S-ar putea să vă placă și
- Partial-Update Adaptive Signal Processing: Design Analysis and ImplementationDe la EverandPartial-Update Adaptive Signal Processing: Design Analysis and ImplementationÎncă nu există evaluări
- Fault Diagnosis For Internal Combustion Engines Using Intake Manifold Pressure and Artificial Neural NetworkDocument10 paginiFault Diagnosis For Internal Combustion Engines Using Intake Manifold Pressure and Artificial Neural NetworkJean Carlos PinedaÎncă nu există evaluări
- An Automotive Generator Fault Diagnosis System Using Discrete WaveletDocument8 paginiAn Automotive Generator Fault Diagnosis System Using Discrete WaveletIván VillamizarÎncă nu există evaluări
- An Expert System For Fault Diagnosis in Internal Combustion Engines Using Probability Neural NetworkDocument2 paginiAn Expert System For Fault Diagnosis in Internal Combustion Engines Using Probability Neural Networksriblue7Încă nu există evaluări
- Implementation of Locally Weighted Projection Regression Network For Condition Monitoring of A Steam TurbineDocument4 paginiImplementation of Locally Weighted Projection Regression Network For Condition Monitoring of A Steam Turbinepurushothaman sinivasanÎncă nu există evaluări
- A Multistage Passive Islanding Detection Method For Synchronous-Based Distributed GenerationDocument11 paginiA Multistage Passive Islanding Detection Method For Synchronous-Based Distributed GenerationAjit kumar SahooÎncă nu există evaluări
- Access 2018 2837621Document12 paginiAccess 2018 2837621salva NdongoÎncă nu există evaluări
- Preprocessing-Free Gear Fault Diagnosis Using Small Datasets With Deep Convolutional Neural Network-Based Transfer LearningDocument13 paginiPreprocessing-Free Gear Fault Diagnosis Using Small Datasets With Deep Convolutional Neural Network-Based Transfer LearningCesar Vargas ArayaÎncă nu există evaluări
- Applsci 09 02950Document10 paginiApplsci 09 02950Mal TitiÎncă nu există evaluări
- 2022 - YANG - A Novel Intelligent Fault Diagnosis Method of Rolling Bearings...Document11 pagini2022 - YANG - A Novel Intelligent Fault Diagnosis Method of Rolling Bearings...igorbassoÎncă nu există evaluări
- 1 s2.0 S0263224120302050 MainDocument12 pagini1 s2.0 S0263224120302050 MainCristian BastiasÎncă nu există evaluări
- Fault Diagnosis Using Discrete Wavelet Transform DWTand Artificial Neural Network ANNfor ARailway SwitchDocument5 paginiFault Diagnosis Using Discrete Wavelet Transform DWTand Artificial Neural Network ANNfor ARailway SwitchJahanzeb MaharÎncă nu există evaluări
- Automatic Fault Diagnosis of Internal Combustion eDocument8 paginiAutomatic Fault Diagnosis of Internal Combustion eznadeem2Încă nu există evaluări
- Eren Et Al-2018-Journal of Signal Processing SystemsDocument12 paginiEren Et Al-2018-Journal of Signal Processing SystemsIvana MilašÎncă nu există evaluări
- Fault Detection and Classification of A Transmission Line Using Discrete Wavelet Transform & Artificial Neural NetworkDocument6 paginiFault Detection and Classification of A Transmission Line Using Discrete Wavelet Transform & Artificial Neural Networkatheer lu'ayÎncă nu există evaluări
- An Adaptive PMU Based Fault Detection/Location Technique For Transmission Lines-Part II: PMU Implementation and Performance EvaluationDocument11 paginiAn Adaptive PMU Based Fault Detection/Location Technique For Transmission Lines-Part II: PMU Implementation and Performance EvaluationHaitam AttiaÎncă nu există evaluări
- Neurocomputing: Karthik Thirumala, Sushmita Pal, Trapti Jain, Amod C. UmarikarDocument10 paginiNeurocomputing: Karthik Thirumala, Sushmita Pal, Trapti Jain, Amod C. UmarikarSuhail KhokharÎncă nu există evaluări
- Stacked Multilevel-Denoising Autoencoders: A New Representation Learning Approach For Wind Turbine Gearbox Fault DiagnosisDocument12 paginiStacked Multilevel-Denoising Autoencoders: A New Representation Learning Approach For Wind Turbine Gearbox Fault Diagnosisaakash parasharÎncă nu există evaluări
- Beraing Fault Detection Using CWT AVMDocument9 paginiBeraing Fault Detection Using CWT AVMLaiba GulÎncă nu există evaluări
- Field Experience With Sweep Frequency Response Analysis For Power Transformer Diagnosis PDFDocument8 paginiField Experience With Sweep Frequency Response Analysis For Power Transformer Diagnosis PDFThien Nguyen VanÎncă nu există evaluări
- Measurement Process of MOSFET Device Parameters WiDocument12 paginiMeasurement Process of MOSFET Device Parameters WinrckswangÎncă nu există evaluări
- Multiple Harmonic Source Detection and Equipment Identification With Cascade Correlation NetworkDocument8 paginiMultiple Harmonic Source Detection and Equipment Identification With Cascade Correlation NetworkmicapesacÎncă nu există evaluări
- Research PaperDocument8 paginiResearch PaperEngr Hassan AbidÎncă nu există evaluări
- Control of Induction Motors by Artificial Neural Networks: J. R. Heredia F. Hidalgo and J.L. DuranDocument3 paginiControl of Induction Motors by Artificial Neural Networks: J. R. Heredia F. Hidalgo and J.L. DuranDeva RajÎncă nu există evaluări
- Research PaperDocument11 paginiResearch PaperEngr Hassan AbidÎncă nu există evaluări
- Indian Institute of Technology (BHU), Varanasi: B.Tech. Project Final ReportDocument9 paginiIndian Institute of Technology (BHU), Varanasi: B.Tech. Project Final ReportEncore GamingÎncă nu există evaluări
- 1 s2.0 S0142061522008493 MainDocument13 pagini1 s2.0 S0142061522008493 MainTyo NgoprekÎncă nu există evaluări
- A Neuro-Fuzzy Approach To Gear System Monitoring: Wilson Wang, Fathy Ismail, and Farid GolnaraghiDocument14 paginiA Neuro-Fuzzy Approach To Gear System Monitoring: Wilson Wang, Fathy Ismail, and Farid GolnaraghiPradeep KunduÎncă nu există evaluări
- 1 s2.0 S0263224121002402 MainDocument19 pagini1 s2.0 S0263224121002402 Mainvikas sharmaÎncă nu există evaluări
- 1 s2.0 S0003682X22005175 MainDocument22 pagini1 s2.0 S0003682X22005175 MainSwapna SinghÎncă nu există evaluări
- Health Monitoring and Fault Detection Using Wavelet Packet Technique and Multivariate Process Control MethodDocument4 paginiHealth Monitoring and Fault Detection Using Wavelet Packet Technique and Multivariate Process Control MethodPradeep KunduÎncă nu există evaluări
- Statistic-Based Method To Monitor Belt Transmission Looseness Through Motor Phase CurrentsDocument9 paginiStatistic-Based Method To Monitor Belt Transmission Looseness Through Motor Phase CurrentsJOEL EZEQUIEL PACHECO MENAÎncă nu există evaluări
- Optimum Power Control For Successive Interference Cancellation With Imperfect Channel EstimationDocument9 paginiOptimum Power Control For Successive Interference Cancellation With Imperfect Channel EstimationSade RinconÎncă nu există evaluări
- Fault Diagnosis in MLIDocument8 paginiFault Diagnosis in MLIGp NAYAGRAH ELECTRICALÎncă nu există evaluări
- Detection and Classification of Faults On Transmission Line Using Wavelet Transform and Neural NetworkDocument6 paginiDetection and Classification of Faults On Transmission Line Using Wavelet Transform and Neural NetworkMohit Kumar ChowdaryÎncă nu există evaluări
- Gearbox Damage Diagnosis Using Wavelet Transform TechniqueDocument8 paginiGearbox Damage Diagnosis Using Wavelet Transform TechniqueDavid TorresÎncă nu există evaluări
- Paper FD With RLDocument13 paginiPaper FD With RLMajd SaiedÎncă nu există evaluări
- An Adaptive Filters Based PMU Algorithm For Both Steady-State and Dynamic Conditions in Distribution NetworksDocument13 paginiAn Adaptive Filters Based PMU Algorithm For Both Steady-State and Dynamic Conditions in Distribution NetworkstiagoÎncă nu există evaluări
- Wind Turbine Simulator Fault Diagnosis Via Fuzzy Modelling and Identification TechniquesDocument8 paginiWind Turbine Simulator Fault Diagnosis Via Fuzzy Modelling and Identification TechniquesAli AlmisbahÎncă nu există evaluări
- Conditional Health Monitoring of Gear Box Using Convolutional Neural NetworkDocument14 paginiConditional Health Monitoring of Gear Box Using Convolutional Neural NetworkKaustav DeÎncă nu există evaluări
- Multiscale Convolutional Neural Networks For Fault Diagnosis of Wind Turbine GearboxDocument12 paginiMultiscale Convolutional Neural Networks For Fault Diagnosis of Wind Turbine GearboxJaimeÎncă nu există evaluări
- A Review On Fault Detection and Allocation Techniques in Power SystemDocument4 paginiA Review On Fault Detection and Allocation Techniques in Power SystemSatyendra Pratap SinghÎncă nu există evaluări
- Neural Network Predictive Control of UPFDocument10 paginiNeural Network Predictive Control of UPFBOUANANE AbdelkrimÎncă nu există evaluări
- Fault Detection and Diagnosis of Induction Machines Based On Wavelet and Probabilistic Neural NetworkDocument7 paginiFault Detection and Diagnosis of Induction Machines Based On Wavelet and Probabilistic Neural Networksuhail ahmadÎncă nu există evaluări
- Analysis of Permanent Magnet Synchronous MotorDocument15 paginiAnalysis of Permanent Magnet Synchronous Motormalini72Încă nu există evaluări
- Design of Online Monitoring and Fault Diagnosis System For Belt Conveyors Based On Wavelet Packet Decomposition and Support Vector MachineDocument10 paginiDesign of Online Monitoring and Fault Diagnosis System For Belt Conveyors Based On Wavelet Packet Decomposition and Support Vector MachineJoão SoaresÎncă nu există evaluări
- Applied Acoustics: D.P. Jena, S.N. PanigrahiDocument14 paginiApplied Acoustics: D.P. Jena, S.N. PanigrahiDibya JenaÎncă nu există evaluări
- Evaluation of Travelling Wave Based Protection SCHDocument6 paginiEvaluation of Travelling Wave Based Protection SCHGeorge Ariel SantillánÎncă nu există evaluări
- T.L Fault DetectionDocument9 paginiT.L Fault DetectionRanjith KumarÎncă nu există evaluări
- Fault Diagnosis Power Systems Using Binary Information of Breakers and Relays Through DpnsDocument5 paginiFault Diagnosis Power Systems Using Binary Information of Breakers and Relays Through Dpnsjose_sa_3Încă nu există evaluări
- A Fuzzy-Controlled Speed Sensorless Induction Motor Drive With Flux Estimators, 1995.Document5 paginiA Fuzzy-Controlled Speed Sensorless Induction Motor Drive With Flux Estimators, 1995.Ali H. NumanÎncă nu există evaluări
- Online Diagnostics in Inverter-Fed Induction Machines Using High-Frequency Signal InjectionDocument9 paginiOnline Diagnostics in Inverter-Fed Induction Machines Using High-Frequency Signal InjectionIvan BallesterosÎncă nu există evaluări
- Integration of Artificial Intelligence Systems For Nuclear Power Plant Surveillance and DiagnosticsDocument9 paginiIntegration of Artificial Intelligence Systems For Nuclear Power Plant Surveillance and DiagnosticsskmrsanjeevÎncă nu există evaluări
- A Hybrid Framework For Fault DetectionDocument10 paginiA Hybrid Framework For Fault DetectionharshaÎncă nu există evaluări
- Data Mining Techniques in Coginitive Radio Network For Smart Home EnvironmentDocument7 paginiData Mining Techniques in Coginitive Radio Network For Smart Home Environmentdr mbaluÎncă nu există evaluări
- Condition Monitoring of A Turbine Using Echo State Neural NetworkDocument9 paginiCondition Monitoring of A Turbine Using Echo State Neural Networkpurushothaman sinivasanÎncă nu există evaluări
- Virtual Multifunction Power Quality Analyzer Based On Adaptive Linear Neural NetworkDocument9 paginiVirtual Multifunction Power Quality Analyzer Based On Adaptive Linear Neural Networksindhuja selvamÎncă nu există evaluări
- Application of Combined Adaptive Fourier Filtering Technique and Fault Detector To Fast Distance ProtectionDocument8 paginiApplication of Combined Adaptive Fourier Filtering Technique and Fault Detector To Fast Distance ProtectiondragomirmarianÎncă nu există evaluări
- 16 MVDC WaveletDocument15 pagini16 MVDC WaveletKarthikkeyan SÎncă nu există evaluări
- Consumo Torque Silverado FORDDocument12 paginiConsumo Torque Silverado FORDJean Carlos PinedaÎncă nu există evaluări
- Final Exam - WritingDocument2 paginiFinal Exam - WritingJean Carlos PinedaÎncă nu există evaluări
- Operating Cost Fuel Consumption and Emission ModelDocument16 paginiOperating Cost Fuel Consumption and Emission ModelJean Carlos PinedaÎncă nu există evaluări
- Diagnostic Methodology For Internal Combustion Diesel Engines Via Noise RadiationDocument9 paginiDiagnostic Methodology For Internal Combustion Diesel Engines Via Noise RadiationJean Carlos PinedaÎncă nu există evaluări
- Auto-Identification of Engine Fault Acoustic Signal Through Inverse Trigonometric Instantaneous Frequency AnalysisDocument8 paginiAuto-Identification of Engine Fault Acoustic Signal Through Inverse Trigonometric Instantaneous Frequency AnalysisJean Carlos PinedaÎncă nu există evaluări
- Fault Diagnosis of Internal Combustion Engines Using Visual Dot Patterns of Acoustic and Vibration SignalsDocument10 paginiFault Diagnosis of Internal Combustion Engines Using Visual Dot Patterns of Acoustic and Vibration SignalsJean Carlos PinedaÎncă nu există evaluări
- Noise Source Identification of Diesel Engine Based On Vacariational Mode Descomposition and Robust Independent Component AnalysisDocument11 paginiNoise Source Identification of Diesel Engine Based On Vacariational Mode Descomposition and Robust Independent Component AnalysisJean Carlos PinedaÎncă nu există evaluări
- Spark Advance Real-Time Optimization Based On Combustion AnalysisDocument11 paginiSpark Advance Real-Time Optimization Based On Combustion AnalysisJean Carlos PinedaÎncă nu există evaluări
- Gan2011 PDFDocument9 paginiGan2011 PDFJean Carlos PinedaÎncă nu există evaluări
- Wavelet Transform Coherence For Magnitude and Phase Spectrum Prediction From High Frequency Transient SignalsDocument6 paginiWavelet Transform Coherence For Magnitude and Phase Spectrum Prediction From High Frequency Transient SignalsJean Carlos PinedaÎncă nu există evaluări
- Misfire Detection of A Turbocharged Diesel Engine by Using Artificial Neural NetworksDocument7 paginiMisfire Detection of A Turbocharged Diesel Engine by Using Artificial Neural NetworksJean Carlos PinedaÎncă nu există evaluări
- Failure and Reliability Predictions by Infinite Impulse Response Locally Recurrent Neural NetworksDocument8 paginiFailure and Reliability Predictions by Infinite Impulse Response Locally Recurrent Neural NetworksJean Carlos PinedaÎncă nu există evaluări
- A Study of Algorithm and Application in Transient Signals Wavelet Post-Analysis MethodsDocument6 paginiA Study of Algorithm and Application in Transient Signals Wavelet Post-Analysis MethodsJean Carlos PinedaÎncă nu există evaluări
- A Review of Prechamber Ignition Systems As Lean Combustion Technology For SI EnginesDocument14 paginiA Review of Prechamber Ignition Systems As Lean Combustion Technology For SI EnginesJean Carlos PinedaÎncă nu există evaluări
- Compensation Map Calibration of Engine Management Systems Using Least-Squares Support Vector Committee Machine and Evolutionary OptimizationDocument18 paginiCompensation Map Calibration of Engine Management Systems Using Least-Squares Support Vector Committee Machine and Evolutionary OptimizationJean Carlos PinedaÎncă nu există evaluări
- Gan2011 PDFDocument9 paginiGan2011 PDFJean Carlos PinedaÎncă nu există evaluări
- A New Automatic Spark Generation System For Gasoline EnginesDocument6 paginiA New Automatic Spark Generation System For Gasoline EnginesJean Carlos PinedaÎncă nu există evaluări
- Research On Active Control of Diesel Engine Based On Wavelet Neural NetworkDocument4 paginiResearch On Active Control of Diesel Engine Based On Wavelet Neural NetworkJean Carlos PinedaÎncă nu există evaluări
- Formulation Reproducing The Ignition Delays Simulated by A Detailed Mechanism: Application To N-Heptane CombustionDocument29 paginiFormulation Reproducing The Ignition Delays Simulated by A Detailed Mechanism: Application To N-Heptane CombustionJean Carlos PinedaÎncă nu există evaluări
- Paper2 PDFDocument9 paginiPaper2 PDFJean Carlos PinedaÎncă nu există evaluări
- Red Neuronal Que Determina El Tiempo de IgnicionDocument7 paginiRed Neuronal Que Determina El Tiempo de IgnicionJean Carlos PinedaÎncă nu există evaluări
- Spectrometer Complements ENGDocument85 paginiSpectrometer Complements ENGJean Carlos PinedaÎncă nu există evaluări
- Predictions FutureDocument15 paginiPredictions FutureJean Carlos PinedaÎncă nu există evaluări
- Lptop Toshiba Schematic l100Document27 paginiLptop Toshiba Schematic l100Swati BaslaÎncă nu există evaluări
- ASSIGNMENT Operating SystemDocument15 paginiASSIGNMENT Operating SystemkaranÎncă nu există evaluări
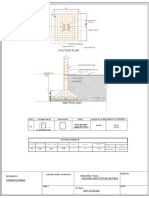
- Column Detail PDFDocument1 paginăColumn Detail PDFShubham KushwahaÎncă nu există evaluări
- Super Critical BoilerDocument32 paginiSuper Critical BoilerSyaiful Fuad89% (9)
- Mahjong - Google SearchDocument1 paginăMahjong - Google SearchSteve LaceyÎncă nu există evaluări
- Modular Prefabricated Residential Construction PDFDocument90 paginiModular Prefabricated Residential Construction PDFSong Kai YiÎncă nu există evaluări
- Coconut Fatty Acid Diethanolamide - CDE 85Document6 paginiCoconut Fatty Acid Diethanolamide - CDE 85Iqbal batchaÎncă nu există evaluări
- Six Essential Skills For Managing ConflictDocument4 paginiSix Essential Skills For Managing ConflictErdi Karatepe100% (2)
- Transaxle - TECUMSEH PEERLESS TRANSAXLE MST 205-535EDocument3 paginiTransaxle - TECUMSEH PEERLESS TRANSAXLE MST 205-535EJindřich Nenza100% (1)
- Thimble, Ferrule, & Wire Rope Grip by Ronstan - CatalogueDocument2 paginiThimble, Ferrule, & Wire Rope Grip by Ronstan - CatalogueJogi Oscar SinagaÎncă nu există evaluări
- Write Up of EmlDocument7 paginiWrite Up of EmlNeeraj GuptaÎncă nu există evaluări
- Portable Document Format Reference Manual - Version 1.1Document298 paginiPortable Document Format Reference Manual - Version 1.1Akihito Hashimoto100% (1)
- XK3101 (HL-2065) IndicatorDocument20 paginiXK3101 (HL-2065) IndicatorEliana Cristina100% (1)
- Site Preparation and Earth WorkDocument31 paginiSite Preparation and Earth WorkGerobak Gaya100% (2)
- HNC 8 Commissioning Manual Lathe v2.4Document115 paginiHNC 8 Commissioning Manual Lathe v2.4Sam eagle goodÎncă nu există evaluări
- eMan-KSB ETAPUMP® Solar Water Pump Instruction ManualDocument43 paginieMan-KSB ETAPUMP® Solar Water Pump Instruction ManualMoly69xÎncă nu există evaluări
- Powerscreen University Bronze & Silver Links - Feb 2020Document5 paginiPowerscreen University Bronze & Silver Links - Feb 2020Andres AstudilloÎncă nu există evaluări
- SipDocument27 paginiSipsarjana youtubeÎncă nu există evaluări
- 4313 Repair Mainshaft OHDocument38 pagini4313 Repair Mainshaft OHYasin Noer Huda PÎncă nu există evaluări
- Detroit Diesel Training Manual Fans and Fan Shrouds AbbyDocument11 paginiDetroit Diesel Training Manual Fans and Fan Shrouds AbbyMohamed Abo elkhairÎncă nu există evaluări
- RCA Grate Cooler.Document2 paginiRCA Grate Cooler.Amir ShehzadÎncă nu există evaluări
- Canon Ir3225n Ir3235n Ir3245n PrintersDocument4 paginiCanon Ir3225n Ir3235n Ir3245n PrintersirteenÎncă nu există evaluări
- Debugger ToolsDocument11 paginiDebugger ToolsvuppalasampathÎncă nu există evaluări
- D601005184 Man 001Document17 paginiD601005184 Man 001Riski Kurniawan100% (1)
- VISI ProgressDocument4 paginiVISI Progressชัยรัตน์ ตันตืไพบูลย์วุฒิÎncă nu există evaluări
- Operations ManagementDocument57 paginiOperations Managementnasirmalik72Încă nu există evaluări
- VW t4 Libretto ManutenzioneDocument301 paginiVW t4 Libretto Manutenzionelorant hathaziÎncă nu există evaluări
- SIMADYN Dyn Hardware eDocument308 paginiSIMADYN Dyn Hardware emacakafkaÎncă nu există evaluări
- 22 RNG PDFDocument41 pagini22 RNG PDFJuan DomaniczkyÎncă nu există evaluări
- Alstom-Gas - Steam PDFDocument20 paginiAlstom-Gas - Steam PDFArunkumar ChandaranÎncă nu există evaluări