SI PID Tuning PDFvince kafuaÎncă nu există evaluări
- Control Tutorials For MATLAB and Simulink - PI Control of DC Motor SpeedDocument24 paginiControl Tutorials For MATLAB and Simulink - PI Control of DC Motor SpeedMohd A. IsaÎncă nu există evaluări
- Optimal PID Controller Parameters For Vector ContrDocument8 paginiOptimal PID Controller Parameters For Vector ContrTony starkÎncă nu există evaluări
- Irjet V2i8242 PDFDocument6 paginiIrjet V2i8242 PDFAhmed Osama MikawiÎncă nu există evaluări
- Analysis of Speed Control of DC Motor - A Review StudyDocument6 paginiAnalysis of Speed Control of DC Motor - A Review StudyRachelÎncă nu există evaluări
- Automatic Hydro Power Plant Monitoring and Controlling Using PLC & SCADADocument6 paginiAutomatic Hydro Power Plant Monitoring and Controlling Using PLC & SCADAIJSTEÎncă nu există evaluări
- PV Operated Fuzzy Based DC Motor Controlled Centrifugal Pump Used For IrrigationDocument4 paginiPV Operated Fuzzy Based DC Motor Controlled Centrifugal Pump Used For IrrigationSenthil KumarÎncă nu există evaluări
- Automotive Electronic Diagnostics (Course 2)De la EverandAutomotive Electronic Diagnostics (Course 2)Evaluare: 4 din 5 stele4/5 (2)
- Lecture 2-Classical Optimization TechniquesDocument18 paginiLecture 2-Classical Optimization TechniquesEngidÎncă nu există evaluări
- Optimal Allocation of Distributed Generation For Performance Enhancement of Distribution System Using Particle Swarm OptimizationDocument18 paginiOptimal Allocation of Distributed Generation For Performance Enhancement of Distribution System Using Particle Swarm OptimizationEngidÎncă nu există evaluări
- PUE 4110: Optimization Techniques: Lecturer: Prof. Philip NgareDocument15 paginiPUE 4110: Optimization Techniques: Lecturer: Prof. Philip NgareEngidÎncă nu există evaluări
- Engidaw Abel EE400 0003 2020 Presentation IDocument14 paginiEngidaw Abel EE400 0003 2020 Presentation IEngidÎncă nu există evaluări
- Engidaw Abel EE400 0003 2020 Presentation IIDocument38 paginiEngidaw Abel EE400 0003 2020 Presentation IIEngidÎncă nu există evaluări
- Exact Transmission Power Losses Calculation and Allocation MethodDocument7 paginiExact Transmission Power Losses Calculation and Allocation MethodEngidÎncă nu există evaluări
- Optimal Power Flow: A Bibliographic Survey I: Formulations and Deterministic MethodsDocument38 paginiOptimal Power Flow: A Bibliographic Survey I: Formulations and Deterministic MethodsEngidÎncă nu există evaluări
- Applied Sciences: The Power System and Microgrid Protection-A ReviewDocument30 paginiApplied Sciences: The Power System and Microgrid Protection-A ReviewEngidÎncă nu există evaluări
- 2.ISCA RJEngS 2013 115 PDFDocument6 pagini2.ISCA RJEngS 2013 115 PDFHØu ÇîNeÎncă nu există evaluări
- Hung 2016Document20 paginiHung 2016EngidÎncă nu există evaluări
- Engidaw Abel EE400 0003 2020 Presentation IDocument14 paginiEngidaw Abel EE400 0003 2020 Presentation IEngidÎncă nu există evaluări
- 9-PSCA Modified by On 11.9.2013Document56 pagini9-PSCA Modified by On 11.9.2013EngidÎncă nu există evaluări
- 2018 Book Off-GridElectricalSystemsInDevDocument492 pagini2018 Book Off-GridElectricalSystemsInDevtabishakhÎncă nu există evaluări
- Distributed Generation and Its Impact On Power GriDocument11 paginiDistributed Generation and Its Impact On Power GriEngidÎncă nu există evaluări
- 2017 Book EnergyHarvestingAndEnergyEfficDocument673 pagini2017 Book EnergyHarvestingAndEnergyEffictabishakhÎncă nu există evaluări
- Design and Simulation of Standalone Hybrid Solar Biomass Electricity Generation System For A Rural Village in EthiopiaDocument4 paginiDesign and Simulation of Standalone Hybrid Solar Biomass Electricity Generation System For A Rural Village in EthiopiaEngidÎncă nu există evaluări
- Eetaa PDFDocument333 paginiEetaa PDFKyren GreiggÎncă nu există evaluări
- Writting Final Year Project Proposal and Report PDFDocument14 paginiWritting Final Year Project Proposal and Report PDFEngidÎncă nu există evaluări
- 1.ashna GSM Based Energy Meter ReadingDocument9 pagini1.ashna GSM Based Energy Meter ReadingEngidÎncă nu există evaluări
- 2010, 2nd Sem Class ScheduleDocument15 pagini2010, 2nd Sem Class ScheduleEngidÎncă nu există evaluări
- Overview and Project ProposalDocument3 paginiOverview and Project Proposal916153Încă nu există evaluări
- ProposalDocument14 paginiProposalEngidÎncă nu există evaluări
- Kotasthan - AMR Using WIreless Sensor NetworkDocument3 paginiKotasthan - AMR Using WIreless Sensor NetworkEngidÎncă nu există evaluări
- Research Topics in Science and Technology Ver4Document6 paginiResearch Topics in Science and Technology Ver4EngidÎncă nu există evaluări
- Energy 05 00667Document24 paginiEnergy 05 00667EngidÎncă nu există evaluări
- Design and Simulation of Standalone Hybrid Solar Biomass Electricity Generation System For A Rural Village in EthiopiaDocument5 paginiDesign and Simulation of Standalone Hybrid Solar Biomass Electricity Generation System For A Rural Village in EthiopiaEngidÎncă nu există evaluări
- 9.rani - Inegrated Smart Energy Meter Using GSMDocument4 pagini9.rani - Inegrated Smart Energy Meter Using GSMEngidÎncă nu există evaluări
- Proposal 1Document14 paginiProposal 1Engid100% (1)
- Design and Implementation of AMR System Using Arduino and Digital Energy MeterDocument4 paginiDesign and Implementation of AMR System Using Arduino and Digital Energy MeterEngidÎncă nu există evaluări
- (Project) INTEGRATION OF SOLAR PV INTO GRIDDocument13 pagini(Project) INTEGRATION OF SOLAR PV INTO GRIDMadhavan. M /013Încă nu există evaluări
- Exceptional Sound and RuggednessDocument2 paginiExceptional Sound and RuggednessmegadeÎncă nu există evaluări
- ES 1 MarkDocument5 paginiES 1 MarkVenkatesan SundaramÎncă nu există evaluări
- Jntu Kak 2 2 Ece Emtl Set 3Document6 paginiJntu Kak 2 2 Ece Emtl Set 3himeshemraanÎncă nu există evaluări
- CH Digital Temperature Controller Instruction ManualDocument10 paginiCH Digital Temperature Controller Instruction Manualgurguri5691100% (1)
- Ref 550Document14 paginiRef 550Dario AbelÎncă nu există evaluări
- COST 288 Nanoscale and Ultrafast PhotonicsDocument145 paginiCOST 288 Nanoscale and Ultrafast Photonicsma860930Încă nu există evaluări
- Pflex Ap011 - Conexion Electrica Variadoes 40 525Document132 paginiPflex Ap011 - Conexion Electrica Variadoes 40 525CarlosOtinianoÎncă nu există evaluări
- Notes On Essential of ItDocument9 paginiNotes On Essential of ItDrRam Singh KambojÎncă nu există evaluări
- HETT401 Seminar Assignment 1 (HETT Students)Document2 paginiHETT401 Seminar Assignment 1 (HETT Students)Victor BasviÎncă nu există evaluări
- Module 3 Test - Revisión Del IntentoDocument5 paginiModule 3 Test - Revisión Del Intentocaren rodriguezÎncă nu există evaluări
- Rm0433 Reference Manual: Stm32H742, Stm32H743/753 and Stm32H750 Value Line Advanced Arm - Based 32-Bit McusDocument3.353 paginiRm0433 Reference Manual: Stm32H742, Stm32H743/753 and Stm32H750 Value Line Advanced Arm - Based 32-Bit McusAndres GonzalezÎncă nu există evaluări
- Dielectric Absorption 3Document13 paginiDielectric Absorption 3pappo1234Încă nu există evaluări
- Works With QSC DCP 200 and 300 Cinema Processors To Create The Most Powerful Networked Audio Solution For CinemaDocument2 paginiWorks With QSC DCP 200 and 300 Cinema Processors To Create The Most Powerful Networked Audio Solution For CinemaguerreroÎncă nu există evaluări
- 15.6 TDS - Hlb-03-18-Cw-Al-SqDocument1 pagină15.6 TDS - Hlb-03-18-Cw-Al-SqGuru HbkÎncă nu există evaluări
- Brochure EM3DS 12Document2 paginiBrochure EM3DS 12dmfa061Încă nu există evaluări
- Eetop - CN - FAST FOURIER TRANSFORM PROCESSOR DESIGNDocument186 paginiEetop - CN - FAST FOURIER TRANSFORM PROCESSOR DESIGNCarlos CalderonÎncă nu există evaluări
- iVMS-5200 Hikvision Device CompatibilityDocument16 paginiiVMS-5200 Hikvision Device CompatibilityJose Luis PfluckerÎncă nu există evaluări
- SV 31 Acoustic Calibrator: User's ManualDocument10 paginiSV 31 Acoustic Calibrator: User's ManualThupten Gedun Kelvin OngÎncă nu există evaluări
- Mla Varistor Series: Surface Mount Multilayer Varistors (MLVS)Document10 paginiMla Varistor Series: Surface Mount Multilayer Varistors (MLVS)jakalae5263Încă nu există evaluări
- Intro to Capacitors: Properties, Calculations & ApplicationsDocument15 paginiIntro to Capacitors: Properties, Calculations & ApplicationsJoshua RodriguezÎncă nu există evaluări
- THE 8051 MICROCONTROLLERDocument49 paginiTHE 8051 MICROCONTROLLERSabuj Ahmed100% (1)
- Variator TensiuneDocument8 paginiVariator TensiuneCristyMitre100% (1)
- 300FLSR 25Document3 pagini300FLSR 25dip461Încă nu există evaluări
- Advanced Paper Cutting Machine Using ARM7: SenseDocument3 paginiAdvanced Paper Cutting Machine Using ARM7: SensechotichanduÎncă nu există evaluări
- Apple Macbook Pro 13 A1278 (K24, 820-2530)Document81 paginiApple Macbook Pro 13 A1278 (K24, 820-2530)Vio Chi100% (1)
- Teachers Guide2Document32 paginiTeachers Guide2abenezer1425Încă nu există evaluări
- CD4070B, CD4077B: Features DescriptionDocument7 paginiCD4070B, CD4077B: Features DescriptionPutri Rose Amanda PuriÎncă nu există evaluări
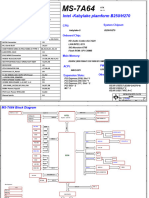
- Intel - Kabylake Plamform B250/H270: System Chipset: CpuDocument64 paginiIntel - Kabylake Plamform B250/H270: System Chipset: CpuAngel Guerrero OlivoÎncă nu există evaluări
- S28 PDFDocument109 paginiS28 PDFSonu Alam100% (1)