S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- A16b 1310 0010 01 Power Unit Fanuc Manual PDFDocument635 paginiA16b 1310 0010 01 Power Unit Fanuc Manual PDFNisar AhmedÎncă nu există evaluări
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Defects in Stainless SteelDocument31 paginiDefects in Stainless SteelPrabhakar Kattula80% (5)
- Mechanics of Structure IIDocument3 paginiMechanics of Structure IIvenkata369Încă nu există evaluări
- Ug-26 Skad-Kad 04Document1 paginăUg-26 Skad-Kad 04Nisar AhmedÎncă nu există evaluări
- O359h MilDocument90 paginiO359h MilNisar AhmedÎncă nu există evaluări
- GK-XX IngDocument1 paginăGK-XX IngNisar AhmedÎncă nu există evaluări
- Em-Xx IngDocument1 paginăEm-Xx IngNisar AhmedÎncă nu există evaluări
- Em-Xx IngDocument1 paginăEm-Xx IngNisar AhmedÎncă nu există evaluări
- RS-422 Splitter PDFDocument1 paginăRS-422 Splitter PDFNisar AhmedÎncă nu există evaluări
- HV350 CatalogDocument5 paginiHV350 CatalogNisar AhmedÎncă nu există evaluări
- Rs-422 Splitter Circuit DiagramDocument1 paginăRs-422 Splitter Circuit DiagramNisar AhmedÎncă nu există evaluări
- Ug-26 Skad-Kad 04Document1 paginăUg-26 Skad-Kad 04Nisar AhmedÎncă nu există evaluări
- GK-XX IngDocument1 paginăGK-XX IngNisar AhmedÎncă nu există evaluări
- Standard Heavy Duty Limit Switches FD/FP/FL: Options and Ordering CodesDocument9 paginiStandard Heavy Duty Limit Switches FD/FP/FL: Options and Ordering CodesNisar AhmedÎncă nu există evaluări
- Dav-Xxx IngDocument1 paginăDav-Xxx IngNisar AhmedÎncă nu există evaluări
- Irt WP12 230 PDFDocument2 paginiIrt WP12 230 PDFNisar AhmedÎncă nu există evaluări
- 3 Axis TB6560 3.5A Stepper Motor Driver Board Manual PDFDocument10 pagini3 Axis TB6560 3.5A Stepper Motor Driver Board Manual PDFNisar AhmedÎncă nu există evaluări
- RS-422 and RS-485 Application Note: International HeadquartersDocument22 paginiRS-422 and RS-485 Application Note: International HeadquartersNisar AhmedÎncă nu există evaluări
- 2 - Cables and TablesDocument51 pagini2 - Cables and Tablesnewton20100% (5)
- P2796RLW IP55 Rugged ServerDocument3 paginiP2796RLW IP55 Rugged ServerNisar AhmedÎncă nu există evaluări
- Model 9200-2123: 1 RS-422 Input/3 RS-422 Output ModuleDocument2 paginiModel 9200-2123: 1 RS-422 Input/3 RS-422 Output ModuleNisar AhmedÎncă nu există evaluări
- DS8922 NationalSemiconductor Elenota - PLDocument14 paginiDS8922 NationalSemiconductor Elenota - PLNisar AhmedÎncă nu există evaluări
- Table of Contents (1) : TitleDocument42 paginiTable of Contents (1) : TitleNisar AhmedÎncă nu există evaluări
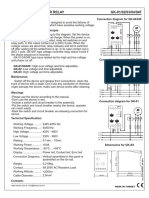
- Voltage and Phase RelayDocument1 paginăVoltage and Phase RelayNisar AhmedÎncă nu există evaluări
- Temperature and Humidity SensorDocument1 paginăTemperature and Humidity SensorNisar AhmedÎncă nu există evaluări
- Back-to-Back Accelerometer CalibrationDocument3 paginiBack-to-Back Accelerometer CalibrationAekDzLaiÎncă nu există evaluări
- CA Abb V-ContactDocument92 paginiCA Abb V-ContactWiliam CopacatiÎncă nu există evaluări
- False: True True True TrueDocument2 paginiFalse: True True True TrueSuubi brianÎncă nu există evaluări
- CTX 310 Communication With Fast Ethernet Board V2 (Fanuc)Document34 paginiCTX 310 Communication With Fast Ethernet Board V2 (Fanuc)iveÎncă nu există evaluări
- HNBR Material TestDocument16 paginiHNBR Material TestskyerfreeÎncă nu există evaluări
- Cell Biology: Science Explorer - Cells and HeredityDocument242 paginiCell Biology: Science Explorer - Cells and HeredityZeinab ElkholyÎncă nu există evaluări
- SampleDocument43 paginiSampleSri E.Maheswar Reddy Assistant ProfessorÎncă nu există evaluări
- Appendix 1 - Using Avaya Site Administration (ASA)Document11 paginiAppendix 1 - Using Avaya Site Administration (ASA)raghavÎncă nu există evaluări
- Klüberpaste HS 91-21 EN enDocument4 paginiKlüberpaste HS 91-21 EN entroy2k0Încă nu există evaluări
- Quantum Computing: Exercise Sheet 1: Steven Herbert and Anuj DawarDocument2 paginiQuantum Computing: Exercise Sheet 1: Steven Herbert and Anuj DawarJuan DiegoÎncă nu există evaluări
- DeskView Client 6 45 enDocument166 paginiDeskView Client 6 45 enRazvan22081997Încă nu există evaluări
- 1B MotionDocument20 pagini1B MotionghalyaÎncă nu există evaluări
- Ferrofluids (Introduction, Future Horizons and Applications)Document21 paginiFerrofluids (Introduction, Future Horizons and Applications)Makhdoom Luqman HashmiÎncă nu există evaluări
- 6-OpProfiles PrintableDocument32 pagini6-OpProfiles PrintableGon_1313Încă nu există evaluări
- JP MS Ramaiah Edhitha 2015Document21 paginiJP MS Ramaiah Edhitha 2015UtkarshÎncă nu există evaluări
- Regcm 4.3 Training Session Ii Regcm4.3-Rc OutputDocument8 paginiRegcm 4.3 Training Session Ii Regcm4.3-Rc OutputShane Marie VisagaÎncă nu există evaluări
- CS405PC JP Unit-3Document44 paginiCS405PC JP Unit-3MEGHANA 3Încă nu există evaluări
- Experiment 08-A2dDocument3 paginiExperiment 08-A2dapi-277396867Încă nu există evaluări
- 1575 Tania SultanaDocument10 pagini1575 Tania SultanaTania SultanaÎncă nu există evaluări
- Carbon Compounds: Standard/ Class/ Grade - 10 SSC, CBSE - 8 ICSEDocument53 paginiCarbon Compounds: Standard/ Class/ Grade - 10 SSC, CBSE - 8 ICSEsaintEmÎncă nu există evaluări
- Topic: Partnership: Do Not Distribute - Highly Confidential 1Document7 paginiTopic: Partnership: Do Not Distribute - Highly Confidential 1Tharun NaniÎncă nu există evaluări
- Reversible and Irreversible ChangesDocument10 paginiReversible and Irreversible ChangesXerish DewanÎncă nu există evaluări
- Chapter Test 2nd Quarter.Document5 paginiChapter Test 2nd Quarter.Roziel MontalbanÎncă nu există evaluări
- Fortinac: Juniper Ex Switch 802.1X-Mac-Authentication Device IntegrationDocument14 paginiFortinac: Juniper Ex Switch 802.1X-Mac-Authentication Device IntegrationSaid bel haj letaiefÎncă nu există evaluări
- Long Quiz Direct VariationDocument2 paginiLong Quiz Direct VariationHermann Dejero LozanoÎncă nu există evaluări
- Kitar FosforusDocument4 paginiKitar FosforusMohd Hakimi MD Setapa100% (1)
- ScriptHookDotNet ReadmeDocument8 paginiScriptHookDotNet ReadmeFajar Hari MuliaÎncă nu există evaluări
- 1 Logic GatesDocument4 pagini1 Logic GatesdassonyÎncă nu există evaluări