S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- 646D841 EN 01 1601wDocument4 pagini646D841 EN 01 1601wHaseeb KazmiÎncă nu există evaluări
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Work StudyDocument58 paginiWork StudyHaseeb KazmiÎncă nu există evaluări
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Instruction Set For Time StudyDocument8 paginiInstruction Set For Time StudyHaseeb KazmiÎncă nu există evaluări
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- LabVIEW Programming ExamplesDocument23 paginiLabVIEW Programming Examplesayeshabanu_momin0% (1)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Dog Dissection ProcedureDocument20 paginiDog Dissection ProcedureChristine Joyce NavarroÎncă nu există evaluări
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Anatomy 1800 Multiple Choice Questions Fitzgerald Maeve Full ChapterDocument51 paginiAnatomy 1800 Multiple Choice Questions Fitzgerald Maeve Full Chapterjoann.meyer664100% (4)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Lifern's Anatomy: Limbs & Trunk: Thorax.................................................. 32Document162 paginiLifern's Anatomy: Limbs & Trunk: Thorax.................................................. 32natheÎncă nu există evaluări
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- MouvementDocument42 paginiMouvementRubenÎncă nu există evaluări
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Exercise Bird Dog.13Document2 paginiExercise Bird Dog.13Waldir Martins NetoÎncă nu există evaluări
- Anatomy Practical OSPEDocument33 paginiAnatomy Practical OSPEAbdi Ñãśìr Møhàmèď ŚàĺàhÎncă nu există evaluări
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Muscles WorksheetDocument3 paginiMuscles Worksheetcongcong tvÎncă nu există evaluări
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- Ryan J. Warth, Peter J. Millett Auth. Physical Examination of The Shoulder An Evidence-Based ApproachDocument280 paginiRyan J. Warth, Peter J. Millett Auth. Physical Examination of The Shoulder An Evidence-Based ApproachAndrei R Lupu100% (1)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Anatomy, Shoulder and Upper Limb, Shoulder MusclesDocument12 paginiAnatomy, Shoulder and Upper Limb, Shoulder MusclesluizamgoÎncă nu există evaluări
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- Axillary Nerve Injury Diagnosis and Treatment.6Document8 paginiAxillary Nerve Injury Diagnosis and Treatment.6denesisÎncă nu există evaluări
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Shoulder Muscle Forces and Tendon Excursions During Glenohumeral Abduction in The Scapular Plane - McMahon Et Al. 1995Document10 paginiShoulder Muscle Forces and Tendon Excursions During Glenohumeral Abduction in The Scapular Plane - McMahon Et Al. 1995Frangolho JoãoÎncă nu există evaluări
- Push Up GuideDocument11 paginiPush Up GuideRafaela NarbaesÎncă nu există evaluări
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- Shoulder Joint AssessmentDocument92 paginiShoulder Joint Assessmentsonali tushamerÎncă nu există evaluări
- Trigger Points Quick Reference Student ResourceDocument129 paginiTrigger Points Quick Reference Student ResourceViviana Rolón100% (2)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Atlas of Orthopedic Surgical Procedures of The Dog and CatDocument244 paginiAtlas of Orthopedic Surgical Procedures of The Dog and Catשאול רייס100% (4)
- Muscle Control by MaxickDocument47 paginiMuscle Control by Maxickkhirakis100% (7)
- Physio Protocol Anterior Shoulder Dislocation NEW ADD 1Document2 paginiPhysio Protocol Anterior Shoulder Dislocation NEW ADD 1Abner SánchezÎncă nu există evaluări
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
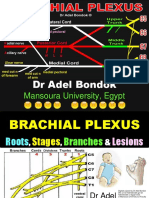
- Brachial Plexus, DR Adel BondokDocument20 paginiBrachial Plexus, DR Adel BondokSafeÎncă nu există evaluări
- Active and Passive InsufficiencyDocument25 paginiActive and Passive Insufficiencydina sharafÎncă nu există evaluări
- Deltopectoral FlapDocument37 paginiDeltopectoral FlapAmbika Luthra100% (1)
- Powerbands Workshop ManualDocument32 paginiPowerbands Workshop Manualharmziie100% (2)
- Sectional Anatomy by MRI and CT - NodrmDocument627 paginiSectional Anatomy by MRI and CT - NodrmEsteban Balcero Zuluaga100% (2)
- Manual Resistance ExercisesDocument12 paginiManual Resistance ExercisesTes TingÎncă nu există evaluări
- Schwab Bench Ebook FINAL Rev PDFDocument79 paginiSchwab Bench Ebook FINAL Rev PDFWullie Brown100% (2)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Applied Biomechanics of SwimmingDocument19 paginiApplied Biomechanics of SwimmingBart Merkelbach100% (1)
- HF Quiz LO1 1.2 Muscular System Quiz 1Document4 paginiHF Quiz LO1 1.2 Muscular System Quiz 1BAYANI VICENCIOÎncă nu există evaluări
- Exergenie Circa 1970 ManualDocument34 paginiExergenie Circa 1970 ManualJosé Antonio Sánchez AménÎncă nu există evaluări
- Reverse Total Shoulder Arthroplasty - KingDocument10 paginiReverse Total Shoulder Arthroplasty - Kingapi-467445554100% (1)
- The Best Exercise You'Ve Never Heard ofDocument71 paginiThe Best Exercise You'Ve Never Heard ofDI HartmanÎncă nu există evaluări
- The Physics of Fitness - Douglas BrignoleDocument531 paginiThe Physics of Fitness - Douglas BrignoleПавел Кръстев100% (13)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)