S-ar putea să vă placă și
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5795)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1091)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Pinch, Sound StudiesDocument14 paginiPinch, Sound StudieshjhjhjhjhÎncă nu există evaluări
- Inspection and Test Plan For Storage TankDocument7 paginiInspection and Test Plan For Storage TankAhmed100% (5)
- Technical ManualDocument48 paginiTechnical ManualStewart BenÎncă nu există evaluări
- Machinist CatalogDocument24 paginiMachinist Catalogjchristoe2613100% (1)
- H-DC-0023 (AP) Economy Manual Dishwashing LiquidDocument1 paginăH-DC-0023 (AP) Economy Manual Dishwashing LiquidShiraz Khan83% (6)
- 1 a.PMMA Shiphandling and ManDocument373 pagini1 a.PMMA Shiphandling and ManTOtzkie Tapales Arpay100% (6)
- Dha BylawsDocument16 paginiDha BylawsNayab AhmedÎncă nu există evaluări
- Extended Aeration Treatment System 22Document13 paginiExtended Aeration Treatment System 22ashe zinab0% (1)
- Evo BSC 8200Document14 paginiEvo BSC 8200muhammadasifrashid78% (9)
- GeoPC Product Sheet KuwaitDocument9 paginiGeoPC Product Sheet KuwaitSyed AbudhakirÎncă nu există evaluări
- Arogya Premier Claim FormDocument7 paginiArogya Premier Claim FormSyed AbudhakirÎncă nu există evaluări
- Arogya Premier Policy WordingDocument30 paginiArogya Premier Policy WordingSyed AbudhakirÎncă nu există evaluări
- Arogya Premier Policy BrochureDocument8 paginiArogya Premier Policy BrochureSyed AbudhakirÎncă nu există evaluări
- 750 Joule Charpy Impact Testing MachineDocument1 pagină750 Joule Charpy Impact Testing MachineSyed AbudhakirÎncă nu există evaluări
- Aisi 304Document20 paginiAisi 304Syed AbudhakirÎncă nu există evaluări
- B16 36 Book PDFDocument13 paginiB16 36 Book PDFSyed AbudhakirÎncă nu există evaluări
- Jwe 1997PV PDFDocument1 paginăJwe 1997PV PDFSyed AbudhakirÎncă nu există evaluări
- A-80 RailrodDocument1 paginăA-80 RailrodSyed AbudhakirÎncă nu există evaluări
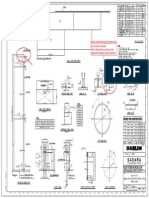
- Shows 12mm Fillet On Both Side of The Joint (Inside & Outside) - 12mm Fillet Weld On Out Side of The Angle (Shell Outside) Shall Be ClarifiedDocument1 paginăShows 12mm Fillet On Both Side of The Joint (Inside & Outside) - 12mm Fillet Weld On Out Side of The Angle (Shell Outside) Shall Be ClarifiedSyed AbudhakirÎncă nu există evaluări
- Bisley-Phosphonate-Dispersant-Plasticizer-TDS (1) پخش کننده و روان کننده فسفونات بیسلیDocument2 paginiBisley-Phosphonate-Dispersant-Plasticizer-TDS (1) پخش کننده و روان کننده فسفونات بیسلیrezaÎncă nu există evaluări
- Giaonx, Bai 24 - P27-28.5. Vinh-Dat Vuong-Revised-1Document9 paginiGiaonx, Bai 24 - P27-28.5. Vinh-Dat Vuong-Revised-1Phước Trương VĩnhÎncă nu există evaluări
- G 4, ApfcDocument23 paginiG 4, ApfcAwais Rehman KambohÎncă nu există evaluări
- Beteq2010 Part 1Document198 paginiBeteq2010 Part 1Zilmar JustiÎncă nu există evaluări
- Task 4 M5 LA3Document5 paginiTask 4 M5 LA3aristyÎncă nu există evaluări
- Manual Cutmaster 82Document84 paginiManual Cutmaster 82Ferley Cruz100% (1)
- Scoliosis BraceDocument8 paginiScoliosis BraceChandralina PakpahanÎncă nu există evaluări
- 2021 Product CatalogueDocument26 pagini2021 Product CatalogueJoseÎncă nu există evaluări
- Review of Plant Leaf Disease Detection Using Image ProcessingDocument5 paginiReview of Plant Leaf Disease Detection Using Image ProcessingInternational Journal of Application or Innovation in Engineering & Management100% (1)
- 20488B 00Document14 pagini20488B 00dentisyÎncă nu există evaluări
- Ep-15 CCTV, Telephone Fdas Riser DiagramDocument1 paginăEp-15 CCTV, Telephone Fdas Riser DiagramNyel ArmstrongÎncă nu există evaluări
- DDJ-RR Update Manual e PDFDocument8 paginiDDJ-RR Update Manual e PDFgusycaroÎncă nu există evaluări
- Math Samples PDFDocument1 paginăMath Samples PDFArwin VillegasÎncă nu există evaluări
- Dwyer 2300 250pa Pressure Gauge DatasheetDocument2 paginiDwyer 2300 250pa Pressure Gauge DatasheetGorch Marroko100% (1)
- User's Manual: FDC 4100 / 7100 / 8100 / 9100 Auto-Tune Fuzzy / PID Process / Temperature ControllerDocument60 paginiUser's Manual: FDC 4100 / 7100 / 8100 / 9100 Auto-Tune Fuzzy / PID Process / Temperature ControllerkmpoulosÎncă nu există evaluări
- Kuo H-H Et Al. INTERFERENCE-COLORED FINISHES FOR AUTOMOTIVE ALUMINUM ALLOYSDocument8 paginiKuo H-H Et Al. INTERFERENCE-COLORED FINISHES FOR AUTOMOTIVE ALUMINUM ALLOYSkaka**Încă nu există evaluări
- Introduction To PythonDocument0 paginiIntroduction To PythonLokesh BhatiaÎncă nu există evaluări
- Home Elevator SED200 SVB200Document5 paginiHome Elevator SED200 SVB200Trung Duy TrầnÎncă nu există evaluări
- Agilent Phase-Noise-Measurement TES-E5052B DatasheetDocument21 paginiAgilent Phase-Noise-Measurement TES-E5052B DatasheetTeq ShoÎncă nu există evaluări
- Sr. No. - 28 Ward No. - 24 PAINTING, ELECTRIFICATION & FURNITURE OF SIDDHARUTH MULTIPURPOSE HALLDocument13 paginiSr. No. - 28 Ward No. - 24 PAINTING, ELECTRIFICATION & FURNITURE OF SIDDHARUTH MULTIPURPOSE HALLnajuka ghodvindeÎncă nu există evaluări
- Module 3 - Loci of Points and Straight LinesDocument41 paginiModule 3 - Loci of Points and Straight LinesEngr Fazal Akbar100% (3)
- RC Square Pile Brochure 2022Document8 paginiRC Square Pile Brochure 2022k33_hon87Încă nu există evaluări