S-ar putea să vă placă și
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- ELE604 Student GuideDocument344 paginiELE604 Student GuideGoran MiljkovicÎncă nu există evaluări
- C S, A, W: ASE Tructures Rrays AveformsDocument13 paginiC S, A, W: ASE Tructures Rrays AveformsGoran MiljkovicÎncă nu există evaluări
- Lab Exercise 6: Ultrasonic Sensors: ME 3200 Mechatronics LaboratoryDocument5 paginiLab Exercise 6: Ultrasonic Sensors: ME 3200 Mechatronics LaboratoryXANPHOXYL KIBETÎncă nu există evaluări
- Lab04 - Sensors and Actuators: Exploration: BuzzerDocument6 paginiLab04 - Sensors and Actuators: Exploration: BuzzerGoran MiljkovicÎncă nu există evaluări
- S&A Optical Encoders PDFDocument34 paginiS&A Optical Encoders PDFNiravÎncă nu există evaluări
- Mechatronics II Laboratory: Experiment #1: Force and Torque SensorsDocument6 paginiMechatronics II Laboratory: Experiment #1: Force and Torque SensorsGoran MiljkovicÎncă nu există evaluări
- Development of A Simple Interactive Laboratory Exercise For Teaching The Principles of Velocity and Position EstimationDocument13 paginiDevelopment of A Simple Interactive Laboratory Exercise For Teaching The Principles of Velocity and Position EstimationGoran MiljkovicÎncă nu există evaluări
- Labview Fpga Based Noise Cancelling Using The Lms Adaptive AlgorithmDocument4 paginiLabview Fpga Based Noise Cancelling Using The Lms Adaptive AlgorithmGoran MiljkovicÎncă nu există evaluări
- Lab2 - Numbering SystemsDocument8 paginiLab2 - Numbering Systemswert1a2Încă nu există evaluări
- High Speed Multichannel Impedance Measuring System: Acta ImekoDocument6 paginiHigh Speed Multichannel Impedance Measuring System: Acta ImekoGoran MiljkovicÎncă nu există evaluări
- Sensors: A Self-Timed Multipurpose Delay Sensor For Field Programmable Gate Arrays (Fpgas)Document15 paginiSensors: A Self-Timed Multipurpose Delay Sensor For Field Programmable Gate Arrays (Fpgas)Goran MiljkovicÎncă nu există evaluări
- Lab1 111 PDFDocument16 paginiLab1 111 PDFGoran MiljkovicÎncă nu există evaluări
- Guia Desarrollo FPGA LabVIEW PDFDocument94 paginiGuia Desarrollo FPGA LabVIEW PDFBelen CastillonÎncă nu există evaluări
- Ordering Information: Related Products Related DocumentsDocument6 paginiOrdering Information: Related Products Related DocumentsGoran MiljkovicÎncă nu există evaluări
- Swarm IntelligenceDocument320 paginiSwarm Intelligencerohan_sh2003100% (3)
- Triaxis® Position Sensor: Product Code Temperature Code Package Code Option Code Packing Form CodeDocument48 paginiTriaxis® Position Sensor: Product Code Temperature Code Package Code Option Code Packing Form CodeGoran MiljkovicÎncă nu există evaluări
- Counteri NI Kartice PregledDocument1 paginăCounteri NI Kartice PregledGoran MiljkovicÎncă nu există evaluări
- 1392 1215 2006 03 67 36 PDFDocument6 pagini1392 1215 2006 03 67 36 PDFGoran MiljkovicÎncă nu există evaluări
- Digital Measurement of Frequency With Linear Interpolation in Dynamic StatesDocument4 paginiDigital Measurement of Frequency With Linear Interpolation in Dynamic StatesGoran MiljkovicÎncă nu există evaluări
- Linear Hall Effect Sensor Angle Measurement Theory, Implementation, and CalibrationDocument26 paginiLinear Hall Effect Sensor Angle Measurement Theory, Implementation, and CalibrationGoran MiljkovicÎncă nu există evaluări
- Period Measurement With A Counter: TutorialDocument2 paginiPeriod Measurement With A Counter: TutorialGoran MiljkovicÎncă nu există evaluări
- Teaching PID and Fuzzy Controllers Using LABVIEWDocument10 paginiTeaching PID and Fuzzy Controllers Using LABVIEWtamtamtoomÎncă nu există evaluări
- Period Measurement With A Counter: TutorialDocument2 paginiPeriod Measurement With A Counter: TutorialGoran MiljkovicÎncă nu există evaluări
- Quantization Noise Spectrum PDFDocument34 paginiQuantization Noise Spectrum PDFGoran MiljkovicÎncă nu există evaluări
- Modeling of Smart Integrated Sensors ofDocument2 paginiModeling of Smart Integrated Sensors ofGoran MiljkovicÎncă nu există evaluări
- Specialised Tachometric Measuring System On The Basis ofDocument7 paginiSpecialised Tachometric Measuring System On The Basis ofGoran MiljkovicÎncă nu există evaluări
- Towards Integration of Intelligent SensorsDocument5 paginiTowards Integration of Intelligent SensorsGoran MiljkovicÎncă nu există evaluări
- 06 Displacementvelocity PDFDocument103 pagini06 Displacementvelocity PDFGoran MiljkovicÎncă nu există evaluări
- Novel Rotation Speed Measurement Concept For ABS Appropriated For Microsystem CreationDocument7 paginiNovel Rotation Speed Measurement Concept For ABS Appropriated For Microsystem CreationGoran MiljkovicÎncă nu există evaluări
- Towards Integration of Intelligent SensorsDocument5 paginiTowards Integration of Intelligent SensorsGoran MiljkovicÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- DS-2CD2046G2-IU-C Datasheet V5.5.112 20220602Document5 paginiDS-2CD2046G2-IU-C Datasheet V5.5.112 20220602Anthony FernandezÎncă nu există evaluări
- Samsung NX Camera Settings Guide - Matt EvergladeDocument11 paginiSamsung NX Camera Settings Guide - Matt EvergladeVladan SutanovacÎncă nu există evaluări
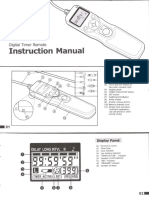
- EZa C3 Intervalometer Remote PDFDocument20 paginiEZa C3 Intervalometer Remote PDFphilsouthÎncă nu există evaluări
- Neteja Sensor. Pro - Kit - InstructionsDocument2 paginiNeteja Sensor. Pro - Kit - InstructionsJose Fernández GonzálezÎncă nu există evaluări
- x-h1 NFG Omw en S FDocument20 paginix-h1 NFG Omw en S FDavid BenazeraÎncă nu există evaluări
- Sony Dsr-pd175, Pd177, Pd198 Operating ManualDocument128 paginiSony Dsr-pd175, Pd177, Pd198 Operating ManualManojChakkambath100% (1)
- ApertureDocument7 paginiApertureRaiyah FarooqÎncă nu există evaluări
- Pentax Me Super MANUALDocument50 paginiPentax Me Super MANUALDominykas BorsakÎncă nu există evaluări
- Cpar ReviewerDocument6 paginiCpar Reviewersamantha CraigÎncă nu există evaluări
- Nikon Photographers Handbook 2016 Uk1129Document224 paginiNikon Photographers Handbook 2016 Uk1129iljan100% (2)
- P362Document2 paginiP362Lem MantillaÎncă nu există evaluări
- RE FLEX-KO R E LLE Chrom IIIDocument8 paginiRE FLEX-KO R E LLE Chrom IIIAndrei Posea100% (1)
- Photojournalism-Telling-Stories-With-Images Lesson-1Document19 paginiPhotojournalism-Telling-Stories-With-Images Lesson-1api-294176103Încă nu există evaluări
- Digital Photography Basics PDFDocument42 paginiDigital Photography Basics PDFnilanjan1969Încă nu există evaluări
- Konica Autoreflex TDocument40 paginiKonica Autoreflex TZerkaloSolarisÎncă nu există evaluări
- Advanced Photography Guide PDFDocument194 paginiAdvanced Photography Guide PDFTarif Hasan100% (9)
- Sanyo Xacti Camera User ManualDocument207 paginiSanyo Xacti Camera User ManualDeeÎncă nu există evaluări
- DSLR Photography Cookbook - Joshua HuntDocument38 paginiDSLR Photography Cookbook - Joshua HuntIonut MilitaruÎncă nu există evaluări
- How To Use The Canon Rebel SL2 - Tips, Tricks and Picture Settings - Tom's Guide PDFDocument8 paginiHow To Use The Canon Rebel SL2 - Tips, Tricks and Picture Settings - Tom's Guide PDFPalanisamy BalasubramaniÎncă nu există evaluări
- Pro Cam ManualDocument26 paginiPro Cam ManualchalimacÎncă nu există evaluări
- What Is Single Camera? (The Advantages and Disadvantages of Single Camera)Document23 paginiWhat Is Single Camera? (The Advantages and Disadvantages of Single Camera)tallulahÎncă nu există evaluări
- A6700 ManualDocument527 paginiA6700 ManualCamiloÎncă nu există evaluări
- Canon Ixus 265 HS ManualDocument163 paginiCanon Ixus 265 HS ManualMarcelo Peixoto Del PelosoÎncă nu există evaluări
- Panasonic DMC tz40 User ManualDocument36 paginiPanasonic DMC tz40 User ManualVladson De MirandaÎncă nu există evaluări
- High Speed Sync PresentationDocument20 paginiHigh Speed Sync Presentationcutepixel0716Încă nu există evaluări
- Visual Media - PhotographyDocument6 paginiVisual Media - PhotographyMary Dorothy Anne OmalÎncă nu există evaluări
- Fuji GS645 Service ManualDocument94 paginiFuji GS645 Service ManualJuan Angel Gonzalez Campos100% (1)
- Nikon SB-23 User ManualDocument42 paginiNikon SB-23 User ManualHamidEshaniÎncă nu există evaluări
- Nikon FM-2 Repair ManualDocument173 paginiNikon FM-2 Repair ManualAlexey StchegolevÎncă nu există evaluări
- Photography Masterclass Workbook PDFDocument273 paginiPhotography Masterclass Workbook PDFMahmoud Khairy100% (1)