S-ar putea să vă placă și
- 0026 AnirvinNarayan Math HL IADocument21 pagini0026 AnirvinNarayan Math HL IAAnirvin Narayan92% (13)
- "Probability Models For Hockey Betting" Ravi Patel IB SL MathDocument9 pagini"Probability Models For Hockey Betting" Ravi Patel IB SL MathVLONE100% (3)
- IA Mathematics SL Volume by RevolutionDocument28 paginiIA Mathematics SL Volume by Revolutionhumanistale86% (7)
- Math IADocument11 paginiMath IAOliver Homa100% (5)
- IA-How Does GPS WorkDocument15 paginiIA-How Does GPS WorkHuy Bui50% (2)
- Math IADocument16 paginiMath IAKrish Rambhiya100% (2)
- Lewis Corporation Case 6-2 - Group 5Document8 paginiLewis Corporation Case 6-2 - Group 5Om Prakash100% (1)
- Math IaDocument14 paginiMath IaShafin MohammedÎncă nu există evaluări
- Brachistochrone Curve Math IA FinalDocument21 paginiBrachistochrone Curve Math IA FinalDhiman Roy100% (2)
- Sample Math IA IB 2Document8 paginiSample Math IA IB 2Nana_Patekar6963% (8)
- Correlation Between Health Expenditure, GDP and Infant Mortality in IndiaDocument38 paginiCorrelation Between Health Expenditure, GDP and Infant Mortality in IndiaBhanu Pratap Singh100% (1)
- Correlation Between Height and Stolen Bases of 2014 UF Softball PlayersDocument12 paginiCorrelation Between Height and Stolen Bases of 2014 UF Softball PlayersCaptainSoySucks50% (2)
- Math Ia - Ib Math StudiesDocument22 paginiMath Ia - Ib Math StudiesJezi Christia Mari Llamas100% (3)
- Math IA HLDocument13 paginiMath IA HLDev Shah100% (6)
- IB Mathematics HL Internal AssessmentDocument18 paginiIB Mathematics HL Internal AssessmentZinzan Gurney100% (20)
- IB HL Maths - Maths Exploration - CycloidDocument23 paginiIB HL Maths - Maths Exploration - CycloidPhạm Minh Tuệ75% (4)
- Logistic Equation Math IADocument16 paginiLogistic Equation Math IAAnthony Lu50% (2)
- Math Ia Final PDFDocument6 paginiMath Ia Final PDFVyshnavi ReddyÎncă nu există evaluări
- Cab&Chaissis ElectricalDocument323 paginiCab&Chaissis Electricaltipo3331100% (13)
- Math IA HLDocument15 paginiMath IA HLDev ShahÎncă nu există evaluări
- Math EE IBDocument16 paginiMath EE IBCalc girl ReddingtonÎncă nu există evaluări
- Math Ia SampleDocument14 paginiMath Ia SampleJKÎncă nu există evaluări
- Math Internal AssessmentDocument10 paginiMath Internal AssessmentKyle Anderson100% (2)
- Maths SL IADocument22 paginiMaths SL IANavjosh83% (6)
- IB Math SL Type II IA Help "China Population Trends"Document10 paginiIB Math SL Type II IA Help "China Population Trends"phantomdancer100% (7)
- Math IA FinalDocument22 paginiMath IA FinalDhiman RoyÎncă nu există evaluări
- MathHL IA (SolidsOfRevolution) PDFDocument13 paginiMathHL IA (SolidsOfRevolution) PDFlaiba bilal67% (3)
- Math Ia Regression3Document16 paginiMath Ia Regression3api-373635046100% (1)
- Microsoft Word - Math Ia - Final FinalDocument28 paginiMicrosoft Word - Math Ia - Final FinalAlisha Narula100% (2)
- Modelling Periodic Functions with Sine WavesDocument10 paginiModelling Periodic Functions with Sine WavesDanny Leng100% (1)
- Math IaDocument14 paginiMath IaChirag Hablani100% (3)
- Math IaDocument19 paginiMath IaBao C Q Nguyen83% (6)
- Math AA HLDocument30 paginiMath AA HLAryan WaghdhareÎncă nu există evaluări
- Math IaDocument10 paginiMath Iaapi-448713420Încă nu există evaluări
- Math IADocument13 paginiMath IAOm RanjalkarÎncă nu există evaluări
- Introduction Math IaDocument4 paginiIntroduction Math Iarussell_mahmood0% (1)
- Transcendental MeditationDocument9 paginiTranscendental MeditationMehmet Ozan BaykanÎncă nu există evaluări
- Kathy Davis - Dancing Tango - Passionate Encounters in A Globalizing World-New York University Press (2015)Document236 paginiKathy Davis - Dancing Tango - Passionate Encounters in A Globalizing World-New York University Press (2015)Csongor KicsiÎncă nu există evaluări
- ISO 13485-2016 - DR - Pack - Control of Non Conforming ProductsDocument4 paginiISO 13485-2016 - DR - Pack - Control of Non Conforming ProductskmasanÎncă nu există evaluări
- Investigating Parametric Equations in Motion ProblemsDocument16 paginiInvestigating Parametric Equations in Motion ProblemsByron JimenezÎncă nu există evaluări
- Maths IA - Optimisation & CalculusDocument12 paginiMaths IA - Optimisation & CalculusNupur Gupta100% (1)
- Math IADocument9 paginiMath IASamruddhiSatav100% (2)
- Maths IADocument10 paginiMaths IAkarenÎncă nu există evaluări
- Math IADocument21 paginiMath IASD ExploreÎncă nu există evaluări
- POPULATION TRENDS IN CHINADocument2 paginiPOPULATION TRENDS IN CHINAMongoosiaÎncă nu există evaluări
- Math Ia PDFDocument12 paginiMath Ia PDFShreyasSÎncă nu există evaluări
- MATH IA FINAL DRAFT (Fadhali)Document22 paginiMATH IA FINAL DRAFT (Fadhali)wanÎncă nu există evaluări
- Analyzing the 2014 Ebola Outbreak with the SIR ModelDocument18 paginiAnalyzing the 2014 Ebola Outbreak with the SIR Modeljazzycat08Încă nu există evaluări
- IB, Mathematics Higher Level PortfolioDocument16 paginiIB, Mathematics Higher Level PortfolioAgnieszka100% (1)
- Math IA Final - David DohertyDocument11 paginiMath IA Final - David DohertyTobi DohertyÎncă nu există evaluări
- Maths IADocument2 paginiMaths IALoic RobillotÎncă nu există evaluări
- Exemplar Math IADocument8 paginiExemplar Math IAChristina Wahle100% (4)
- Math IaDocument19 paginiMath Iakanishk guptaÎncă nu există evaluări
- Maths Internal Assessment Type 2 Modeling A Functional BuildingDocument14 paginiMaths Internal Assessment Type 2 Modeling A Functional BuildingJoseph Crawley100% (1)
- Exemplar Maths - IADocument12 paginiExemplar Maths - IAAbrarAbtaheeÎncă nu există evaluări
- Internal Assessment Mathematics (HL) - Modeling The Infrastructure Budget of Samarinda and Surabaya Cities Based On Population and WageDocument14 paginiInternal Assessment Mathematics (HL) - Modeling The Infrastructure Budget of Samarinda and Surabaya Cities Based On Population and WageSadhaSatyaLotan100% (6)
- Math Studies IaDocument6 paginiMath Studies Iaapi-285168683Încă nu există evaluări
- Mathematical Exploration: A Student's GuideDocument11 paginiMathematical Exploration: A Student's GuideGirish MishraÎncă nu există evaluări
- Ib Math Correlation IaDocument11 paginiIb Math Correlation IaAkshath KarthikeyanÎncă nu există evaluări
- Mathematics Exploration Game TheoryDocument5 paginiMathematics Exploration Game TheoryAlex Betz100% (2)
- Traffic Flow - WikipediaDocument146 paginiTraffic Flow - WikipediaAngeline AgunatÎncă nu există evaluări
- Traffic Flow and Analysis of RoadsDocument14 paginiTraffic Flow and Analysis of RoadsJayson J. Pagal100% (1)
- Modeling Traffic's Flow-Density Relation: Accommodation of Multiple Flow Regimes and Traveler TypesDocument18 paginiModeling Traffic's Flow-Density Relation: Accommodation of Multiple Flow Regimes and Traveler Typeshaider036Încă nu există evaluări
- Data-Driven Traffic Engineering: Understanding of Traffic and Applications Based on Three-Phase Traffic TheoryDe la EverandData-Driven Traffic Engineering: Understanding of Traffic and Applications Based on Three-Phase Traffic TheoryÎncă nu există evaluări
- Dynamic Bayesian Networks: Fundamentals and ApplicationsDe la EverandDynamic Bayesian Networks: Fundamentals and ApplicationsÎncă nu există evaluări
- About CAS For 11th GradeDocument3 paginiAbout CAS For 11th GradeMehmet Ozan BaykanÎncă nu există evaluări
- Mehmet Ozan Baykan Bliss 2nd TaskDocument2 paginiMehmet Ozan Baykan Bliss 2nd TaskMehmet Ozan BaykanÎncă nu există evaluări
- Clarkson 2005Document4 paginiClarkson 2005Mehmet Ozan BaykanÎncă nu există evaluări
- The Total LibraryDocument3 paginiThe Total Library1noone1100% (1)
- Assignment 3Document2 paginiAssignment 3Mehmet Ozan BaykanÎncă nu există evaluări
- Auc Admissions Guidelines 2017 2018 FinalDocument6 paginiAuc Admissions Guidelines 2017 2018 FinalMehmet Ozan BaykanÎncă nu există evaluări
- Saribay 2018Document7 paginiSaribay 2018Mehmet Ozan BaykanÎncă nu există evaluări
- Mehmet Ozan Baykan Bliss 1st TaskDocument3 paginiMehmet Ozan Baykan Bliss 1st TaskMehmet Ozan BaykanÎncă nu există evaluări
- Arieli Babichenko Peretz YoungDocument38 paginiArieli Babichenko Peretz YoungMehmet Ozan BaykanÎncă nu există evaluări
- Roberts 2013Document25 paginiRoberts 2013Mehmet Ozan BaykanÎncă nu există evaluări
- Soviet Bloc Intelligence and Its AIDS Disinformation CampaignDocument24 paginiSoviet Bloc Intelligence and Its AIDS Disinformation CampaignAntônio SantosÎncă nu există evaluări
- Gettier JTBDocument3 paginiGettier JTBwaiÎncă nu există evaluări
- SAP IDOC OverviewDocument23 paginiSAP IDOC OverviewMehmet Ozan BaykanÎncă nu există evaluări
- Nature and Powe R: More InformationDocument17 paginiNature and Powe R: More InformationMehmet Ozan BaykanÎncă nu există evaluări
- VWS Ref YogaDocument75 paginiVWS Ref YogaMehmet Ozan BaykanÎncă nu există evaluări
- VWS Ref YogaDocument30 paginiVWS Ref YogaNitin PatilÎncă nu există evaluări
- Articles: Policing Stabilizes Construction of Social Niches in PrimatesDocument4 paginiArticles: Policing Stabilizes Construction of Social Niches in PrimatesMehmet Ozan BaykanÎncă nu există evaluări
- Aydin 2017Document13 paginiAydin 2017Mehmet Ozan BaykanÎncă nu există evaluări
- Groningen EssayDocument1 paginăGroningen EssayMehmet Ozan BaykanÎncă nu există evaluări
- BoC PassagesDocument5 paginiBoC PassagesMehmet Ozan BaykanÎncă nu există evaluări
- Ben S Bernanke Money Gold and The Great DepressionDocument8 paginiBen S Bernanke Money Gold and The Great Depressionseanpark22Încă nu există evaluări
- A Platonic Approach To Modern PhysicsDocument1 paginăA Platonic Approach To Modern PhysicsMehmet Ozan BaykanÎncă nu există evaluări
- Ben S Bernanke Money Gold and The Great DepressionDocument8 paginiBen S Bernanke Money Gold and The Great Depressionseanpark22Încă nu există evaluări
- Telling Lies and StoriesDocument18 paginiTelling Lies and StoriesMehmet Ozan BaykanÎncă nu există evaluări
- Physics Experiments enDocument123 paginiPhysics Experiments enMehmet Ozan BaykanÎncă nu există evaluări
- 1 in The Hall of The Mountain King: Bassoons (Grade 4/5)Document2 pagini1 in The Hall of The Mountain King: Bassoons (Grade 4/5)Mehmet Ozan BaykanÎncă nu există evaluări
- Physics Experiments enDocument123 paginiPhysics Experiments enMehmet Ozan BaykanÎncă nu există evaluări
- Command List-6Document3 paginiCommand List-6Carlos ArbelaezÎncă nu există evaluări
- LegoDocument30 paginiLegomzai2003Încă nu există evaluări
- Pfr140 User ManualDocument4 paginiPfr140 User ManualOanh NguyenÎncă nu există evaluări
- Ielts Practice Tests: ListeningDocument19 paginiIelts Practice Tests: ListeningKadek Santiari DewiÎncă nu există evaluări
- 2010 HD Part Cat. LBBDocument466 pagini2010 HD Part Cat. LBBBuddy ButlerÎncă nu există evaluări
- Corporate Governance, Corporate Profitability Toward Corporate Social Responsibility Disclosure and Corporate Value (Comparative Study in Indonesia, China and India Stock Exchange in 2013-2016) .Document18 paginiCorporate Governance, Corporate Profitability Toward Corporate Social Responsibility Disclosure and Corporate Value (Comparative Study in Indonesia, China and India Stock Exchange in 2013-2016) .Lia asnamÎncă nu există evaluări
- Guide To Raising Capital From Angel Investors Ebook From The Startup Garage PDFDocument20 paginiGuide To Raising Capital From Angel Investors Ebook From The Startup Garage PDFLars VonTurboÎncă nu există evaluări
- Alignment of Railway Track Nptel PDFDocument18 paginiAlignment of Railway Track Nptel PDFAshutosh MauryaÎncă nu există evaluări
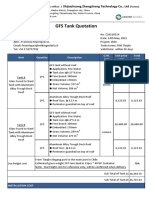
- GFS Tank Quotation C20210514Document4 paginiGFS Tank Quotation C20210514Francisco ManriquezÎncă nu există evaluări
- SDS OU1060 IPeptideDocument6 paginiSDS OU1060 IPeptideSaowalak PhonseeÎncă nu există evaluări
- 1st SemDocument3 pagini1st SemARUPARNA MAITYÎncă nu există evaluări
- Advantages of Using Mobile ApplicationsDocument30 paginiAdvantages of Using Mobile ApplicationsGian Carlo LajarcaÎncă nu există evaluări
- Prlude No BWV in C MinorDocument3 paginiPrlude No BWV in C MinorFrédéric LemaireÎncă nu există evaluări
- LSMW With Rfbibl00Document14 paginiLSMW With Rfbibl00abbasx0% (1)
- NLP Business Practitioner Certification Course OutlineDocument11 paginiNLP Business Practitioner Certification Course OutlineabobeedoÎncă nu există evaluări
- Precision Machine Components: NSK Linear Guides Ball Screws MonocarriersDocument564 paginiPrecision Machine Components: NSK Linear Guides Ball Screws MonocarriersDorian Cristian VatavuÎncă nu există evaluări
- Ratio Analysis of PIADocument16 paginiRatio Analysis of PIAMalik Saad Noman100% (5)
- Master SEODocument8 paginiMaster SEOOkane MochiÎncă nu există evaluări
- TJUSAMO 2013-2014 Modular ArithmeticDocument4 paginiTJUSAMO 2013-2014 Modular ArithmeticChanthana ChongchareonÎncă nu există evaluări
- Essential Rendering BookDocument314 paginiEssential Rendering BookHelton OliveiraÎncă nu există evaluări
- United States Bankruptcy Court Southern District of New YorkDocument21 paginiUnited States Bankruptcy Court Southern District of New YorkChapter 11 DocketsÎncă nu există evaluări
- Get Oracle Order DetailsDocument4 paginiGet Oracle Order Detailssiva_lordÎncă nu există evaluări
- Ovr IbDocument27 paginiOvr IbAriel CaresÎncă nu există evaluări
- Product Data Sheet For CP 680-P and CP 680-M Cast-In Firestop Devices Technical Information ASSET DOC LOC 1540966Document1 paginăProduct Data Sheet For CP 680-P and CP 680-M Cast-In Firestop Devices Technical Information ASSET DOC LOC 1540966shama093Încă nu există evaluări
- Prac Res Q2 Module 1Document14 paginiPrac Res Q2 Module 1oea aoueoÎncă nu există evaluări
- Grading System The Inconvenient Use of The Computing Grades in PortalDocument5 paginiGrading System The Inconvenient Use of The Computing Grades in PortalJm WhoooÎncă nu există evaluări