S-ar putea să vă placă și
- Numerical Kerr orbit calculationDocument26 paginiNumerical Kerr orbit calculationagapi2302Încă nu există evaluări
- Graphoidal Tree D - CoverDocument13 paginiGraphoidal Tree D - CoverDon HassÎncă nu există evaluări
- Cototal Domination in Line GraphsDocument8 paginiCototal Domination in Line GraphsTJPRC PublicationsÎncă nu există evaluări
- Directed Covering With BlockDocument22 paginiDirected Covering With BlockmouhabaldeÎncă nu există evaluări
- 06 Network Models-2Document46 pagini06 Network Models-2watriÎncă nu există evaluări
- CMSC 451: Lecture 13 All-Pairs Shortest Paths and The Floyd-Warshall AlgorithmDocument5 paginiCMSC 451: Lecture 13 All-Pairs Shortest Paths and The Floyd-Warshall AlgorithmAnthony-Dimitri AÎncă nu există evaluări
- 2023 TIA Mid Sem Winter22 23Document6 pagini2023 TIA Mid Sem Winter22 23Aaron JosephÎncă nu există evaluări
- Analysis Chapter4Document8 paginiAnalysis Chapter4Ian KrebsÎncă nu există evaluări
- The motion of particles in curved spacetimeDocument4 paginiThe motion of particles in curved spacetimeSagnik MisraÎncă nu există evaluări
- Cs 229, Autumn 2016 Problem Set #2: Naive Bayes, SVMS, and TheoryDocument20 paginiCs 229, Autumn 2016 Problem Set #2: Naive Bayes, SVMS, and TheoryZeeshan Ali SayyedÎncă nu există evaluări
- ME 163 Using Mathematica To Construct Phase Plane PlotsDocument31 paginiME 163 Using Mathematica To Construct Phase Plane PlotsMohamed ElfekyÎncă nu există evaluări
- Corr MatchfilterDocument4 paginiCorr MatchfilterObli VikramÎncă nu există evaluări
- Exfall2021 With SolutionsDocument8 paginiExfall2021 With SolutionsJulius DesertusÎncă nu există evaluări
- Lecture Notes (Chapter 1.1 Part2 - ContourLines, Level Curves and 3D Graphs) PDFDocument3 paginiLecture Notes (Chapter 1.1 Part2 - ContourLines, Level Curves and 3D Graphs) PDFIza HamdanÎncă nu există evaluări
- Matlab code to analyze functions and calculate integralsDocument6 paginiMatlab code to analyze functions and calculate integralsAnurag JoshiÎncă nu există evaluări
- Uconn ECE6439 Final 2015Document3 paginiUconn ECE6439 Final 2015Nemo OutisÎncă nu există evaluări
- Modular Forms ProjectDocument4 paginiModular Forms ProjectwapaezgÎncă nu există evaluări
- Wing Hong Tony Wong: R R R 2RDocument5 paginiWing Hong Tony Wong: R R R 2RRich WongÎncă nu există evaluări
- 141 03Test1SolDocument3 pagini141 03Test1SolHelena BogdzelÎncă nu există evaluări
- Math-III End SemDocument1 paginăMath-III End SemNitesh SinghÎncă nu există evaluări
- Chapter 11Document15 paginiChapter 11John Emmanuel PacresÎncă nu există evaluări
- June 29 2022 Jee Main Shift 2 Mathematics SolutionDocument7 paginiJune 29 2022 Jee Main Shift 2 Mathematics SolutionPiyush kumarÎncă nu există evaluări
- Assignment08 MAI101Document2 paginiAssignment08 MAI101idforig32Încă nu există evaluări
- All Pairs Shortest Path: Presented By: Sudeep SharmaDocument13 paginiAll Pairs Shortest Path: Presented By: Sudeep SharmaSudeep SharmaÎncă nu există evaluări
- D D 0 D D 0 D 0 0 2 0 D D 0 D 0 D D 0 D 0 0Document25 paginiD D 0 D D 0 D 0 0 2 0 D D 0 D 0 D D 0 D 0 0Anish Kumar DasÎncă nu există evaluări
- Dawson College Final Exam for Calculus-III (201-BZF-05Document14 paginiDawson College Final Exam for Calculus-III (201-BZF-05adcyechicon123Încă nu există evaluări
- Properties of DerivativeDocument1 paginăProperties of Derivativekyla escotoÎncă nu există evaluări
- Taller CalculoDocument4 paginiTaller CalculoWendys Vianey Benavides TorresÎncă nu există evaluări
- MTH517 MATLAB Solve Simple EquationsDocument2 paginiMTH517 MATLAB Solve Simple EquationsShavin ChandÎncă nu există evaluări
- 2013 Dec Final ExamDocument4 pagini2013 Dec Final ExamHarry KwongÎncă nu există evaluări
- Solution/: Q1/ Find X (Z) From The DiagramDocument2 paginiSolution/: Q1/ Find X (Z) From The Diagramحسين طاهر بهر.Încă nu există evaluări
- Multiple Integration: Sphere 3Document5 paginiMultiple Integration: Sphere 3simon georgeÎncă nu există evaluări
- ArticleDocument14 paginiArticlealipirkhedriÎncă nu există evaluări
- Khulna University: An Assignment On Mathematical BiologyDocument18 paginiKhulna University: An Assignment On Mathematical Biologyjoy bakshiÎncă nu există evaluări
- MAT391 EXAM KEY (November 2022)Document11 paginiMAT391 EXAM KEY (November 2022)lisamundanga84Încă nu există evaluări
- Solution To CS 5104 Take-Home QuizDocument2 paginiSolution To CS 5104 Take-Home QuizkhawarbashirÎncă nu există evaluări
- Linear Algebraic Equations SolverDocument51 paginiLinear Algebraic Equations SolverNata CorpÎncă nu există evaluări
- Week5 Calculus of VectorsDocument6 paginiWeek5 Calculus of VectorsAzeez AdegbiteÎncă nu există evaluări
- Cauchy-Euler Equation SolverDocument9 paginiCauchy-Euler Equation SolverSanjar AbbasiÎncă nu există evaluări
- 1970 22erdosDocument14 pagini1970 22erdosvahid mesicÎncă nu există evaluări
- Fast Fourier Emulators Based On Space (Lling Lattices: R.A. Bates, E. Riccomagno, R. Schwabe and H.P. WynnDocument6 paginiFast Fourier Emulators Based On Space (Lling Lattices: R.A. Bates, E. Riccomagno, R. Schwabe and H.P. WynnEva RiccomagnoÎncă nu există evaluări
- GATE Vector Integration Study Material in PDFDocument12 paginiGATE Vector Integration Study Material in PDFcezanenielÎncă nu există evaluări
- BLConjDocument6 paginiBLConjPentti HaukkanenÎncă nu există evaluări
- 1971 04erdosDocument15 pagini1971 04erdosVAHID VAHIDÎncă nu există evaluări
- TriangleDocument6 paginiTrianglePardeep SinghÎncă nu există evaluări
- Z-Transform - Practice Sheet 01Document4 paginiZ-Transform - Practice Sheet 01divyanshunoone7Încă nu există evaluări
- Inverse Z-Transform Using Partial FractionsDocument10 paginiInverse Z-Transform Using Partial FractionsVaggelis TsirkasÎncă nu există evaluări
- Computation of Fractional Derivatives of Analytic Functions: Bengt Fornberg Cécile PiretDocument23 paginiComputation of Fractional Derivatives of Analytic Functions: Bengt Fornberg Cécile PiretYousef AlamriÎncă nu există evaluări
- 337D Differential GeometryDocument6 pagini337D Differential Geometryrcindia1Încă nu există evaluări
- Each Problem Is Worth 5 Points: NO Partial Credit Will Be Given. The Use of A Calculator Is ProhibitedDocument8 paginiEach Problem Is Worth 5 Points: NO Partial Credit Will Be Given. The Use of A Calculator Is ProhibitedNoor FarhanÎncă nu există evaluări
- Turunan Rumus Buku JacksonDocument11 paginiTurunan Rumus Buku JacksonlennyÎncă nu există evaluări
- Floyd Warshall Algorithm (Python) - Dynamic Programming - FavTutorDocument4 paginiFloyd Warshall Algorithm (Python) - Dynamic Programming - FavTutorAnu VarshiniÎncă nu există evaluări
- 3-06f-a4Document4 pagini3-06f-a4ABC CheckÎncă nu există evaluări
- Help MSADocument34 paginiHelp MSAGiomar OzaitaÎncă nu există evaluări
- MATH SL INTEGRALS TEST (WITH GDCDocument2 paginiMATH SL INTEGRALS TEST (WITH GDCuwu100% (1)
- H2 Mathematics Cheat Sheet by Sean LimDocument27 paginiH2 Mathematics Cheat Sheet by Sean LimGale HawthorneÎncă nu există evaluări
- Solutions To Tutorial 5 (Week 6) : Lecturers: Daniel Daners and James ParkinsonDocument12 paginiSolutions To Tutorial 5 (Week 6) : Lecturers: Daniel Daners and James ParkinsonTOM DAVISÎncă nu există evaluări
- Tables of Weber Functions: Mathematical Tables, Vol. 1De la EverandTables of Weber Functions: Mathematical Tables, Vol. 1Încă nu există evaluări
- Hanneforth-Tree AutomataDocument15 paginiHanneforth-Tree Automatajzam1919Încă nu există evaluări
- Casio Edifice EQS 500 - qw5123Document4 paginiCasio Edifice EQS 500 - qw5123jekulÎncă nu există evaluări
- Fahrenberg-Weighted AutomataDocument9 paginiFahrenberg-Weighted Automatajzam1919Încă nu există evaluări
- MINIMISING MULTIPLICITY TREE AUTOMATADocument25 paginiMINIMISING MULTIPLICITY TREE AUTOMATAjzam1919Încă nu există evaluări
- Schapira Elliptic PairsDocument94 paginiSchapira Elliptic Pairsjzam1919Încă nu există evaluări
- Sowers-The Financial History of New York State From 1789 To 1912Document344 paginiSowers-The Financial History of New York State From 1789 To 1912jzam1919Încă nu există evaluări
- Gecseg Tree AutomataDocument250 paginiGecseg Tree Automatajzam1919Încă nu există evaluări
- Blackburn1990-Nominal Tense LogicDocument291 paginiBlackburn1990-Nominal Tense Logicjzam1919Încă nu există evaluări
- Tree Automata and GrammarsDocument80 paginiTree Automata and Grammarsjzam1919Încă nu există evaluări
- Casio Edifice EQS 500 - qw5123Document4 paginiCasio Edifice EQS 500 - qw5123jekulÎncă nu există evaluări
- QW 5123Document26 paginiQW 5123jzam1919Încă nu există evaluări
- GlossaryDocument4 paginiGlossaryjzam1919Încă nu există evaluări
- FF Ar 2001 001Document53 paginiFF Ar 2001 001jzam1919Încă nu există evaluări
- Transatlantic Trade and Investment Partnership Cross-Border Trade in Services Text Consolidation November 30, 2015Document12 paginiTransatlantic Trade and Investment Partnership Cross-Border Trade in Services Text Consolidation November 30, 2015Joop_nlÎncă nu există evaluări
- FF Ar 2005 001Document69 paginiFF Ar 2005 001jzam1919Încă nu există evaluări
- FF Ar 2015 AllDocument57 paginiFF Ar 2015 Alljzam1919Încă nu există evaluări
- Blackburn1990-Nominal Tense LogicDocument291 paginiBlackburn1990-Nominal Tense Logicjzam1919Încă nu există evaluări
- FF Ar 2014 AllDocument98 paginiFF Ar 2014 Alljzam1919Încă nu există evaluări
- FF Ar 2003 001Document66 paginiFF Ar 2003 001jzam1919Încă nu există evaluări
- FF Ar 2012 AllDocument144 paginiFF Ar 2012 Alljzam1919Încă nu există evaluări
- FF Ar 2003 001Document66 paginiFF Ar 2003 001jzam1919Încă nu există evaluări
- FF Ar 2015 AllDocument57 paginiFF Ar 2015 Alljzam1919Încă nu există evaluări
- Gasmi Cost Proxy ModelsDocument318 paginiGasmi Cost Proxy Modelsjzam1919Încă nu există evaluări
- BOOX M96 Users Manual V1.6 EnglishDocument52 paginiBOOX M96 Users Manual V1.6 EnglishLuK3Încă nu există evaluări
- Reed-Total Quality Management and Sustainable Competitive Advantage PDFDocument22 paginiReed-Total Quality Management and Sustainable Competitive Advantage PDFjzam1919Încă nu există evaluări
- La Kabylie Et Les Coutumes Kabyles 1/3, Par Hanoteau Et Letourneux, 1893Document607 paginiLa Kabylie Et Les Coutumes Kabyles 1/3, Par Hanoteau Et Letourneux, 1893Tamkaṛḍit - la Bibliothèque amazighe (berbère) internationale100% (3)
- Noneuclidean GeometryDocument282 paginiNoneuclidean Geometryjzam1919Încă nu există evaluări
- Brunnow Spherical AstronomyDocument597 paginiBrunnow Spherical Astronomyjzam1919Încă nu există evaluări
- Dajani Ergodic TheoryDocument145 paginiDajani Ergodic Theoryjzam1919Încă nu există evaluări
- Datasheet-Pallet Scanning SystemDocument3 paginiDatasheet-Pallet Scanning SystemSergio Tarancón GabásÎncă nu există evaluări
- Valvulas MotorizadasDocument3 paginiValvulas MotorizadasvicmanolÎncă nu există evaluări
- Samson and Delilah (1609-1610) by Peter Paul RubensDocument10 paginiSamson and Delilah (1609-1610) by Peter Paul RubensIoanaMirunaÎncă nu există evaluări
- SankarDocument8 paginiSankarkarteek143Încă nu există evaluări
- Evangeline Henry Wadsworth Longfellow PDFDocument2 paginiEvangeline Henry Wadsworth Longfellow PDFPatrickÎncă nu există evaluări
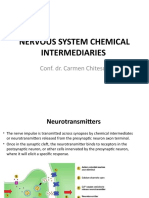
- NERVOUS SYSTEM CHEMICAL INTERMEDIARIESDocument40 paginiNERVOUS SYSTEM CHEMICAL INTERMEDIARIESPopa NicuÎncă nu există evaluări
- Crosswind Calculations Made EasyDocument2 paginiCrosswind Calculations Made EasyGede NandaÎncă nu există evaluări
- Mapping Your Future: A Guide to Geodetic EngineeringDocument4 paginiMapping Your Future: A Guide to Geodetic EngineeringGear Arellano IIÎncă nu există evaluări
- Ciptonugroho 2016Document13 paginiCiptonugroho 2016baizidiÎncă nu există evaluări
- Bizhub C360i C300i C250i SeriesDocument16 paginiBizhub C360i C300i C250i SeriesCCS HHYDÎncă nu există evaluări
- Ultrasonic CleaningDocument9 paginiUltrasonic Cleaningfgdgrte gdfsgdÎncă nu există evaluări
- 40k Rogue Trader VehiclesDocument12 pagini40k Rogue Trader VehiclesLewis Holloway100% (2)
- Storage Tanks Basic TrainingDocument97 paginiStorage Tanks Basic Traininganouar82100% (8)
- DplynetDocument312 paginiDplynetPhạm TuânÎncă nu există evaluări
- 00 EAN Abstract 2016 BookDocument956 pagini00 EAN Abstract 2016 BookAlexandra MardareÎncă nu există evaluări
- Deployment of A Self-Expanding Stent Inside An Artery (FEA)Document11 paginiDeployment of A Self-Expanding Stent Inside An Artery (FEA)LogicAndFacts ChannelÎncă nu există evaluări
- Diya CopDocument26 paginiDiya CopDebojit Koley DCE 8852Încă nu există evaluări
- Virtual Museums A Survey and Some IssuesDocument9 paginiVirtual Museums A Survey and Some IssuesCeaser SaidÎncă nu există evaluări
- Desert War Quick Start Guide-Printer FriendlyDocument22 paginiDesert War Quick Start Guide-Printer FriendlyŽeljko ToplekÎncă nu există evaluări
- Critical and major GMP inspection observationsDocument59 paginiCritical and major GMP inspection observationsMusab HashmiÎncă nu există evaluări
- Digging For DinosDocument7 paginiDigging For Dinosapi-645698424Încă nu există evaluări
- Carto 3 System OverviewDocument8 paginiCarto 3 System Overviewdanang setiawanÎncă nu există evaluări
- Python Bokeh Cheat Sheet PDFDocument1 paginăPython Bokeh Cheat Sheet PDFrakesharumallaÎncă nu există evaluări
- Heat Exchangers: DR Ali JawarnehDocument46 paginiHeat Exchangers: DR Ali Jawarnehprasanthi100% (1)
- Project Requisition Format - Graduation Project - PEOPLE 3Document2 paginiProject Requisition Format - Graduation Project - PEOPLE 3Jashid HameedÎncă nu există evaluări
- Echosounder Series HD370 380 390 ManualDocument54 paginiEchosounder Series HD370 380 390 Manuallo5tboy5Încă nu există evaluări
- CA Service Management - Service Desk ManagerDocument8 paginiCA Service Management - Service Desk ManagerSteep BesoinÎncă nu există evaluări
- Practice Set 4 DEM GSCM 2022Document6 paginiPractice Set 4 DEM GSCM 2022Romit BanerjeeÎncă nu există evaluări
- MetalTek Where Used GuideDocument18 paginiMetalTek Where Used GuidekakaÎncă nu există evaluări
- Chassis Cab: Super DutyDocument17 paginiChassis Cab: Super DutyJoeÎncă nu există evaluări