S-ar putea să vă placă și
- Giro Rodeghiero SPIE 2014Document13 paginiGiro Rodeghiero SPIE 2014enrico giroÎncă nu există evaluări
- Vortex Lens: Features ApplicationsDocument2 paginiVortex Lens: Features ApplicationsDu RoyÎncă nu există evaluări
- Optical Materials 1Document9 paginiOptical Materials 1Wan Abdul HadiÎncă nu există evaluări
- Thc3 2:00Pm-2:15Pm: Interferometric Inclinometer For Structural MonitoringDocument4 paginiThc3 2:00Pm-2:15Pm: Interferometric Inclinometer For Structural MonitoringAldijana SehicÎncă nu există evaluări
- Juretzko Richter 2006 PDFDocument10 paginiJuretzko Richter 2006 PDFMariÎncă nu există evaluări
- Martin Manufacture of A Combined Primary and Tertiary Mirror For The Large Synoptic Survey TelescopeDocument12 paginiMartin Manufacture of A Combined Primary and Tertiary Mirror For The Large Synoptic Survey TelescopemohamadazareshÎncă nu există evaluări
- Rotman AntennaDocument67 paginiRotman AntennaVinh CamÎncă nu există evaluări
- Schiefspiegler ToolkitDocument5 paginiSchiefspiegler ToolkiteolocosÎncă nu există evaluări
- 0300 v7 PI 80X80 Light Sheet OpticsDocument4 pagini0300 v7 PI 80X80 Light Sheet Opticssir867413140Încă nu există evaluări
- Be A 41 Oc Exp1Document6 paginiBe A 41 Oc Exp1Drunk Driver DetectionÎncă nu există evaluări
- Measured Performance of High Gain Dielectric Lens Antenna in 300 GHZ BandDocument2 paginiMeasured Performance of High Gain Dielectric Lens Antenna in 300 GHZ BandPhan HưngÎncă nu există evaluări
- Optical Sensors - 1Document70 paginiOptical Sensors - 1Tanaka dzapasiÎncă nu există evaluări
- Dokumen - Tips - Solution of Exercises Lecture Optical Design With Zemax DesignwithzemsolutionDocument11 paginiDokumen - Tips - Solution of Exercises Lecture Optical Design With Zemax Designwithzemsolutiontaloxiy869Încă nu există evaluări
- Czech TunerDocument25 paginiCzech TunerNhật Linh TrầnÎncă nu există evaluări
- DOE AnalysisDocument11 paginiDOE Analysiskndprasad01Încă nu există evaluări
- Understanding Optical Specifications Edmund OpticsDocument7 paginiUnderstanding Optical Specifications Edmund OpticsYorche AlternoÎncă nu există evaluări
- Testing of Nonlinear Diamond-Turned ReflaxiconsDocument5 paginiTesting of Nonlinear Diamond-Turned Reflaxiconskndprasad01Încă nu există evaluări
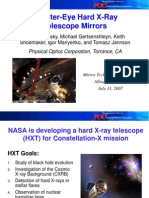
- Lobster Eye Hard X-Ray MirrorsDocument36 paginiLobster Eye Hard X-Ray MirrorsmcanaliÎncă nu există evaluări
- Plane-Parallel Resonator Configuration For High-NA EUV LithographyDocument18 paginiPlane-Parallel Resonator Configuration For High-NA EUV LithographyGary Ryan DonovanÎncă nu există evaluări
- Dokumen - Tips - Solution of Exercises Lecture Optical Design With Zemax Designwit LectureDocument14 paginiDokumen - Tips - Solution of Exercises Lecture Optical Design With Zemax Designwit Lecturetaloxiy869Încă nu există evaluări
- Aberrations Introduced in Off-Axis Testing of Spherical Surfaces - MalacaraDocument5 paginiAberrations Introduced in Off-Axis Testing of Spherical Surfaces - Malacarautente489133Încă nu există evaluări
- 1995 - Novotny, Pohl, Hecht - Scanning Near-Field Optical Probe With Ultrasmall Spot Size - Optics LettersDocument4 pagini1995 - Novotny, Pohl, Hecht - Scanning Near-Field Optical Probe With Ultrasmall Spot Size - Optics LettersClaudio BiaginiÎncă nu există evaluări
- Quiz - Solution - Design A SingDocument9 paginiQuiz - Solution - Design A SingPaulÎncă nu există evaluări
- Gaussian Optics ExerciseDocument2 paginiGaussian Optics ExerciseManar MansourÎncă nu există evaluări
- NA of Optical Fibers - FO ApparatusDocument5 paginiNA of Optical Fibers - FO Apparatusmohammed saidÎncă nu există evaluări
- Low Cost AFM Piezo BusserDocument11 paginiLow Cost AFM Piezo Busserjast_80Încă nu există evaluări
- Portable Smartphone Optical Fibre SpectrometerDocument4 paginiPortable Smartphone Optical Fibre SpectrometerValentino TurotÎncă nu există evaluări
- Ambient Light DocumentDocument15 paginiAmbient Light DocumentSimone GhirardinÎncă nu există evaluări
- 1997.metzgar Et AlDocument9 pagini1997.metzgar Et AlAbheek BardhanÎncă nu există evaluări
- 2015 Opti 340Document3 pagini2015 Opti 340ramon_orozco_2Încă nu există evaluări
- Director Halogen Series-Cranes-Remote HeadsDocument16 paginiDirector Halogen Series-Cranes-Remote HeadsViktorasÎncă nu există evaluări
- Design of Square - Ring Microstrip AntennaDocument8 paginiDesign of Square - Ring Microstrip Antennasutariahardik_bvm66Încă nu există evaluări
- Optical Design: Laboratory ObjectiveDocument3 paginiOptical Design: Laboratory ObjectiveAriadna Uxue Palomino YllaÎncă nu există evaluări
- Fabry Perot InterferometerDocument6 paginiFabry Perot InterferometerPunu0% (1)
- Stocks GF H 2012Document9 paginiStocks GF H 2012Iulia Florina SimaÎncă nu există evaluări
- Carousel InterferometerDocument5 paginiCarousel InterferometeralayuÎncă nu există evaluări
- S4 - Imagers - Gaudin DelrieuDocument7 paginiS4 - Imagers - Gaudin Delrieuldg888dgÎncă nu există evaluări
- MM Fiber LabDocument10 paginiMM Fiber LabDanielOnelogÎncă nu există evaluări
- Cam Analysis MachineDocument14 paginiCam Analysis MachineAurangzebÎncă nu există evaluări
- Theo010 LibreOffc 1Document35 paginiTheo010 LibreOffc 1Nicolae-Iulian CristeaÎncă nu există evaluări
- fsq130 Ed ManualDocument36 paginifsq130 Ed Manualapi-302545246Încă nu există evaluări
- A High Resolution XUV Grating MonochromatorDocument11 paginiA High Resolution XUV Grating MonochromatorIndrajit KabirajÎncă nu există evaluări
- Vertical Diamond Turning - NambaDocument7 paginiVertical Diamond Turning - Nambakndprasad01Încă nu există evaluări
- E 112 2 Leading Line Design Programme v2 02Document4 paginiE 112 2 Leading Line Design Programme v2 02SEONGWOO BAEÎncă nu există evaluări
- Aspheric Glass Lens Modeling and Machining: A B A BDocument15 paginiAspheric Glass Lens Modeling and Machining: A B A BWÎncă nu există evaluări
- Datenblatt - APO Summicron SL 50 ASPH - enDocument2 paginiDatenblatt - APO Summicron SL 50 ASPH - entong chenÎncă nu există evaluări
- Antonov PDF - Oe-29-24-38958 091121Document13 paginiAntonov PDF - Oe-29-24-38958 091121Eugene AntonovÎncă nu există evaluări
- Optical Vortex Phase Plate Application NotesDocument5 paginiOptical Vortex Phase Plate Application NotesDu RoyÎncă nu există evaluări
- 1 s2.0 S0167931704001431 MainDocument8 pagini1 s2.0 S0167931704001431 MainSantiago SuarezÎncă nu există evaluări
- Auroral All-Sky Camera Calibration: Correspondence To: F. Sigernes (Freds@unis - No)Document5 paginiAuroral All-Sky Camera Calibration: Correspondence To: F. Sigernes (Freds@unis - No)Zikang XieÎncă nu există evaluări
- User Guide Small Linear OpticsDocument8 paginiUser Guide Small Linear OpticsKingsley GomesÎncă nu există evaluări
- Sem & TemDocument46 paginiSem & Temhrishikeshdeka18Încă nu există evaluări
- Solar Panel (530 - 550W)Document2 paginiSolar Panel (530 - 550W)nairsangeet9Încă nu există evaluări
- MAGIS 300-500-600 W Quartz Halogen Fresnel Spotlight: Mod. 300 Mod. 301Document6 paginiMAGIS 300-500-600 W Quartz Halogen Fresnel Spotlight: Mod. 300 Mod. 301createory blogÎncă nu există evaluări
- Subjective Questions: Wave OpticsDocument2 paginiSubjective Questions: Wave Opticsparava ppÎncă nu există evaluări
- FDTD Calculations of The Divergence Angle of Multi-Mode VCSELsDocument10 paginiFDTD Calculations of The Divergence Angle of Multi-Mode VCSELsJohn pengÎncă nu există evaluări
- EX-5540 Magnetic Fields Coils-1Document9 paginiEX-5540 Magnetic Fields Coils-1Miguel MolinaÎncă nu există evaluări
- OPTI 517 - HW1 - JillellaDocument11 paginiOPTI 517 - HW1 - JillellaPriyanka JillellaÎncă nu există evaluări
- Om SemDocument89 paginiOm SemRezki AshidiqiÎncă nu există evaluări
- Hello - IT's MeDocument1 paginăHello - IT's MeHelloÎncă nu există evaluări
- Formal DocumentDocument1 paginăFormal DocumentHelloÎncă nu există evaluări
- Formal Document 2Document1 paginăFormal Document 2HelloÎncă nu există evaluări
- Formal DocumentDocument1 paginăFormal DocumentHelloÎncă nu există evaluări
- Hodor PDFDocument1 paginăHodor PDFHelloÎncă nu există evaluări
- Hodor PDFDocument1 paginăHodor PDFHelloÎncă nu există evaluări
- CR Refrigerators Freezers Manual 5525Document16 paginiCR Refrigerators Freezers Manual 5525HelloÎncă nu există evaluări
- Reef Guide PDFDocument70 paginiReef Guide PDFHelloÎncă nu există evaluări
- Social Media Use by Older AdultsDocument8 paginiSocial Media Use by Older AdultsHelloÎncă nu există evaluări
- Crack LaserDocument51 paginiCrack LaserHelloÎncă nu există evaluări
- Sales Flyer 13 BDocument32 paginiSales Flyer 13 BHelloÎncă nu există evaluări
- Learncbse - In-Light Reflection and Refraction Chapter Wise Important Questions Class 10 ScienceDocument37 paginiLearncbse - In-Light Reflection and Refraction Chapter Wise Important Questions Class 10 SciencetummalaajaybabuÎncă nu există evaluări
- Virtual vs. Real ImagesDocument3 paginiVirtual vs. Real ImagesRodilyn ManaguiconÎncă nu există evaluări
- Quiz 8ADocument4 paginiQuiz 8Aks.ashwiniÎncă nu există evaluări
- Philosophy of Nature (With Explanatory Notes - Volume II)Document467 paginiPhilosophy of Nature (With Explanatory Notes - Volume II)L H RamosÎncă nu există evaluări
- Light SolutionsDocument105 paginiLight SolutionsShreyas Salunkhe X AÎncă nu există evaluări
- COLORDocument12 paginiCOLORAnushka KhatriÎncă nu există evaluări
- KPE CapabilitiesDocument1 paginăKPE CapabilitiesKislev1Încă nu există evaluări
- LightReflection & Refractions Previous Year Questiosn Class 10 ScienceDocument9 paginiLightReflection & Refractions Previous Year Questiosn Class 10 ScienceZhugzhuang ZuryÎncă nu există evaluări
- Manual 1Document48 paginiManual 1CCarrionVÎncă nu există evaluări
- Methods of SilveringDocument21 paginiMethods of SilveringAnanthanarayananÎncă nu există evaluări
- Komatsu D65 Bulldozer Operation Maintenance ManualDocument221 paginiKomatsu D65 Bulldozer Operation Maintenance ManualLuis Guaman100% (1)
- Solar Thermal Energy - EnglishDocument10 paginiSolar Thermal Energy - EnglishDAVID IKENNAÎncă nu există evaluări
- Reflectance in Thin Films - All 13.10 DatDocument19 paginiReflectance in Thin Films - All 13.10 DatAnaÎncă nu există evaluări
- B GENERAL PHYSICS II Q4M4 Learner Copy Final LayoutDocument37 paginiB GENERAL PHYSICS II Q4M4 Learner Copy Final LayoutJimros CabigÎncă nu există evaluări
- MCQs For Class 10 PhysicsDocument21 paginiMCQs For Class 10 PhysicsKRISH VIMALÎncă nu există evaluări
- Wave Optics MCQDocument8 paginiWave Optics MCQGuru ki physicsÎncă nu există evaluări
- Physical Science 5-8Document17 paginiPhysical Science 5-8Dainavi Lizarte Bayucan PalitayanÎncă nu există evaluări
- Science Assessments 2Document9 paginiScience Assessments 2Chaira RenegadoÎncă nu există evaluări
- Glass - Unit V Aesthetics of Glass ArchitectiureDocument16 paginiGlass - Unit V Aesthetics of Glass ArchitectiureASWIN KUMAR N SÎncă nu există evaluări
- Pilkington Mirropane Datasheet PDFDocument2 paginiPilkington Mirropane Datasheet PDFfatamorgganaÎncă nu există evaluări
- Solar Radiation GeometryDocument62 paginiSolar Radiation GeometrySai ReddyÎncă nu există evaluări
- Reflective Materials ReportDocument21 paginiReflective Materials Reportdwimukh360Încă nu există evaluări
- A A T S R: Divisi Adiwira PlastikDocument16 paginiA A T S R: Divisi Adiwira PlastikGayuhÎncă nu există evaluări
- Nematology: Plant NotesDocument304 paginiNematology: Plant NotesLokesh AhirwarÎncă nu există evaluări
- University of Cambridge International Examinations International General Certificate of Secondary EducationDocument12 paginiUniversity of Cambridge International Examinations International General Certificate of Secondary EducationHaider AliÎncă nu există evaluări
- General Wave Properties 3 MSDocument3 paginiGeneral Wave Properties 3 MSAli SiddiqÎncă nu există evaluări
- KR-Q, SR-Q: Industry's Standard of Transparent Object Detection SensorDocument14 paginiKR-Q, SR-Q: Industry's Standard of Transparent Object Detection Sensorpaco elibrando rojas narvaezÎncă nu există evaluări
- VIII To IX Entrance Test Sample Paper-1Document17 paginiVIII To IX Entrance Test Sample Paper-1Yogita MehrotraÎncă nu există evaluări
- !7-ОШ - ФО - Англ.яз - 3кл - 130318Document135 pagini!7-ОШ - ФО - Англ.яз - 3кл - 130318Aktoty RyskulÎncă nu există evaluări
- Tuttobene Catalogue Milan2013 PDFDocument25 paginiTuttobene Catalogue Milan2013 PDFklaaasÎncă nu există evaluări