S-ar putea să vă placă și
- Ac-1 Summer 2015Document1 paginăAc-1 Summer 2015palak parmarÎncă nu există evaluări
- CEN 01 2018 ALP TechniciansDocument3 paginiCEN 01 2018 ALP Technicianspalak parmarÎncă nu există evaluări
- Ac-1 Summer 2016Document2 paginiAc-1 Summer 2016palak parmarÎncă nu există evaluări
- Lecture8 MOS TransistorDocument21 paginiLecture8 MOS Transistorpalak parmarÎncă nu există evaluări
- Data Communication and NetworkingDocument1 paginăData Communication and Networkingpalak parmarÎncă nu există evaluări
- Fundamentals of Digital Image ProcessingDocument3 paginiFundamentals of Digital Image Processingpalak parmarÎncă nu există evaluări
- 9780198070788Document52 pagini9780198070788palak parmarÎncă nu există evaluări
- Design and Implementation of The Lab Remote Monitoring and Controlling System Based On Embedded Web TechnologyDocument4 paginiDesign and Implementation of The Lab Remote Monitoring and Controlling System Based On Embedded Web Technologypalak parmarÎncă nu există evaluări
- Topic 1 Digital Image Fundamentals PDFDocument30 paginiTopic 1 Digital Image Fundamentals PDFpalak parmarÎncă nu există evaluări
- Embedded SystemsDocument1 paginăEmbedded Systemspalak parmarÎncă nu există evaluări
- Rs 232 & Rs 422 StandardDocument27 paginiRs 232 & Rs 422 Standardpalak parmar100% (3)
- TSRWDocument33 paginiTSRWpalak parmarÎncă nu există evaluări
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Assignment 2 Management Perspective Son Leadership MotivationDocument14 paginiAssignment 2 Management Perspective Son Leadership MotivationHoneyVasudevÎncă nu există evaluări
- Helena HelsenDocument2 paginiHelena HelsenragastrmaÎncă nu există evaluări
- Baptismal DelayDocument20 paginiBaptismal DelayfiohdiohhodoÎncă nu există evaluări
- SFC PresentationDocument51 paginiSFC PresentationjmtriggerzÎncă nu există evaluări
- Central Venous PressureDocument3 paginiCentral Venous PressureHuy NguyễnÎncă nu există evaluări
- ABS CBN CorporationDocument16 paginiABS CBN CorporationAlyssa BeatriceÎncă nu există evaluări
- Sheiko 13week Beginner ProgramDocument16 paginiSheiko 13week Beginner ProgramAnders DahlÎncă nu există evaluări
- Baltrushes2006 PDFDocument46 paginiBaltrushes2006 PDFsilikondioksidaÎncă nu există evaluări
- Upsa Y5 2023Document8 paginiUpsa Y5 2023Faizal AzrinÎncă nu există evaluări
- SIDPAC Standard Data Channels: Ch. No. Symbols Description UnitsDocument2 paginiSIDPAC Standard Data Channels: Ch. No. Symbols Description UnitsRGFEÎncă nu există evaluări
- Tele-Medicine: Presented by Shyam.s.s I Year M.SC NursingDocument12 paginiTele-Medicine: Presented by Shyam.s.s I Year M.SC NursingShyamÎncă nu există evaluări
- Impact of Technology On Our LivesDocument3 paginiImpact of Technology On Our LivesKim ErandioÎncă nu există evaluări
- Register A Custom Table in Apps SchemaDocument5 paginiRegister A Custom Table in Apps SchemaIapps ErpSolutionsÎncă nu există evaluări
- Liebherr PR 712 Litronic Final DrivesDocument8 paginiLiebherr PR 712 Litronic Final DrivesLiebherr75% (4)
- Blaine Ray HandoutDocument24 paginiBlaine Ray Handoutaquilesanchez100% (1)
- The "Kind Martin" Strategy - Official Olymp Trade BlogDocument7 paginiThe "Kind Martin" Strategy - Official Olymp Trade BlogGopal NapoleonÎncă nu există evaluări
- Far Eastern University Mba - Thesis 060517Document2 paginiFar Eastern University Mba - Thesis 060517Lex AcadsÎncă nu există evaluări
- Assessment 3 Comparative Analysis Primary Vs Secondary SourcesDocument5 paginiAssessment 3 Comparative Analysis Primary Vs Secondary SourcesMATOZA, YLJOE V.Încă nu există evaluări
- Consumer Perception Towards WhatsappDocument72 paginiConsumer Perception Towards WhatsappRaj KumarÎncă nu există evaluări
- Danielson Observation FormDocument5 paginiDanielson Observation Formapi-242909722Încă nu există evaluări
- Obat Keras N0vember 2021Document137 paginiObat Keras N0vember 2021antonÎncă nu există evaluări
- Data Processing and Management Information System (AvtoBərpaEdilmiş)Document6 paginiData Processing and Management Information System (AvtoBərpaEdilmiş)2304 Abhishek vermaÎncă nu există evaluări
- Chinese MedicineDocument16 paginiChinese MedicineTrisÎncă nu există evaluări
- Handout No. 03 - Purchase TransactionsDocument4 paginiHandout No. 03 - Purchase TransactionsApril SasamÎncă nu există evaluări
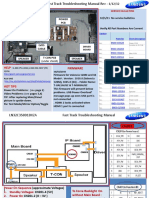
- Samsung LN55C610N1FXZA Fast Track Guide (SM)Document4 paginiSamsung LN55C610N1FXZA Fast Track Guide (SM)Carlos OdilonÎncă nu există evaluări
- A Visual Rhetoric StudyDocument32 paginiA Visual Rhetoric StudylpettenkoferÎncă nu există evaluări
- IELTS Materials ReadingDocument9 paginiIELTS Materials ReadingßläcklìsètèdTȜè0% (1)
- What Is StevedoringDocument10 paginiWhat Is StevedoringMinhaj KmÎncă nu există evaluări
- Shaira Narrative Report (Final)Document7 paginiShaira Narrative Report (Final)Sheryll TamangÎncă nu există evaluări
- D904 - D906 - D914 - D916 - D924 - D926 - 8718458 - 04092008 - v02 - enDocument218 paginiD904 - D906 - D914 - D916 - D924 - D926 - 8718458 - 04092008 - v02 - enАлексей89% (18)