S-ar putea să vă placă și
- RefrigerantesDocument16 paginiRefrigerantesandres rodriguezÎncă nu există evaluări
- Dina MicaDocument1 paginăDina Micaandres rodriguezÎncă nu există evaluări
- Activ I Dad Dina Mica ClaseDocument2 paginiActiv I Dad Dina Mica Claseandres rodriguezÎncă nu există evaluări
- Correcion Parcial Segundo CorteDocument3 paginiCorrecion Parcial Segundo Corteandres rodriguezÎncă nu există evaluări
- 1Document3 pagini1andres rodriguezÎncă nu există evaluări
- Proyecto de AccionamientosDocument11 paginiProyecto de Accionamientosandres rodriguezÎncă nu există evaluări
- Beer Mecanica de Materiales 5e Manual de Soluciones c09Document8 paginiBeer Mecanica de Materiales 5e Manual de Soluciones c09andres rodriguezÎncă nu există evaluări
- Taller Tercer Parcial 1 2018Document2 paginiTaller Tercer Parcial 1 2018andres rodriguez0% (1)
- Saber Pro 2018-4Document7 paginiSaber Pro 2018-4andres rodriguez0% (1)
- Valvulas 1Document11 paginiValvulas 1andres rodriguezÎncă nu există evaluări
- Plantilla RateDocument5 paginiPlantilla Rateandres rodriguezÎncă nu există evaluări
- Plantilla IeeeDocument2 paginiPlantilla Ieeemarce_garzona_228898Încă nu există evaluări
- Practica Con Soldadura en Tubos para Aires AcondicionadosDocument9 paginiPractica Con Soldadura en Tubos para Aires Acondicionadosandres rodriguezÎncă nu există evaluări
- Valvulas 1Document11 paginiValvulas 1yuls07Încă nu există evaluări
- Margenes de FormatoDocument1 paginăMargenes de Formatoandres rodriguezÎncă nu există evaluări
- Repaso-Ejercicios de Dominio y RangoDocument1 paginăRepaso-Ejercicios de Dominio y Rangoandres rodriguezÎncă nu există evaluări
- Soluciones Algebraicas de Mecanismos ComunesDocument2 paginiSoluciones Algebraicas de Mecanismos Comunesandres rodriguez0% (1)
- Buena Diapo Termo 2Document23 paginiBuena Diapo Termo 2frankÎncă nu există evaluări
- Ejercicio 8 Ciclo Rankine PDFDocument2 paginiEjercicio 8 Ciclo Rankine PDFMajamar Iguavita GuevaraÎncă nu există evaluări
- Saber Pro 2018-7Document5 paginiSaber Pro 2018-7andres rodriguezÎncă nu există evaluări
- EspañolDocument19 paginiEspañolandres rodriguezÎncă nu există evaluări
- Capitulo - 9 (Ciclo de Potencia Con Vapor)Document31 paginiCapitulo - 9 (Ciclo de Potencia Con Vapor)Ivan JimenezÎncă nu există evaluări
- Saber Pro 2018-7Document5 paginiSaber Pro 2018-7andres rodriguezÎncă nu există evaluări
- Maquinas Simples para NiñosDocument12 paginiMaquinas Simples para NiñosMiguel Rodríguez100% (1)
- Como Entender Las Pruebas SABERDocument20 paginiComo Entender Las Pruebas SABERmilton_dvÎncă nu există evaluări
- Wo Bas Rep 2Document1 paginăWo Bas Rep 2Alejandro Brenes SánchezÎncă nu există evaluări
- HttpsDocument2 paginiHttpsandres rodriguezÎncă nu există evaluări
- HttpsDocument2 paginiHttpsandres rodriguezÎncă nu există evaluări
- Ruta Maestra V 002Document76 paginiRuta Maestra V 002Elkin BelalcazarÎncă nu există evaluări
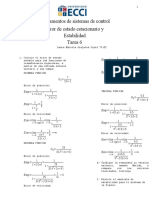
- Tarea4-Fundamentos de Sistemas de ControlDocument7 paginiTarea4-Fundamentos de Sistemas de ControlLaura Marcela Grajales LópezÎncă nu există evaluări
- Eym U1 A4 JebbDocument10 paginiEym U1 A4 JebbJesusÎncă nu există evaluări
- Normas Técnicas Complementarias para Diseño y Construcción Estructuras de MamposteríaDocument6 paginiNormas Técnicas Complementarias para Diseño y Construcción Estructuras de MamposteríaSantiago Loría NavaÎncă nu există evaluări
- Hidraulica de Canales AbiertosDocument60 paginiHidraulica de Canales AbiertosjoelclifÎncă nu există evaluări
- Autoestima, Autocontrol y Autoconcepto en AdolescentesDocument21 paginiAutoestima, Autocontrol y Autoconcepto en AdolescentesFherrasÎncă nu există evaluări
- Caso Practico Unidad 3 Matemáticas AplicadasDocument7 paginiCaso Practico Unidad 3 Matemáticas Aplicadasmiguel lermaÎncă nu există evaluări
- LAB III 5 Intercambiadores de CalorDocument26 paginiLAB III 5 Intercambiadores de CalorMiguelÎncă nu există evaluări
- Triptico de La Fruta ElectricaDocument2 paginiTriptico de La Fruta ElectricaLucila Iparraguirre Toledo100% (1)
- No.1 OSCILACIONES DE TORSION Y MOMENTO DE INERCIADocument3 paginiNo.1 OSCILACIONES DE TORSION Y MOMENTO DE INERCIAJoseÎncă nu există evaluări
- Ejercicios EstadisticaDocument16 paginiEjercicios EstadisticaNorka Anyeli Araoz MassiÎncă nu există evaluări
- Diseño de ColumnasDocument15 paginiDiseño de ColumnasManuel Paucar BenitesÎncă nu există evaluări
- Práctica Calificada de HidrostáticaDocument4 paginiPráctica Calificada de HidrostáticaKevin ArteagaÎncă nu există evaluări
- Sobre La VariabilidadDocument17 paginiSobre La VariabilidadEDUARDO ESCOTO MARTINEZÎncă nu există evaluări
- Espectroscopía de Absorción en El InfrarrojoDocument18 paginiEspectroscopía de Absorción en El InfrarrojoLiliana Huillca MendozaÎncă nu există evaluări
- Vitosol 300-F, Modelo SV3C y SH3CDocument6 paginiVitosol 300-F, Modelo SV3C y SH3CNachoPérezCarrilloÎncă nu există evaluări
- Arnes FolletoDocument2 paginiArnes FolletoeuoÎncă nu există evaluări
- TesisDocument124 paginiTesisFainer Cerpa OliveraÎncă nu există evaluări
- DiMiTri Inside v1.1Document5 paginiDiMiTri Inside v1.1Juan Fernandez CastilloÎncă nu există evaluări
- TALLER DE ESTADISTICA I Este SiDocument14 paginiTALLER DE ESTADISTICA I Este SiJuan MassÎncă nu există evaluări
- Separacion Por GravedadDocument9 paginiSeparacion Por GravedadJessiGrandeÎncă nu există evaluări
- Marco TeóricoDocument6 paginiMarco TeóricoHenrry DonadoÎncă nu există evaluări
- Problem As 34Document7 paginiProblem As 34edwraulÎncă nu există evaluări
- Sesión 01 Formulas para Análisis VectorialDocument5 paginiSesión 01 Formulas para Análisis VectorialDavid MestanzaÎncă nu există evaluări
- t4 Electromagnetismo PDFDocument20 paginit4 Electromagnetismo PDFMANUEL ANGEL ROMEROÎncă nu există evaluări
- Operating Windows Rev 04 Spanish (Ventanas Operativas)Document42 paginiOperating Windows Rev 04 Spanish (Ventanas Operativas)aldoacss_148400122Încă nu există evaluări
- CloroformoDocument7 paginiCloroformosheylaesperanzaÎncă nu există evaluări
- Guía de CapacitoresDocument3 paginiGuía de CapacitoresAriana Márquez0% (1)
- Pruebas Destructivas en El Concreto EndurecidoDocument29 paginiPruebas Destructivas en El Concreto EndurecidoGEXPÎncă nu există evaluări
- Jorge Castillo Control3Document9 paginiJorge Castillo Control3jorge100% (1)
- Ensayo de Corte DirectoDocument4 paginiEnsayo de Corte DirectoEmhr MarÎncă nu există evaluări