S-ar putea să vă placă și
- Guia CirosDocument91 paginiGuia CirosHéctor PeñaÎncă nu există evaluări
- Anatomia de Un RobotDocument48 paginiAnatomia de Un RobotDavid GarciaÎncă nu există evaluări
- Tutorial Pepakura ViewerDocument11 paginiTutorial Pepakura ViewerabdelnapagarciaÎncă nu există evaluări
- Monografia Milton Hilara FINALDocument45 paginiMonografia Milton Hilara FINALMike WasouskiÎncă nu există evaluări
- Brazo Robotico Controlado Por Un JoystickDocument7 paginiBrazo Robotico Controlado Por Un JoystickJhonathan AsadovayÎncă nu există evaluări
- Instrucciones de Movimiento de Datos y ComparaciónDocument9 paginiInstrucciones de Movimiento de Datos y ComparaciónJorge Aguirre0% (1)
- Circuitos InfrarrojosDocument10 paginiCircuitos InfrarrojosrickiaqpÎncă nu există evaluări
- Software CosimirDocument8 paginiSoftware CosimirCarlos PavaÎncă nu există evaluări
- Memoria Proyecto Control Cisterna y Tanque Con ZelioDocument6 paginiMemoria Proyecto Control Cisterna y Tanque Con ZelioErnesto Tolocka100% (3)
- Sistemas de MonitoreoDocument40 paginiSistemas de MonitoreoJacky V. HerbasÎncă nu există evaluări
- Monografia Brazo Robotico 1Document106 paginiMonografia Brazo Robotico 1anon_678365461Încă nu există evaluări
- Generaciones de La RobóticaDocument3 paginiGeneraciones de La RobóticaMicroFrameworkÎncă nu există evaluări
- Integracion de Labview Con MatlabDocument9 paginiIntegracion de Labview Con MatlabBrunoÎncă nu există evaluări
- Proyecto de Robot Carrito Seguidor de Luz PROYECTO FINALDocument17 paginiProyecto de Robot Carrito Seguidor de Luz PROYECTO FINALHitler Ivan Chacon Quispe0% (1)
- Practica 2 Control DepositoDocument4 paginiPractica 2 Control Depositomarc menesesÎncă nu există evaluări
- Informe N°1 RoboticaDocument15 paginiInforme N°1 RoboticaEduardo QuistanÎncă nu există evaluări
- Generaciones de La RoboticaDocument5 paginiGeneraciones de La RoboticaflorÎncă nu există evaluări
- Multimetro LabviewDocument17 paginiMultimetro LabviewHertz77Încă nu există evaluări
- PLC Pid PCDocument5 paginiPLC Pid PCArnol MurilloÎncă nu există evaluări
- Configuración Profibus PLC-variadorDocument15 paginiConfiguración Profibus PLC-variadorJohny AlvarezÎncă nu există evaluări
- 3.2 Lenguaje de Programación Estandar para PLCDocument11 pagini3.2 Lenguaje de Programación Estandar para PLCSusana MendozaÎncă nu există evaluări
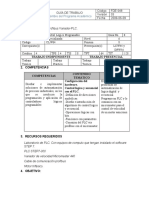
- Examen 5 Competencia 1 Automatización de Procesos Con PLC y HMIDocument4 paginiExamen 5 Competencia 1 Automatización de Procesos Con PLC y HMICarlos BarrosoÎncă nu există evaluări
- Servomotores TRABAJODocument7 paginiServomotores TRABAJOBeatriz de la CruzÎncă nu există evaluări
- Como Conectar Bluetooth HC-05, Arduino y Diadema MindWave NeuroSky - The Inventor's HouseDocument14 paginiComo Conectar Bluetooth HC-05, Arduino y Diadema MindWave NeuroSky - The Inventor's HouseJhonatan Larico100% (1)
- Robótics ProgrammingDocument9 paginiRobótics ProgrammingGuillermo MoranÎncă nu există evaluări
- Dispositivos de Entrada y Salida y Sus ControladoresDocument9 paginiDispositivos de Entrada y Salida y Sus ControladoresBrenda Rol0% (2)
- Módulo de Comunicación GSMDocument10 paginiMódulo de Comunicación GSMCarlosE.Jerez100% (1)
- 03-RS-Logix - InstruccionesDocument27 pagini03-RS-Logix - InstruccionesEmanuel AguirreÎncă nu există evaluări
- Efectores y PrecisionDocument29 paginiEfectores y PrecisionEli D'KidÎncă nu există evaluări
- Informe Proyecto FinalDocument27 paginiInforme Proyecto FinalAnbech AnselmoÎncă nu există evaluări
- Laboratorio 3 Elt3890-2-2020Document11 paginiLaboratorio 3 Elt3890-2-2020Joel CahuanaÎncă nu există evaluări
- Actividad Entregable de Robotica IndustrialDocument10 paginiActividad Entregable de Robotica Industrialhander santamariaÎncă nu există evaluări
- Letrero ElectronicoDocument26 paginiLetrero ElectronicoJeff Torres CaroÎncă nu există evaluări
- Temporizadores LogoDocument7 paginiTemporizadores LogoFabianChangoÎncă nu există evaluări
- Articulo NoderedDocument3 paginiArticulo NoderedBryan CastroÎncă nu există evaluări
- Reglamento SumoDocument7 paginiReglamento SumoLuz 1Încă nu există evaluări
- Laboratorio #5 Transistor IgbtDocument4 paginiLaboratorio #5 Transistor IgbtNestor QuispeÎncă nu există evaluări
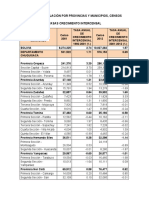
- Bolivia: Población Por Provincias Y Municipios, Censos 2001 Y 2012, Tasas Crecimiento IntercensalDocument12 paginiBolivia: Población Por Provincias Y Municipios, Censos 2001 Y 2012, Tasas Crecimiento IntercensalarielÎncă nu există evaluări
- Control de Paridad BidimensionalDocument4 paginiControl de Paridad BidimensionalCristhian DavidÎncă nu există evaluări
- Temporizadores On-Delay y Off-DelayDocument7 paginiTemporizadores On-Delay y Off-DelayAngel López100% (1)
- Métodos de Diseños de Circuitos Combinacionales y Secuenciales para PLCDocument209 paginiMétodos de Diseños de Circuitos Combinacionales y Secuenciales para PLCJORGE YAHÎncă nu există evaluări
- Simulación RobotStudioDocument10 paginiSimulación RobotStudioSteven Monárrez0% (1)
- Informe MotomanDocument18 paginiInforme MotomanLuis MiguelÎncă nu există evaluări
- D Robots Resuelve Laberintos PDFDocument4 paginiD Robots Resuelve Laberintos PDFAlfonso ArroyoÎncă nu există evaluări
- Generación de TrayectoriasDocument18 paginiGeneración de TrayectoriasErick CastilloÎncă nu există evaluări
- Informe Robot LaberintoDocument3 paginiInforme Robot Laberintopogo pogoÎncă nu există evaluări
- Informe Auto LavadoDocument10 paginiInforme Auto LavadoFLAVIOÎncă nu există evaluări
- Laboratorio 1 PLCDocument12 paginiLaboratorio 1 PLCDARIELÎncă nu există evaluări
- Guia 01 IndexadoDocument28 paginiGuia 01 Indexadojulfo05Încă nu există evaluări
- Informe de Acceso RemotoDocument5 paginiInforme de Acceso RemotoGilberto Da SilvaÎncă nu există evaluări
- Dinamicaderobots Sierrasierranelsonariel Kuka Kr6!2!130924231741 Phpapp01Document42 paginiDinamicaderobots Sierrasierranelsonariel Kuka Kr6!2!130924231741 Phpapp01Luciana Gutierrez SalazarÎncă nu există evaluări
- MANUAL ROBOT MotomanDocument5 paginiMANUAL ROBOT Motomanrulomagana0% (1)
- Preguntas KUKADocument6 paginiPreguntas KUKAsantyÎncă nu există evaluări
- Anatomia de Los RobotsDocument67 paginiAnatomia de Los RobotsFernando MorenoÎncă nu există evaluări
- FST 4 Conexion TCP-IPDocument18 paginiFST 4 Conexion TCP-IPAntonio OviedoÎncă nu există evaluări
- Diseño de Un Brazo Robotico Industrial para Sistemas Automatizados1Document19 paginiDiseño de Un Brazo Robotico Industrial para Sistemas Automatizados1danielÎncă nu există evaluări
- Paper RV-M1Document5 paginiPaper RV-M1dickforusÎncă nu există evaluări
- Trabajo Robotstudio - MemoriaDocument17 paginiTrabajo Robotstudio - MemoriaJavier LapuenteÎncă nu există evaluări
- Laboratorio 1Document9 paginiLaboratorio 1Andree CrÎncă nu există evaluări
- Control de movimiento en manufactura. Automatización CNC fundamentos de diseño y modelamiento experimentalDe la EverandControl de movimiento en manufactura. Automatización CNC fundamentos de diseño y modelamiento experimentalEvaluare: 5 din 5 stele5/5 (4)
- Plano de PoleaDocument1 paginăPlano de PoleaCarlos Quispealaya LazoÎncă nu există evaluări
- PA2-Quispealaya Lazo Guersom Carlos PDFDocument2 paginiPA2-Quispealaya Lazo Guersom Carlos PDFCarlos Quispealaya LazoÎncă nu există evaluări
- PA2 - Emprendimiento e InnovacionDocument2 paginiPA2 - Emprendimiento e InnovacionCarlos Quispealaya LazoÎncă nu există evaluări
- Emprendimiento e Innovación - P2 2019-00Document2 paginiEmprendimiento e Innovación - P2 2019-00Carlos Quispealaya LazoÎncă nu există evaluări
- Inventarios - ToysPlus, Inc.Document4 paginiInventarios - ToysPlus, Inc.Yessenia VTÎncă nu există evaluări
- Cotización Robot Kuka KR10 R1100 - Versión Final Mayo 2022.Document14 paginiCotización Robot Kuka KR10 R1100 - Versión Final Mayo 2022.Dennis Barrios AranibarÎncă nu există evaluări
- Apoyo 7°Document4 paginiApoyo 7°Melisa MenaÎncă nu există evaluări
- PROYECTODocument5 paginiPROYECTOricardo quesadaÎncă nu există evaluări
- Robots KUKA para Cargas Elevadas PDFDocument36 paginiRobots KUKA para Cargas Elevadas PDFcristian garcia100% (1)
- Análisis Película Robots PDFDocument6 paginiAnálisis Película Robots PDFJaviera LoyolaÎncă nu există evaluări
- 2do. Robot MasaDocument2 pagini2do. Robot Masanoea77aque4592Încă nu există evaluări
- Libro Fundamentos de Manufactura Moderna 900-963Document68 paginiLibro Fundamentos de Manufactura Moderna 900-963samir0504Încă nu există evaluări
- Robotizacion en Las EmpresasDocument4 paginiRobotizacion en Las EmpresasHerrera Lara AreliÎncă nu există evaluări
- Modelo Medico Hegemonico Tendencia Posibles Menendez PDFDocument25 paginiModelo Medico Hegemonico Tendencia Posibles Menendez PDFWalter RiosÎncă nu există evaluări
- Nccu Nccu-234 FormatoalumnotrabajofinalDocument10 paginiNccu Nccu-234 FormatoalumnotrabajofinalValeria MontoyaÎncă nu există evaluări
- Ensayo INTELIGENCIA ARTIFICIALDocument3 paginiEnsayo INTELIGENCIA ARTIFICIALAurora RamirezÎncă nu există evaluări
- Sepro Util Máquina InyecciónDocument69 paginiSepro Util Máquina InyecciónAarón Díaz100% (4)
- (2013) (Guzmán) Modelado y Simulación de Un Robot Terapéutico para La Rehabilitación de Miembros InferioresDocument28 pagini(2013) (Guzmán) Modelado y Simulación de Un Robot Terapéutico para La Rehabilitación de Miembros InferioreserikÎncă nu există evaluări
- Exposicion EticaDocument7 paginiExposicion Eticaangie BenitesÎncă nu există evaluări
- 92.06 Automatización Industrial y RobóticaDocument7 pagini92.06 Automatización Industrial y Robóticaanon_242354499Încă nu există evaluări
- Monografía Edición 1Document39 paginiMonografía Edición 1FLOREZ RODRIGUEZ SALVADORÎncă nu există evaluări
- Project Charter v1 Ultimo v3Document6 paginiProject Charter v1 Ultimo v3Rolando Merino VélezÎncă nu există evaluări
- Inteligencia ArtificialDocument6 paginiInteligencia ArtificialLiz Angelica PuertoÎncă nu există evaluări
- "Yo Robot" 7 ¡ La Fuga!: Introduccion.Document24 pagini"Yo Robot" 7 ¡ La Fuga!: Introduccion.ERIKA GUARACHI KARAÎncă nu există evaluări
- (2.1) Tecnologías Avanzadas de ProducciónDocument23 pagini(2.1) Tecnologías Avanzadas de ProducciónAnonymous Ifwn5SrKGÎncă nu există evaluări
- Desarrollo de Robot Submarino para Exploración en Aguas SomerasDocument3 paginiDesarrollo de Robot Submarino para Exploración en Aguas SomerasJohn Alexander HidalgoÎncă nu există evaluări
- ''Paráfrasis''Document12 pagini''Paráfrasis''Damian AlejandroÎncă nu există evaluări
- Informe Lab5 - ControlDocument6 paginiInforme Lab5 - Controldanielw123Încă nu există evaluări
- 100586-ES-A DS01 HW ER4u PDFDocument2 pagini100586-ES-A DS01 HW ER4u PDFFernanda MartínezÎncă nu există evaluări
- Análisis CríticoDocument2 paginiAnálisis CríticoJesus CortezanoÎncă nu există evaluări
- Fanuc ManualDocument20 paginiFanuc ManualnobamoÎncă nu există evaluări
- Punto 4 UnadDocument10 paginiPunto 4 UnadGERMINÎncă nu există evaluări
- Efector Final RoboticaDocument28 paginiEfector Final RoboticaAnthony Cardenas CastilloÎncă nu există evaluări
- Taller de RobóticaDocument14 paginiTaller de Robóticaluis_subiabreÎncă nu există evaluări