S-ar putea să vă placă și
- Redressement Non CommandeDocument4 paginiRedressement Non Commandeفدوى غاني100% (3)
- Onduleurs Et Variation de Vitesse PSIMDocument9 paginiOnduleurs Et Variation de Vitesse PSIMdarknight100% (1)
- TP1-redressement-monophase Commande Simulation SimulinkDocument4 paginiTP1-redressement-monophase Commande Simulation Simulinkomar ballalouÎncă nu există evaluări
- TP Puissance 4Document10 paginiTP Puissance 4Samah Boughanem83% (6)
- TD Sciences Appliquees Machines Synchron PDFDocument36 paginiTD Sciences Appliquees Machines Synchron PDFAbdellahEL100% (1)
- Toaz - Info Compte Rendu TP Gradateur Monophase PRDocument13 paginiToaz - Info Compte Rendu TP Gradateur Monophase PRmajda bensalemÎncă nu există evaluări
- Série Dexercice - Chapitre 3Document4 paginiSérie Dexercice - Chapitre 3kima lachgar100% (1)
- Enoncés: TD #4: Les Machines A Courant Continu A Excitation ShuntDocument3 paginiEnoncés: TD #4: Les Machines A Courant Continu A Excitation ShuntNabil Mekimah100% (2)
- Introduction Au Redressement Monophase Non CommandeDocument10 paginiIntroduction Au Redressement Monophase Non CommandeSousou SaidiÎncă nu există evaluări
- Corrigé Exercices Hacheur ParallèleDocument2 paginiCorrigé Exercices Hacheur ParallèleMohamed Berrached100% (3)
- Cours 2 - Redresseurs TRIDocument18 paginiCours 2 - Redresseurs TRIOUMAYMA CHMARKHÎncă nu există evaluări
- TD Hacheur1Document14 paginiTD Hacheur1imad Djeddou100% (1)
- Cours Redressement Non CommandéDocument8 paginiCours Redressement Non CommandéOualid Zaouich67% (6)
- 11 Exercices Corrigés Sur Convertisseurs Statiques 2 Bac Science DingenieurDocument6 pagini11 Exercices Corrigés Sur Convertisseurs Statiques 2 Bac Science DingenieurHyacinthe Kossi67% (3)
- TP 2 EP Hacheur SérieDocument12 paginiTP 2 EP Hacheur Sérieharzallah khaled100% (1)
- Redresseurs Triphasés CommandésDocument8 paginiRedresseurs Triphasés Commandéskima lachgarÎncă nu există evaluări
- TP N4 - Gradateurs MonophasesDocument3 paginiTP N4 - Gradateurs Monophasesayat100% (2)
- Exercices Sur Moteurs À Courant ContinuDocument2 paginiExercices Sur Moteurs À Courant ContinuAyoub El Badri100% (3)
- TD MSDocument4 paginiTD MSFakhreddine OkailÎncă nu există evaluări
- TP2 La Régulation TachymétriqueDocument8 paginiTP2 La Régulation TachymétriqueBounegab Youcef75% (4)
- TD4 As Eei S4 2020Document1 paginăTD4 As Eei S4 2020ELMEHDI CHOUINE100% (1)
- Chapitre 16 Redressement Non CommandéDocument13 paginiChapitre 16 Redressement Non CommandéLokmane Abada100% (5)
- TD MCCDocument8 paginiTD MCCAli BOUKHRISS100% (1)
- Td+correction EnpuDocument27 paginiTd+correction EnpuChristian100% (1)
- TP ReseauDocument7 paginiTP ReseauFranchesca MumbiÎncă nu există evaluări
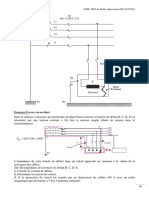
- Question 1Document10 paginiQuestion 1Dann FiestaÎncă nu există evaluări
- Modélisation Et Simulation Du Moteur À Courant ContinuDocument5 paginiModélisation Et Simulation Du Moteur À Courant Continuعثمان عثمان100% (1)
- TP2 Redressement Monophase CommandeDocument8 paginiTP2 Redressement Monophase Commandepopamino80% (5)
- TP5 Hacheur Serie Moteur Courant ContinuDocument9 paginiTP5 Hacheur Serie Moteur Courant ContinuNoureddine Ould Cherchali0% (1)
- Redressement Monophase Simple Alternance A DiodeDocument4 paginiRedressement Monophase Simple Alternance A Diodearech43Încă nu există evaluări
- Ex STS2 12 Machines AsynchronesDocument71 paginiEx STS2 12 Machines Asynchronesreda100% (2)
- TP AutomatismeDocument8 paginiTP AutomatismeTOP Série HD100% (5)
- TD SecuritéDocument7 paginiTD SecuritéAicha B'mh100% (4)
- TP1 - Redresseur P1 Commandé Et Non CommandéDocument5 paginiTP1 - Redresseur P1 Commandé Et Non Commandéamina sayah0% (1)
- Fiche de TD N 7Document4 paginiFiche de TD N 7Saad TaibiÎncă nu există evaluări
- TD Redresseurs Corrigé PDFDocument8 paginiTD Redresseurs Corrigé PDFhassna ait aliÎncă nu există evaluări
- Cours OnduleurDocument4 paginiCours OnduleurAymen Chaaira50% (2)
- TP #1 Redressement Monophasé Non CommandéDocument10 paginiTP #1 Redressement Monophasé Non CommandéLo LoÎncă nu există evaluări
- Cours ELM-redressementDocument38 paginiCours ELM-redressementimane amona100% (1)
- TD MCCDocument8 paginiTD MCCMounaim MatiniÎncă nu există evaluări
- TP1 Redressement Monophase Non Commande PDFDocument7 paginiTP1 Redressement Monophase Non Commande PDFPatrick Benie63% (8)
- TD N°1 Avec Cor Alim À Dec Direct 2020Document18 paginiTD N°1 Avec Cor Alim À Dec Direct 2020Ala Massoudi100% (3)
- Travaux Diriges Ei l2 s1 2015Document29 paginiTravaux Diriges Ei l2 s1 2015YesmaRofia100% (2)
- Electrotechnique Fond1 - NebtiDocument32 paginiElectrotechnique Fond1 - NebtiTtabi VeydiÎncă nu există evaluări
- Cours Electr Partie4Document33 paginiCours Electr Partie4Mohamed AkramÎncă nu există evaluări
- Les Circuits en Regime SinusoidalDocument35 paginiLes Circuits en Regime Sinusoidalselotmani100% (1)
- HacheurDocument13 paginiHacheurLTIMKÎncă nu există evaluări
- Cours Hacheurs PDFDocument9 paginiCours Hacheurs PDFFarid AfifiÎncă nu există evaluări
- TD Chap 2Document16 paginiTD Chap 2Mouad KabouriÎncă nu există evaluări
- Note de CourDocument14 paginiNote de CourAbdelfettah OranÎncă nu există evaluări
- BoostDocument8 paginiBoostمحمد الشيخاويÎncă nu există evaluări
- 1) Chapitre 2 Courant Alternatifs MonophaséDocument12 pagini1) Chapitre 2 Courant Alternatifs Monophaséelina elinaÎncă nu există evaluări
- Exercice 1: Examen D'electronique de Puissance - 3ADocument2 paginiExercice 1: Examen D'electronique de Puissance - 3ALotfi AbidiÎncă nu există evaluări
- Thevenin and NortonDocument6 paginiThevenin and NortonSoumia Lioness OrihimieÎncă nu există evaluări
- Chapitre 1Document16 paginiChapitre 1belalzaki407Încă nu există evaluări
- Chapitre Systéme TriphaséDocument18 paginiChapitre Systéme TriphaséMokhtar BesseghierÎncă nu există evaluări
- TD Hacheur OnduleuriDocument11 paginiTD Hacheur Onduleuriimad el-ghayoury100% (1)
- Chap II Red Mono NCDocument13 paginiChap II Red Mono NCHadi HamzehÎncă nu există evaluări
- Modification PédaleDocument173 paginiModification PédaleAnonymous qLJd1kf4Încă nu există evaluări
- Transformer Ces Phrases Pour Exprimer La Simultanéité Avec Le GérondifDocument2 paginiTransformer Ces Phrases Pour Exprimer La Simultanéité Avec Le GérondifNguyễn Linh ChiÎncă nu există evaluări
- Lettre de Candidature - FRANCAISDocument9 paginiLettre de Candidature - FRANCAISNistor100% (2)
- ERL-2000 Manuel Utilisateur FrançaisDocument35 paginiERL-2000 Manuel Utilisateur FrançaisMehdi 1998Încă nu există evaluări
- Fiche Viii 3Document7 paginiFiche Viii 3fethi42Încă nu există evaluări
- Burj KhalifaDocument2 paginiBurj KhalifaZina SirbuÎncă nu există evaluări
- Sentron Cataloque 2106 2017 FR InternetDocument104 paginiSentron Cataloque 2106 2017 FR InternetbakhoucheÎncă nu există evaluări
- Les 4 Types de Construction Bois - Chalet de Bois Rond - Chalet de Type Scandinave - Ossature Bois - Poteau Poutre - Chalet en Rondin de BoisDocument4 paginiLes 4 Types de Construction Bois - Chalet de Bois Rond - Chalet de Type Scandinave - Ossature Bois - Poteau Poutre - Chalet en Rondin de BoisfzÎncă nu există evaluări
- Manuel Gestion Des ImmobilisationsDocument6 paginiManuel Gestion Des ImmobilisationsAbderrahim TMIQ0% (1)
- SCRIPT Du Présentation PFEDocument4 paginiSCRIPT Du Présentation PFEOussama Ob67% (3)
- CH 15 Ressaut PDFDocument16 paginiCH 15 Ressaut PDFAnonymous M0tjyWÎncă nu există evaluări
- Technqiues InjectionDocument34 paginiTechnqiues InjectionMongi Ben Ouezdou100% (1)
- Guide Utilisation EtendueDocument83 paginiGuide Utilisation EtendueStaifa SimoÎncă nu există evaluări
- Exercice Fle LFDMDocument2 paginiExercice Fle LFDMSilvia PerezÎncă nu există evaluări
- Guide Entre Tien Renault Nve 72Document34 paginiGuide Entre Tien Renault Nve 72Francis GuilbaultÎncă nu există evaluări
- Pompe Centrifuge PDFDocument49 paginiPompe Centrifuge PDFSofian Salmani95% (20)
- Dictionnaire LogistiqueDocument64 paginiDictionnaire Logistiquedarren112Încă nu există evaluări
- M288M - M451M Moteur 250CC 4 Temps 4 Soupapes Piaggio PDFDocument48 paginiM288M - M451M Moteur 250CC 4 Temps 4 Soupapes Piaggio PDFmathieu ribeiroÎncă nu există evaluări
- La Planification StratégiqueDocument47 paginiLa Planification StratégiqueAhmed Ouazene100% (3)
- Dalles Nervurées FR 16Document1 paginăDalles Nervurées FR 16YzuejÎncă nu există evaluări
- Chapitre (II) Adaptation DimpédanceDocument9 paginiChapitre (II) Adaptation DimpédanceMegherbi RahalÎncă nu există evaluări
- LP Web TP1 IDSE PDFDocument35 paginiLP Web TP1 IDSE PDFHafid SalimÎncă nu există evaluări
- Cremmaet-Compact User Manual EsDocument136 paginiCremmaet-Compact User Manual EsPepe Llinares FelipÎncă nu există evaluări
- Cours Electronique NumeriqueDocument76 paginiCours Electronique NumeriqueFarid MakhloufiÎncă nu există evaluări
- AeroSpot Catalogue Juin2017Document46 paginiAeroSpot Catalogue Juin2017mathieuÎncă nu există evaluări
- Composition GTDocument2 paginiComposition GTNØm PrïvéÎncă nu există evaluări
- Installation Manual Corsun 2 2 PDFDocument84 paginiInstallation Manual Corsun 2 2 PDFMohammad ZeeshanÎncă nu există evaluări
- Pour Bioxymop 6346: Armoire de CommandeDocument2 paginiPour Bioxymop 6346: Armoire de Commandeunivers servicesÎncă nu există evaluări
- Tu Falta de Querer ScoreDocument17 paginiTu Falta de Querer ScoreSandra ZuaresÎncă nu există evaluări
- 1874a Degazeur Thermique - Serv'Eau - P.PDocument4 pagini1874a Degazeur Thermique - Serv'Eau - P.PZornitza UrumovaÎncă nu există evaluări