S-ar putea să vă placă și
- Domine Los Drones, Guía Básica para Comenzar a Ganar Dinero con los Drones: Fotografía/Comercial, Tecnología e Ingeniería, RobóticaDe la EverandDomine Los Drones, Guía Básica para Comenzar a Ganar Dinero con los Drones: Fotografía/Comercial, Tecnología e Ingeniería, RobóticaEvaluare: 5 din 5 stele5/5 (1)
- Robotica: Transmisiones y Reductores y Sistemas de AccionDocument4 paginiRobotica: Transmisiones y Reductores y Sistemas de AccionDiego Alejandro Ledesma FloresÎncă nu există evaluări
- Estructura Mecánica de Un RobotDocument9 paginiEstructura Mecánica de Un RobotsistemaelectricoÎncă nu există evaluări
- Elementos TerminalesDocument20 paginiElementos TerminalesMoises MartinezÎncă nu există evaluări
- Ecuaciones de EulerDocument16 paginiEcuaciones de EulerjosehernandezmartinÎncă nu există evaluări
- Circuitos Combinacionales y SecuencialesDocument13 paginiCircuitos Combinacionales y SecuencialesEduardo DF7Încă nu există evaluări
- Practica #7 Apilado de 4 CajasDocument8 paginiPractica #7 Apilado de 4 CajasDante Calamaco RodriguezÎncă nu există evaluări
- Sistema de Combustible TBIDocument5 paginiSistema de Combustible TBIAlberto SernaÎncă nu există evaluări
- Aplicacion en MATLAB y SIMULINK PDFDocument6 paginiAplicacion en MATLAB y SIMULINK PDFchase200385Încă nu există evaluări
- Historia Del Motor Eléctrico PDFDocument2 paginiHistoria Del Motor Eléctrico PDFcharwins100% (1)
- Análisis Sintáctico y Matriz PredictivaDocument10 paginiAnálisis Sintáctico y Matriz PredictivaIrvin G. Contreras García0% (1)
- Monografia Diseño Mecanico 2Document41 paginiMonografia Diseño Mecanico 2César Carmona BernillaÎncă nu există evaluări
- Método de Integración Por SustituciónDocument76 paginiMétodo de Integración Por SustituciónAndres Bueno100% (1)
- Sistemas de Accionamiento de Los RobotsDocument8 paginiSistemas de Accionamiento de Los RobotsGiovanni MendezÎncă nu există evaluări
- Sintonización de Controladores PID y PIDocument7 paginiSintonización de Controladores PID y PIIleanaMontilvaÎncă nu există evaluări
- Protocolo ProfibusDocument4 paginiProtocolo ProfibusRODRIGO ALEJANDRO MANOSALVA PALMAÎncă nu există evaluări
- Tabla Comparativa de Motores para ProyectosDocument2 paginiTabla Comparativa de Motores para ProyectosJuan PerezÎncă nu există evaluări
- Análisis y Diseño de Sistemas Con UMLDocument64 paginiAnálisis y Diseño de Sistemas Con UMLCarlos Arroyo GabinoÎncă nu există evaluări
- Trabajo Final ElectronicaDocument19 paginiTrabajo Final ElectronicaYouel Ralfy Beras MartinezÎncă nu există evaluări
- Conversor BCD a binario con funciones y mapas KDocument12 paginiConversor BCD a binario con funciones y mapas KStalin NasimbaÎncă nu există evaluări
- Sist Control Capitulo2Document61 paginiSist Control Capitulo2Jeff BybeÎncă nu există evaluări
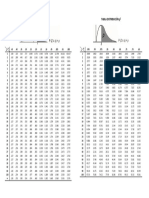
- Distribución χ2: tabla de valores críticosDocument1 paginăDistribución χ2: tabla de valores críticosEdward LcÎncă nu există evaluări
- Manual PLC SLC 500 CPU L32EDocument189 paginiManual PLC SLC 500 CPU L32EPedro VeraÎncă nu există evaluări
- Diagrama de AlambradoDocument7 paginiDiagrama de AlambradoJose manuel Romero floresÎncă nu există evaluări
- Componentes de ElectroneumaticaDocument6 paginiComponentes de ElectroneumaticaMónica MárquezÎncă nu există evaluări
- Sistema de Banda TransportadoraDocument10 paginiSistema de Banda TransportadoraJhorman DiazGranadosÎncă nu există evaluări
- Analisis Grafico de Velocidad y AceleracionDocument7 paginiAnalisis Grafico de Velocidad y AceleracionBrizelThaisNegronCabreraÎncă nu există evaluări
- Exposicion Circuitos Tiristor (SCR)Document5 paginiExposicion Circuitos Tiristor (SCR)Genaro BarrientosÎncă nu există evaluări
- 3.3 Diseño de Controladores Por El LGRDocument9 pagini3.3 Diseño de Controladores Por El LGRDavid Garza HipolitoÎncă nu există evaluări
- Transductores Eléctricos de PresiónDocument7 paginiTransductores Eléctricos de PresiónDavid R MéndezÎncă nu există evaluări
- Control ON-OFFDocument10 paginiControl ON-OFFRubén RiveraÎncă nu există evaluări
- Robot KUKA R6Document6 paginiRobot KUKA R6Steven MonárrezÎncă nu există evaluări
- Otras Familias Lógicas de Circuitos IntegradosDocument17 paginiOtras Familias Lógicas de Circuitos IntegradosRicardo Jarquin AndurayÎncă nu există evaluări
- Polígonos de aceleración en mecanismosDocument17 paginiPolígonos de aceleración en mecanismosRoger PeñaÎncă nu există evaluări
- Proyecto y Diseño 2010Document246 paginiProyecto y Diseño 2010Mario ArenaÎncă nu există evaluări
- Practica4 - ROBOTICAS MATLABDocument15 paginiPractica4 - ROBOTICAS MATLABferocilloÎncă nu există evaluări
- B) Tornos Caracteristicas ProduccionDocument7 paginiB) Tornos Caracteristicas ProduccionFranco Javier ArjonaÎncă nu există evaluări
- Práctica de Laboratorio # 1 Principios de Circuitos EléctricosDocument13 paginiPráctica de Laboratorio # 1 Principios de Circuitos EléctricosJUAN ESTEBAN ZULUAGA PAREDESÎncă nu există evaluări
- Estructuras de Control Arduino PDFDocument12 paginiEstructuras de Control Arduino PDFDavid Delgado Martinez100% (1)
- GD&T: Tolerancias geométricas y dimensionalesDocument16 paginiGD&T: Tolerancias geométricas y dimensionalesEdson MarquezÎncă nu există evaluări
- Control Digital DirectoDocument4 paginiControl Digital DirectoCristianGabrielSanchezNazrÎncă nu există evaluări
- Robot 3gdlDocument6 paginiRobot 3gdlflavioscrÎncă nu există evaluări
- G15 command cancel polar coordinates modeDocument1 paginăG15 command cancel polar coordinates modeJesús Tenorio QuevedoÎncă nu există evaluări
- Control preciso posición eje con servomotorDocument5 paginiControl preciso posición eje con servomotorHumberto José Reyes CevallosÎncă nu există evaluări
- Arquitectura PLC y señalesDocument3 paginiArquitectura PLC y señalesCristhian GuidoÎncă nu există evaluări
- SLC Lab 6Document6 paginiSLC Lab 6davidvalenÎncă nu există evaluări
- Unidad 2 Numeros AleatoriosDocument51 paginiUnidad 2 Numeros AleatoriosYenn MÎncă nu există evaluări
- DiseñoLevaSolidworksDocument37 paginiDiseñoLevaSolidworksFlavioÎncă nu există evaluări
- Mecanica para La Automatizacion Saber I Unidad I PDFDocument24 paginiMecanica para La Automatizacion Saber I Unidad I PDFChristian peñaÎncă nu există evaluări
- Modelado y simulación de sistemas con MATLABDocument6 paginiModelado y simulación de sistemas con MATLABRodrigo LimaÎncă nu există evaluări
- Control de Velocidad de Motores de CC Con PWMDocument12 paginiControl de Velocidad de Motores de CC Con PWMNelson Lopez CuestasÎncă nu există evaluări
- Práctica 1Document15 paginiPráctica 1Victor MaresÎncă nu există evaluări
- Funcionamiento de cajas automáticas Dynaflow y PowerglideDocument7 paginiFuncionamiento de cajas automáticas Dynaflow y PowerglideAndres SanizacaÎncă nu există evaluări
- Modelos de Regresion MultipleDocument11 paginiModelos de Regresion MultipleAn-Hell De CrystalÎncă nu există evaluări
- Servomotores y Motores A PasosDocument9 paginiServomotores y Motores A PasosHector Alejandro Bahena Vazquez100% (1)
- Entregable 1Document7 paginiEntregable 1Froylan MezaÎncă nu există evaluări
- Informacion Abb Irb 140Document11 paginiInformacion Abb Irb 140Lonmar L. Lentch LopezÎncă nu există evaluări
- Cuestionario de Ingeniería ConcurrenteDocument2 paginiCuestionario de Ingeniería ConcurrenteJose TorneÎncă nu există evaluări
- Vehículos AutónomosDocument7 paginiVehículos AutónomosAndrea Luzón100% (1)
- Proyecto Vehiculo AutonomoDocument13 paginiProyecto Vehiculo AutonomoChris Marce Monzon100% (1)
- Sistema HeredadoDocument2 paginiSistema HeredadoZoilo Puma QuicañoÎncă nu există evaluări
- Análisis de VarianzaDocument4 paginiAnálisis de VarianzaZoilo Puma QuicañoÎncă nu există evaluări
- Sistema HeredadoDocument2 paginiSistema HeredadoZoilo Puma QuicañoÎncă nu există evaluări
- Pruebas de Hipótesis para MediasDocument11 paginiPruebas de Hipótesis para MediasZoilo Puma QuicañoÎncă nu există evaluări
- CÁNCERDocument8 paginiCÁNCERZoilo Puma QuicañoÎncă nu există evaluări
- Planeación y Control en La ProducciónDocument13 paginiPlaneación y Control en La ProducciónZoilo Puma QuicañoÎncă nu există evaluări
- Introducción al voleibol: reglas, historia y técnicas básicasDocument10 paginiIntroducción al voleibol: reglas, historia y técnicas básicasZoilo Puma QuicañoÎncă nu există evaluări
- Orientacion VocacionalDocument13 paginiOrientacion VocacionalZoilo Puma QuicañoÎncă nu există evaluări
- Las Técnicas de InvestigaciónDocument15 paginiLas Técnicas de InvestigaciónZoilo Puma QuicañoÎncă nu există evaluări
- Los Sistemas HeredadosDocument6 paginiLos Sistemas Heredadoscriminalz crew AFS famili0% (1)
- ArequipaDocument7 paginiArequipaAlvaro SaicoÎncă nu există evaluări
- ArequipaDocument4 paginiArequipaHector EnriqueÎncă nu există evaluări
- Historia de La Provincia de IslayDocument2 paginiHistoria de La Provincia de IslayZoilo Puma QuicañoÎncă nu există evaluări
- Distres RespiratorioDocument12 paginiDistres RespiratorioZoilo Puma QuicañoÎncă nu există evaluări
- Historia Del Automovil en America PDFDocument42 paginiHistoria Del Automovil en America PDFZoilo Puma QuicañoÎncă nu există evaluări
- La GlobalizaciónDocument12 paginiLa GlobalizaciónZoilo Puma QuicañoÎncă nu există evaluări
- Definiciones de derechos humanosDocument2 paginiDefiniciones de derechos humanosZoilo Puma QuicañoÎncă nu există evaluări
- Autonomia VoluntadDocument7 paginiAutonomia Voluntadmaximo puma quicañoÎncă nu există evaluări
- Universidad Veracruzana Facultad de Medicina Veterinaria y Zootecnia Tesis Recepcional 2010Document2 paginiUniversidad Veracruzana Facultad de Medicina Veterinaria y Zootecnia Tesis Recepcional 2010Metametemático IsepÎncă nu există evaluări
- La GlobalizaciónDocument12 paginiLa GlobalizaciónZoilo Puma QuicañoÎncă nu există evaluări
- Factores Psicosociales Que Intervienen en La Adherencia Al TratamientoDocument36 paginiFactores Psicosociales Que Intervienen en La Adherencia Al TratamientoZoilo Puma QuicañoÎncă nu există evaluări
- Estrategias para El Desarrollo de La Psicomotricidad PDFDocument101 paginiEstrategias para El Desarrollo de La Psicomotricidad PDFSamuel Herazo JarabaÎncă nu există evaluări
- Semana 3, Clasificacion de Riesgos y Asociación A Los Metodos de ExplotaciónDocument22 paginiSemana 3, Clasificacion de Riesgos y Asociación A Los Metodos de ExplotaciónZoilo Puma QuicañoÎncă nu există evaluări
- Cna Modulo 4 El Presente de La Humanidad PDFDocument17 paginiCna Modulo 4 El Presente de La Humanidad PDFZoilo Puma QuicañoÎncă nu există evaluări
- Gobiernos LocalesDocument2 paginiGobiernos LocalesAlexis Hidalgo OrtizÎncă nu există evaluări
- Aplicar Estrategias Motivadoras Que Fortalezcan La Motricidad FinaDocument12 paginiAplicar Estrategias Motivadoras Que Fortalezcan La Motricidad FinaZoilo Puma QuicañoÎncă nu există evaluări
- Ordenanzas Sobre Comercio Ambulatorio en PerúDocument2 paginiOrdenanzas Sobre Comercio Ambulatorio en PerúDavid Felipe Camacho AlbaÎncă nu există evaluări
- Mercado de Dinero y Mercado de DivisaDocument8 paginiMercado de Dinero y Mercado de DivisaZoilo Puma QuicañoÎncă nu există evaluări
- Qué Aspectos de Mi Comportamiento 111111111111Document2 paginiQué Aspectos de Mi Comportamiento 111111111111Zoilo Puma QuicañoÎncă nu există evaluări
- Antecedentes RoboticaDocument9 paginiAntecedentes RoboticaManoloÎncă nu există evaluări
- Ejercicios ELE C1Document2 paginiEjercicios ELE C1LoratadinaÎncă nu există evaluări
- RoboCode PDFDocument106 paginiRoboCode PDFFremianÎncă nu există evaluări
- Vehiculos AutonomosDocument22 paginiVehiculos AutonomosEucaryÎncă nu există evaluări
- Tecnología LidarDocument17 paginiTecnología LidarReynaldo Baldini100% (1)
- Aprendizaje AutomaticoDocument6 paginiAprendizaje AutomaticoFrancisco Javier Diaz PincheiraÎncă nu există evaluări
- Coche Actual - 01 Junio 2018Document84 paginiCoche Actual - 01 Junio 2018todopepeÎncă nu există evaluări
- 2 - Javier Ruiz Del Solar - U. ChileDocument49 pagini2 - Javier Ruiz Del Solar - U. ChileJhan Huayra0% (1)
- E Klasse W213 Katalog 0316 04 ESP EMBDocument70 paginiE Klasse W213 Katalog 0316 04 ESP EMBpanchoÎncă nu există evaluări
- Revista Española de Electrónica731 - Octubre 2015Document118 paginiRevista Española de Electrónica731 - Octubre 2015Hacia la LuzÎncă nu există evaluări
- Transformando el vehículo en un espacio de trabajo móvil y conectadoDocument4 paginiTransformando el vehículo en un espacio de trabajo móvil y conectadoBerthing HerreraÎncă nu există evaluări
- Proyecto Vehiculo AutonomoDocument13 paginiProyecto Vehiculo AutonomoChris Marce Monzon100% (1)
- Vehículos autónomos: estado actual y tecnología claveDocument8 paginiVehículos autónomos: estado actual y tecnología claveZoilo Puma QuicañoÎncă nu există evaluări
- Investigación Cualitativa Vehiculos AutonomosDocument11 paginiInvestigación Cualitativa Vehiculos AutonomosMarcos Lepe De LeonÎncă nu există evaluări
- CRONOLOGIADocument5 paginiCRONOLOGIABryan VelozÎncă nu există evaluări
- Sensores y sistemas anticolisionesDocument39 paginiSensores y sistemas anticolisionesAndrés GuerraÎncă nu există evaluări
- Caso Google Car ExamenDocument2 paginiCaso Google Car Examenwildecn1071% (7)
- Proyecto de Accesibilidad para Personas Con Discapacidad VisualDocument91 paginiProyecto de Accesibilidad para Personas Con Discapacidad VisualRicardo Luis Villanueva Ramos100% (1)
- Navarro Richard Diseño Controlador Neurodifuso Conduccion Autonoma Camion Minero Dos CuerposDocument145 paginiNavarro Richard Diseño Controlador Neurodifuso Conduccion Autonoma Camion Minero Dos CuerposcesarÎncă nu există evaluări
- Coches autónomos, seguridad y desarrollo en la última décadaDocument8 paginiCoches autónomos, seguridad y desarrollo en la última décadaCarlos Rojas ZevallosÎncă nu există evaluări
- Investigación Autos AutonomosDocument44 paginiInvestigación Autos AutonomosJulio Gonzalez38% (8)