S-ar putea să vă placă și
- Power Supply Projects: A Collection of Innovative and Practical Design ProjectsDe la EverandPower Supply Projects: A Collection of Innovative and Practical Design ProjectsEvaluare: 3 din 5 stele3/5 (2)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2De la EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Încă nu există evaluări
- 110 Waveform Generator Projects for the Home ConstructorDe la Everand110 Waveform Generator Projects for the Home ConstructorEvaluare: 4 din 5 stele4/5 (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1De la EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Evaluare: 2.5 din 5 stele2.5/5 (3)
- Audio IC Projects: A Collection of Useful Circuits Based on Readily Available ChipsDe la EverandAudio IC Projects: A Collection of Useful Circuits Based on Readily Available ChipsÎncă nu există evaluări
- Manual Servico TV LCD Philips 42pfl3604Document67 paginiManual Servico TV LCD Philips 42pfl3604abe_1962100% (1)
- Beginning Digital Electronics through ProjectsDe la EverandBeginning Digital Electronics through ProjectsEvaluare: 5 din 5 stele5/5 (1)
- Newnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1De la EverandNewnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1Evaluare: 4.5 din 5 stele4.5/5 (3)
- Lesson 1 Introduction To IctDocument35 paginiLesson 1 Introduction To IctDandreb Sardan100% (1)
- Dokumen - Tips Tessent Ijtag Student Workbook Amazon s3 5 Migrating Designs Top Down VersusDocument11 paginiDokumen - Tips Tessent Ijtag Student Workbook Amazon s3 5 Migrating Designs Top Down VersusrajitkarmakarÎncă nu există evaluări
- 1 Safety Instructions: Power SupplyDocument5 pagini1 Safety Instructions: Power SupplyMaicon CoutinhoÎncă nu există evaluări
- RMU710B-1 Autres Fiches en PDFDocument10 paginiRMU710B-1 Autres Fiches en PDFe-genieclimatique.comÎncă nu există evaluări
- 6SL3130 6ae15 0aa0 Smart Line Module Sinamics S120 Siemens ManualDocument7 pagini6SL3130 6ae15 0aa0 Smart Line Module Sinamics S120 Siemens ManualdalyÎncă nu există evaluări
- Drive Training 3Document122 paginiDrive Training 3akshaygautam19797Încă nu există evaluări
- Capzero-2 Family Datasheet 0-770726Document9 paginiCapzero-2 Family Datasheet 0-770726Wagner MirandaÎncă nu există evaluări
- HCPL 7601 AvagoDocument13 paginiHCPL 7601 AvagoSyed Khawar MukhtarÎncă nu există evaluări
- Pacific Antenna Easy TR Switch KitDocument8 paginiPacific Antenna Easy TR Switch KitRu RickjamesÎncă nu există evaluări
- Tesys D-Line Four Pole Contactor: Key FeaturesDocument1 paginăTesys D-Line Four Pole Contactor: Key FeaturesMohamed SaadÎncă nu există evaluări
- Telwin Technology 145 165 200Document12 paginiTelwin Technology 145 165 200Daniel-Claudiu-HusanuÎncă nu există evaluări
- TV Philips 29PT9457 - 85Document54 paginiTV Philips 29PT9457 - 85Jhonnathan LacroxÎncă nu există evaluări
- Datasheet - BO04A01KNX - ENG - ITADocument2 paginiDatasheet - BO04A01KNX - ENG - ITAVishal SuryawaniÎncă nu există evaluări
- Beko 14.2 Chassis Full TV SMDocument34 paginiBeko 14.2 Chassis Full TV SMJosep Maria Bargallo MoyaÎncă nu există evaluări
- HCPL 061aDocument19 paginiHCPL 061aMaria TzagarakiÎncă nu există evaluări
- 02 40058 02 enDocument4 pagini02 40058 02 enShirin AzadiÎncă nu există evaluări
- Philips 21pt9457 Chassis Sk4.0l-Ca PDFDocument56 paginiPhilips 21pt9457 Chassis Sk4.0l-Ca PDFJuan Garcia HernandezÎncă nu există evaluări
- Paradise Ku-Band BUCsDocument9 paginiParadise Ku-Band BUCsoppottÎncă nu există evaluări
- IDTQS3VH16233 Bus Switch PDFDocument8 paginiIDTQS3VH16233 Bus Switch PDFm3y54mÎncă nu există evaluări
- Philips 21PT5438Philips 21PT5438Document52 paginiPhilips 21PT5438Philips 21PT5438Manoj Sebastian0% (1)
- Atmel 11207 SAMA5D3x Schematic Checklist Application NoteDocument17 paginiAtmel 11207 SAMA5D3x Schematic Checklist Application Notesuduku007Încă nu există evaluări
- 162 Vts 2-Wire Seismic Vibration Transmitter: Installation ManualDocument8 pagini162 Vts 2-Wire Seismic Vibration Transmitter: Installation ManualEciclei Lima FroesÎncă nu există evaluări
- TV Led Philips Chassi LC9.2LADocument85 paginiTV Led Philips Chassi LC9.2LAJandira Santos0% (1)
- sk4 (1) 1LDocument49 paginisk4 (1) 1LWall BrysonÎncă nu există evaluări
- 42PFL3604Document67 pagini42PFL3604Robert Van SchijndelÎncă nu există evaluări
- CAN-Bus-capable Accessory Modules Type PLVC-CAN: 1. General InformationDocument4 paginiCAN-Bus-capable Accessory Modules Type PLVC-CAN: 1. General InformationAdamÎncă nu există evaluări
- NCV7351, NCV7351F High Speed CAN, CAN FD Transceiver: Marking DiagramDocument17 paginiNCV7351, NCV7351F High Speed CAN, CAN FD Transceiver: Marking DiagramJose Otilio Chavez CantuÎncă nu există evaluări
- NCV7351-D CAN TransceiverDocument13 paginiNCV7351-D CAN TransceiverahmedÎncă nu există evaluări
- TDAX021101Document4 paginiTDAX021101Abdul KurniadiÎncă nu există evaluări
- 02 40057 02 enDocument4 pagini02 40057 02 enGökmen ŞirinÎncă nu există evaluări
- LG Beko 28cz10rx Service ManualDocument32 paginiLG Beko 28cz10rx Service ManualAlan ScarfidiÎncă nu există evaluări
- Mini Contactors Control RelaysDocument7 paginiMini Contactors Control Relayssalami mumeenÎncă nu există evaluări
- Applicationnote: High Power Wireless Power Transfer For The Industrial EnvironmentDocument25 paginiApplicationnote: High Power Wireless Power Transfer For The Industrial EnvironmentMani RathnamÎncă nu există evaluări
- ACX 57xx Series Controller Installation InstructionsDocument12 paginiACX 57xx Series Controller Installation Instructionsanas.iajÎncă nu există evaluări
- LNT PricelistDocument104 paginiLNT PricelistmbhangaleÎncă nu există evaluări
- Ficha TècnicaDocument2 paginiFicha TècnicaDiego Gomez CaroÎncă nu există evaluări
- 16-Channel Analogue Input Termination Card: Triguard SC300E Tai16AirDocument11 pagini16-Channel Analogue Input Termination Card: Triguard SC300E Tai16AirSanthosh Paul FernandesÎncă nu există evaluări
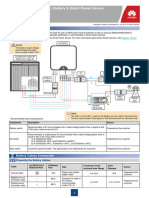
- Guia Rápido - Bateria e Medidor Inteligente - HuaweiDocument19 paginiGuia Rápido - Bateria e Medidor Inteligente - HuaweiprojetosnortaoÎncă nu există evaluări
- HCPL 2631 AvagoDocument21 paginiHCPL 2631 AvagoTrung Nguyên VõÎncă nu există evaluări
- Qtan0048 - Ex - Mxt224 PCB FPCB Layout GuidelinesDocument12 paginiQtan0048 - Ex - Mxt224 PCB FPCB Layout GuidelinesSuhaas SraoÎncă nu există evaluări
- 1558 6n137 PDFDocument21 pagini1558 6n137 PDFСергей ЖивиловÎncă nu există evaluări
- Colour Television Chassis: Block Diagrams, Testpoint Overviews, and WaveformsDocument68 paginiColour Television Chassis: Block Diagrams, Testpoint Overviews, and WaveformsMary Flynn Nettles100% (1)
- Acx ControladoraDocument12 paginiAcx ControladoraDAVIDÎncă nu există evaluări
- Philips L7.3a Aa Chassis TV SMDocument49 paginiPhilips L7.3a Aa Chassis TV SMRoger_74Încă nu există evaluări
- Service Manual: Colour TelevisionDocument22 paginiService Manual: Colour TelevisionMoroșan CristiÎncă nu există evaluări
- ENG DS DSD 25 Family A4Document7 paginiENG DS DSD 25 Family A4hedayatÎncă nu există evaluări
- Controlgear and Starters Product CatalogDocument104 paginiControlgear and Starters Product CatalogSpardha GuptaÎncă nu există evaluări
- Atmel QTouch Layout Quick Reference GuideDocument4 paginiAtmel QTouch Layout Quick Reference GuideAnonymous nMZN9dJvaZÎncă nu există evaluări
- ADC0831-N/ADC0832-N/ADC0834-N/ADC0838-N 8-Bit Serial I/O A/D Converters With Multiplexer OptionsDocument40 paginiADC0831-N/ADC0832-N/ADC0834-N/ADC0838-N 8-Bit Serial I/O A/D Converters With Multiplexer OptionsvictorÎncă nu există evaluări
- Adc0831 NDocument41 paginiAdc0831 Nekjrfhb,dsmÎncă nu există evaluări
- Adrci SHDocument3 paginiAdrci SHMohlapamafsi MothupiÎncă nu există evaluări
- Getting Started in IAB (061-120)Document60 paginiGetting Started in IAB (061-120)Anh Kha Võ DânÎncă nu există evaluări
- What Is MIME?: MIME As An Internet ProtocolDocument8 paginiWhat Is MIME?: MIME As An Internet Protocolmyprofile0225Încă nu există evaluări
- RE - 17328 RexrothDocument32 paginiRE - 17328 RexrothLeo VanÎncă nu există evaluări
- Language Focus PrefixesDocument7 paginiLanguage Focus PrefixesrhinaÎncă nu există evaluări
- Discrete StructuresDocument3 paginiDiscrete StructuresVamsi VersatileÎncă nu există evaluări
- Built-In Control Panel CP66xx: Installation and Operating Instructions ForDocument21 paginiBuilt-In Control Panel CP66xx: Installation and Operating Instructions ForAntonio Carlos CardosoÎncă nu există evaluări
- How To Configure FTP Server in Linux by MIKDocument7 paginiHow To Configure FTP Server in Linux by MIKSoumik BasuÎncă nu există evaluări
- c04 Proe WF 5.0Document40 paginic04 Proe WF 5.0kamran akmalÎncă nu există evaluări
- Cloud Native Java Designing Resilient Systems With Spring Boot Spring Cloud and Cloud FoundryDocument41 paginiCloud Native Java Designing Resilient Systems With Spring Boot Spring Cloud and Cloud Foundryparag27878Încă nu există evaluări
- Virtual Memory Systems: 04/16/22 Crowley OS Chap. 12 1Document75 paginiVirtual Memory Systems: 04/16/22 Crowley OS Chap. 12 1navecÎncă nu există evaluări
- External Alarm With 2 DUL Boards in RBS6601Document4 paginiExternal Alarm With 2 DUL Boards in RBS6601arkom0% (2)
- A 2D Electromagnetic Scattering Solver For MatlabDocument23 paginiA 2D Electromagnetic Scattering Solver For MatlabjalopeztÎncă nu există evaluări
- 2018 03 Lean Startup Und MVPDocument46 pagini2018 03 Lean Startup Und MVPSabila SyarafinaÎncă nu există evaluări
- Course Slot and Faculty DetailsDocument26 paginiCourse Slot and Faculty DetailsPranjal RuhelaÎncă nu există evaluări
- Unit 7 Protection and SecurityDocument18 paginiUnit 7 Protection and SecurityMeghana AmmuÎncă nu există evaluări
- ControlFile ManagementDocument3 paginiControlFile Managementsss pppÎncă nu există evaluări
- Continuous Queries Over Data Streams: Shivnath Babu and Jennifer WidomDocument12 paginiContinuous Queries Over Data Streams: Shivnath Babu and Jennifer WidomLeo VásquezÎncă nu există evaluări
- Global Maintenance and Reliability Indicators - Flyer - GMARI - V3 PDFDocument2 paginiGlobal Maintenance and Reliability Indicators - Flyer - GMARI - V3 PDFgecko232243100% (1)
- Apache Airflow TRAINING12532Document3 paginiApache Airflow TRAINING12532Sreenivas KalahastiÎncă nu există evaluări
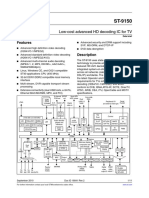
- ST 9150AUC STMicroelectronics PDFDocument11 paginiST 9150AUC STMicroelectronics PDFIbrain MoranÎncă nu există evaluări
- Introduction To Ict NotesDocument152 paginiIntroduction To Ict NotesRichard ScansÎncă nu există evaluări
- Geoenzo ManualDocument46 paginiGeoenzo ManualpaglafouÎncă nu există evaluări
- Introduction To Big Data ManagementDocument9 paginiIntroduction To Big Data ManagementNurul Akmar EmranÎncă nu există evaluări
- CrystalBall User ManualDocument414 paginiCrystalBall User ManualChandu GandiÎncă nu există evaluări
- Instructions For Using The Walden APA 6 DBA Template v3Document10 paginiInstructions For Using The Walden APA 6 DBA Template v3Terry LongÎncă nu există evaluări
- Product Catalog LR-SeriesDocument8 paginiProduct Catalog LR-SeriesHudionoHoodÎncă nu există evaluări