S-ar putea să vă placă și
- Artigo Sobre CavitaçãoDocument8 paginiArtigo Sobre CavitaçãoVicente de CastroÎncă nu există evaluări
- Preprints201807 0548 v1Document12 paginiPreprints201807 0548 v1Naveen Prasad GopinathraoÎncă nu există evaluări
- Water Hammer Protection Self Controller Surge TankDocument16 paginiWater Hammer Protection Self Controller Surge TankxavierÎncă nu există evaluări
- CFD Modeling of Three-Phase Bubble Column: 2. Effect of Design ParametersDocument8 paginiCFD Modeling of Three-Phase Bubble Column: 2. Effect of Design ParametersNanda PaulÎncă nu există evaluări
- Artículo 1Document11 paginiArtículo 1valentinaÎncă nu există evaluări
- ch3 PDFDocument96 paginich3 PDFJuan Zamora100% (1)
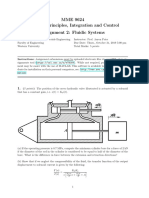
- MME 9624 Actuator Principles, Integration and Control Assignment 2: Fluidic SystemsDocument2 paginiMME 9624 Actuator Principles, Integration and Control Assignment 2: Fluidic SystemsKamal PatelÎncă nu există evaluări
- CFD Assignment May 2017Document2 paginiCFD Assignment May 2017蒲俊雄Încă nu există evaluări
- Modeling of Annular Prediffuser For Marine Gas Turbine Combustor Using CFD - A Study On The Effect of Strut ConfigurationDocument12 paginiModeling of Annular Prediffuser For Marine Gas Turbine Combustor Using CFD - A Study On The Effect of Strut Configurationrajarathnam.kÎncă nu există evaluări
- Numerical Estimation of Various Influence FactorsDocument9 paginiNumerical Estimation of Various Influence FactorsAJR365Încă nu există evaluări
- Numerical Analysis of Two-Phase Flow in The CavitaDocument23 paginiNumerical Analysis of Two-Phase Flow in The CavitaPato DuhaldeÎncă nu există evaluări
- Gradually Varied FlowDocument42 paginiGradually Varied FlowJuan Manuel Sanabria GuioÎncă nu există evaluări
- Dynamic Behaviour of Flow Through Multi-Stage Restricting OrificesDocument9 paginiDynamic Behaviour of Flow Through Multi-Stage Restricting OrificesAbbasÎncă nu există evaluări
- Modal Behavior of Dam Reservoir Foundati PDFDocument13 paginiModal Behavior of Dam Reservoir Foundati PDFdce_40Încă nu există evaluări
- Dispersed Two-Phase Flow in A Gas-Liquid Cylindrical Cyclone SeparatorDocument12 paginiDispersed Two-Phase Flow in A Gas-Liquid Cylindrical Cyclone SeparatorManivannanVenkatesanÎncă nu există evaluări
- Paper 027Document17 paginiPaper 027Rimika KÎncă nu există evaluări
- Compressible Flow (ME 254) : Lecture Notes OnDocument17 paginiCompressible Flow (ME 254) : Lecture Notes OnMoosa GhedanÎncă nu există evaluări
- Yaqub 2018 IOP Conf. Ser. Mater. Sci. Eng. 458 012078Document10 paginiYaqub 2018 IOP Conf. Ser. Mater. Sci. Eng. 458 012078Daniel MoraesÎncă nu există evaluări
- Study of A Tank-Pipe Damper System For Seismic Vibration Control of StructuresDocument10 paginiStudy of A Tank-Pipe Damper System For Seismic Vibration Control of StructuresDavid SantiagoÎncă nu există evaluări
- Lab 5 ReportDocument13 paginiLab 5 Reportapi-405394814Încă nu există evaluări
- A Mathematical Model For Study of Cyclic Purge in Vessels With Complex GeometryDocument16 paginiA Mathematical Model For Study of Cyclic Purge in Vessels With Complex Geometrypolaris44Încă nu există evaluări
- Major-Project-II ReportDocument22 paginiMajor-Project-II ReportPrerit RaiÎncă nu există evaluări
- Entropy Generation Analysis of Water Jet Pump Using Computational Fluid DynamicsDocument8 paginiEntropy Generation Analysis of Water Jet Pump Using Computational Fluid DynamicsEnrique FloresÎncă nu există evaluări
- Chemical Engineering Graduate Transport - HW 3Document3 paginiChemical Engineering Graduate Transport - HW 3Luthfir RahmanÎncă nu există evaluări
- France (1974)Document18 paginiFrance (1974)julianaÎncă nu există evaluări
- Effects of Air Entrainment On Fluid Transients in Pumping SystemsDocument7 paginiEffects of Air Entrainment On Fluid Transients in Pumping SystemsIjaz FazilÎncă nu există evaluări
- Mms MMHL FinalDocument4 paginiMms MMHL Finalapi-436858496Încă nu există evaluări
- Finite Difference Method of Modelling Groundwater FlowDocument7 paginiFinite Difference Method of Modelling Groundwater FlowVenegasÎncă nu există evaluări
- Accepted Manuscript: Chemical Engineering ScienceDocument36 paginiAccepted Manuscript: Chemical Engineering ScienceDiego JesusÎncă nu există evaluări
- CFD Application in Fixed Bed Reactor InternalsDocument22 paginiCFD Application in Fixed Bed Reactor InternalsSubhasish Mitra100% (2)
- Flow in 3D Packed Bed Reactors COMSOLDocument10 paginiFlow in 3D Packed Bed Reactors COMSOLBenedictEkowPrahÎncă nu există evaluări
- klwnyrWCEE2012 4870 PDFDocument10 paginiklwnyrWCEE2012 4870 PDF1man1bookÎncă nu există evaluări
- E Ects of Surface-Active Agents On Mass Transfer of A Solute Into Single Buoyancy Driven Drops in Solvent Extraction SystemsDocument14 paginiE Ects of Surface-Active Agents On Mass Transfer of A Solute Into Single Buoyancy Driven Drops in Solvent Extraction SystemsSahand NekoeianÎncă nu există evaluări
- Uemk 1522 Assignment Group 4Document16 paginiUemk 1522 Assignment Group 4守康Încă nu există evaluări
- Analisis Experimental TLDDocument6 paginiAnalisis Experimental TLDAlberto CornejoÎncă nu există evaluări
- Study of A Tank-Pipe Damper System For SDocument10 paginiStudy of A Tank-Pipe Damper System For SkurniawanandreasÎncă nu există evaluări
- Loba To 2006Document4 paginiLoba To 2006usercmdmcÎncă nu există evaluări
- 395-Article Text-1557-1-10-20100603Document71 pagini395-Article Text-1557-1-10-20100603Fatin Al-Khuza'iÎncă nu există evaluări
- Paris ConferenceDocument6 paginiParis ConferenceDebayan BoseÎncă nu există evaluări
- System Hydraulics and Design: 3.1 Fundamentals of Liquid Pipeline HydraulicsDocument96 paginiSystem Hydraulics and Design: 3.1 Fundamentals of Liquid Pipeline Hydraulicsmeshack nyitiÎncă nu există evaluări
- PE Problems GuideDocument19 paginiPE Problems GuideNoe HerreraÎncă nu există evaluări
- 1998 - Koh - Fluid Structure Interaction Analysis of 3D Rectangular Tank by BE FEDocument16 pagini1998 - Koh - Fluid Structure Interaction Analysis of 3D Rectangular Tank by BE FEpouyaÎncă nu există evaluări
- Absid392 Study The Performance of Circular Clarifier in Existing Potable Water Treatment Plant by Using Computational Fluid DynamicsDocument19 paginiAbsid392 Study The Performance of Circular Clarifier in Existing Potable Water Treatment Plant by Using Computational Fluid Dynamicskivumbi AchileoÎncă nu există evaluări
- Ability of Single-Well Injection-Withdrawal Experiments To Estimate Ground Water VelocityDocument7 paginiAbility of Single-Well Injection-Withdrawal Experiments To Estimate Ground Water Velocityiky77Încă nu există evaluări
- Mass Transfer and Diffusion CoefficientDocument7 paginiMass Transfer and Diffusion CoefficientSiraj AL sharifÎncă nu există evaluări
- Theory of Groundwater FlowDocument33 paginiTheory of Groundwater FlowSudharsananPRSÎncă nu există evaluări
- Grid Resolution PaperDocument6 paginiGrid Resolution Paperhitokiri_01Încă nu există evaluări
- Modeling and Simulation of Fixed Bed Adsorption Column: Effect of Velocity VariationDocument15 paginiModeling and Simulation of Fixed Bed Adsorption Column: Effect of Velocity VariationemebusamuelÎncă nu există evaluări
- 1757-482x 2 1 33 PDFDocument13 pagini1757-482x 2 1 33 PDFalexÎncă nu există evaluări
- CFD Simulations of A Bubble Column With and Without Internals by Using OpenFOAMDocument18 paginiCFD Simulations of A Bubble Column With and Without Internals by Using OpenFOAMvishalÎncă nu există evaluări
- Computational Uid Dynamics in Wastewater TreatmentDocument5 paginiComputational Uid Dynamics in Wastewater TreatmentMahletmelakuÎncă nu există evaluări
- CFD Simulation of Hydraulic Tank: SciencedirectDocument6 paginiCFD Simulation of Hydraulic Tank: SciencedirectCristian Camilo Aguirre MarquezÎncă nu există evaluări
- Application of CFD To Find The Dispersion of Contaminants inDocument13 paginiApplication of CFD To Find The Dispersion of Contaminants inEjaz KÎncă nu există evaluări
- Combined Simulation-Optimization of An Excavation Site For Dewatering PurposeDocument8 paginiCombined Simulation-Optimization of An Excavation Site For Dewatering Purposehram_phdÎncă nu există evaluări
- Numerical Analysis of Free Flow Past A Sluice GateDocument6 paginiNumerical Analysis of Free Flow Past A Sluice GateBabak mahmoudiÎncă nu există evaluări
- Mathematical Modeling of Two Tank System Ijariie4840Document8 paginiMathematical Modeling of Two Tank System Ijariie4840Abeng YogtaÎncă nu există evaluări
- Hydrothermal Analysis in Engineering Using Control Volume Finite Element MethodDe la EverandHydrothermal Analysis in Engineering Using Control Volume Finite Element MethodÎncă nu există evaluări
- Mathematical Aspects of Subsonic and Transonic Gas DynamicsDe la EverandMathematical Aspects of Subsonic and Transonic Gas DynamicsEvaluare: 5 din 5 stele5/5 (2)
- Flows and Chemical Reactions in Heterogeneous MixturesDe la EverandFlows and Chemical Reactions in Heterogeneous MixturesÎncă nu există evaluări
- 8 - Direct Torque and Flux ControlDocument21 pagini8 - Direct Torque and Flux ControlQuynh tranÎncă nu există evaluări
- Assignment (Spo and Other Equipment)Document1 paginăAssignment (Spo and Other Equipment)fherrera_80972Încă nu există evaluări
- Domingues - Education For Chemical Engineers PDFDocument6 paginiDomingues - Education For Chemical Engineers PDFfherrera_80972Încă nu există evaluări
- Towards Miniaturization of A MEMS-Based Wearable Motion Capture SystemDocument8 paginiTowards Miniaturization of A MEMS-Based Wearable Motion Capture Systemfherrera_80972Încă nu există evaluări
- Sect1 3 PDFDocument7 paginiSect1 3 PDFfherrera_80972Încă nu există evaluări
- Reaching Students What Research Says About Effective STEM Teaching 1Document6 paginiReaching Students What Research Says About Effective STEM Teaching 1fherrera_80972Încă nu există evaluări
- Domingues - Education For Chemical Engineers PDFDocument6 paginiDomingues - Education For Chemical Engineers PDFfherrera_80972Încă nu există evaluări
- CORREcted Model 4 Tanks!!!!!!!!!!Document6 paginiCORREcted Model 4 Tanks!!!!!!!!!!fherrera_80972Încă nu există evaluări
- P. 54-60 Reaching Students What Research Says About Effective STEM TeachingDocument7 paginiP. 54-60 Reaching Students What Research Says About Effective STEM Teachingfherrera_80972Încă nu există evaluări
- Daineko Et Al-2017-Computer Applications in Engineering EducationDocument9 paginiDaineko Et Al-2017-Computer Applications in Engineering Educationfherrera_80972Încă nu există evaluări
- Control Process Virtual LAboratoryDocument8 paginiControl Process Virtual LAboratoryfherrera_80972Încă nu există evaluări
- A Comparison of Controllers For The Quadruple Tank SystemDocument33 paginiA Comparison of Controllers For The Quadruple Tank Systemfherrera_80972Încă nu există evaluări
- PSIM User Manual PDFDocument216 paginiPSIM User Manual PDFfherrera_80972Încă nu există evaluări
- Atmel 0856 AVR Instruction Set ManualDocument152 paginiAtmel 0856 AVR Instruction Set ManualdarwinstonsÎncă nu există evaluări
- Simple Analytic Rules For Model Reduction and PID Tuning PDFDocument19 paginiSimple Analytic Rules For Model Reduction and PID Tuning PDFfherrera_80972Încă nu există evaluări
- (Carr D.M.) PID Control and Controller Tuning TechDocument11 pagini(Carr D.M.) PID Control and Controller Tuning Techfherrera_80972Încă nu există evaluări
- 8 - Direct Torque and Flux ControlDocument21 pagini8 - Direct Torque and Flux ControlQuynh tranÎncă nu există evaluări
- Four TanksDocument3 paginiFour Tanksfherrera_80972Încă nu există evaluări
- Model Based Control of A Four-Tank SystemDocument6 paginiModel Based Control of A Four-Tank Systemfherrera_80972Încă nu există evaluări
- Analizing Methods 4 TanksDocument14 paginiAnalizing Methods 4 Tanksfherrera_80972Încă nu există evaluări
- Atmel 8272 8 Bit AVR Microcontroller ATmega164A - PA 324A - PA 644A - PA 1284 - P - Datasheet PDFDocument586 paginiAtmel 8272 8 Bit AVR Microcontroller ATmega164A - PA 324A - PA 644A - PA 1284 - P - Datasheet PDFfherrera_80972Încă nu există evaluări
- Radio Ac DecayDocument34 paginiRadio Ac DecayQassem MohaidatÎncă nu există evaluări
- Control ValvesDocument95 paginiControl ValvesHardik Acharya100% (1)
- The University of The West Indies: Application For First Degree, Associate Degree, Diploma and Certificate ProgrammesDocument5 paginiThe University of The West Indies: Application For First Degree, Associate Degree, Diploma and Certificate ProgrammesDavid Adeyinka RamgobinÎncă nu există evaluări
- AYUMJADocument1 paginăAYUMJASoumet Das SoumetÎncă nu există evaluări
- Logistic RegressionDocument7 paginiLogistic RegressionShashank JainÎncă nu există evaluări
- Ilovepdf MergedDocument503 paginiIlovepdf MergedHemantÎncă nu există evaluări
- Digital Systems Project: IITB CPUDocument7 paginiDigital Systems Project: IITB CPUAnoushka DeyÎncă nu există evaluări
- Naval TV SystemDocument24 paginiNaval TV Systemsharmasandeep0010Încă nu există evaluări
- TTDM - JithinDocument24 paginiTTDM - JithinAditya jainÎncă nu există evaluări
- The Bio-Based Economy in The NetherlandsDocument12 paginiThe Bio-Based Economy in The NetherlandsIrving Toloache FloresÎncă nu există evaluări
- Hyundai SL760Document203 paginiHyundai SL760Anonymous yjK3peI7100% (3)
- SAMPLE MCQuestions ByTopicsDocument45 paginiSAMPLE MCQuestions ByTopicsVeeru ManikantaÎncă nu există evaluări
- DLP English 10 AIRADocument8 paginiDLP English 10 AIRAMae Mallapre100% (1)
- Abilash - Subramanian CV - 003 PDFDocument4 paginiAbilash - Subramanian CV - 003 PDFAbilash SubramanianÎncă nu există evaluări
- Table of Reinforcement Anchorage Length & Lap Length - Eurocode 2Document7 paginiTable of Reinforcement Anchorage Length & Lap Length - Eurocode 2NgJackyÎncă nu există evaluări
- Static Electrification: Standard Test Method ForDocument10 paginiStatic Electrification: Standard Test Method Forastewayb_964354182Încă nu există evaluări
- Blake Mouton Managerial GridDocument3 paginiBlake Mouton Managerial GridRashwanth Tc100% (1)
- English Test For Grade 7 (Term 2)Document6 paginiEnglish Test For Grade 7 (Term 2)UyenPhuonggÎncă nu există evaluări
- Fundasurv 215 Plate 1mDocument3 paginiFundasurv 215 Plate 1mKeith AtencioÎncă nu există evaluări
- ME-6501Computer Aided Design (CAD) WITH QB - BY Civildatas - Com 1Document85 paginiME-6501Computer Aided Design (CAD) WITH QB - BY Civildatas - Com 1Nathar ShaÎncă nu există evaluări
- (EN 10348) - Steel For The Reinforcement of Concrete. Galvanized Reinforcing SteelDocument24 pagini(EN 10348) - Steel For The Reinforcement of Concrete. Galvanized Reinforcing Steelbagusu_6Încă nu există evaluări
- Manhole Head LossesDocument11 paginiManhole Head Lossesjoseph_mscÎncă nu există evaluări
- TM Mic Opmaint EngDocument186 paginiTM Mic Opmaint Engkisedi2001100% (2)
- ISO Position ToleranceDocument15 paginiISO Position ToleranceНиколай КалугинÎncă nu există evaluări
- Diverging Lenses - Object-Image Relations: Previously in Lesson 5 Double Concave LensesDocument2 paginiDiverging Lenses - Object-Image Relations: Previously in Lesson 5 Double Concave LensesleonÎncă nu există evaluări
- Atomberg Gorilla FanDocument12 paginiAtomberg Gorilla FanjothamÎncă nu există evaluări
- Pam8610 PDFDocument15 paginiPam8610 PDFRaka Satria PradanaÎncă nu există evaluări
- Puma PypDocument20 paginiPuma PypPrashanshaBahetiÎncă nu există evaluări
- Anker Soundcore Mini, Super-Portable Bluetooth SpeakerDocument4 paginiAnker Soundcore Mini, Super-Portable Bluetooth SpeakerM.SaadÎncă nu există evaluări