S-ar putea să vă placă și
- NEP9801Document1 paginăNEP9801hoang van tuyenÎncă nu există evaluări
- Parameter Unit Value Min MaxDocument2 paginiParameter Unit Value Min MaxEngr Fahimuddin QureshiÎncă nu există evaluări
- Trackmaster TMX Field Service Manual Part 2Document78 paginiTrackmaster TMX Field Service Manual Part 2macrufoÎncă nu există evaluări
- LM555 Single Timer: Features DescriptionDocument14 paginiLM555 Single Timer: Features DescriptionDanilson GasparÎncă nu există evaluări
- 0 Off Off Off Slow 1 On Off Off Slow 2 On On Off Slow 3 On On On Slow 4 On On On FastDocument1 pagină0 Off Off Off Slow 1 On Off Off Slow 2 On On Off Slow 3 On On On Slow 4 On On On Fastsalinschi iulianÎncă nu există evaluări
- SIVDocument60 paginiSIVJitendra Kumar Karlapudi100% (2)
- SBBR Nirdi-1a-Rwy-11l Sid 20200423Document1 paginăSBBR Nirdi-1a-Rwy-11l Sid 20200423Calebe TavaresÎncă nu există evaluări
- Precision Timer: Connection DiagramDocument5 paginiPrecision Timer: Connection DiagramValentin RaduÎncă nu există evaluări
- Ie10 - Schema Tablou Electric Etaj 2.1 Intrare Principala - 15.06.2022Document1 paginăIe10 - Schema Tablou Electric Etaj 2.1 Intrare Principala - 15.06.2022Tudor AdremÎncă nu există evaluări
- Pages From vc34 Basic Function Diagrams PDFDocument1 paginăPages From vc34 Basic Function Diagrams PDFTC Tekin ErcanÎncă nu există evaluări
- 14 - Auxiliary Controller - Operation Manual - CATDocument20 pagini14 - Auxiliary Controller - Operation Manual - CATMiguel Angel RodriguezÎncă nu există evaluări
- SN54 74LS90Document6 paginiSN54 74LS90dhunter ZenfoneÎncă nu există evaluări
- UA555 FairchildSemiconductorDocument5 paginiUA555 FairchildSemiconductorOscar Caetano FontÎncă nu există evaluări
- SIV&FDCSDocument9 paginiSIV&FDCSvenkatanarasaiah50% (2)
- Beckwith 3425 Setting As On 12th Jan 2007Document9 paginiBeckwith 3425 Setting As On 12th Jan 2007rajewaran144Încă nu există evaluări
- HY510N HawYangDocument10 paginiHY510N HawYangacwindÎncă nu există evaluări
- LM555 PDFDocument12 paginiLM555 PDFKamila KÎncă nu există evaluări
- 2955 FaDocument22 pagini2955 Fajenny flyerÎncă nu există evaluări
- Ttp223-Ba6 C80757Document8 paginiTtp223-Ba6 C80757Sahar ShahidÎncă nu există evaluări
- Siemenss 7200 PLC 1Document26 paginiSiemenss 7200 PLC 1Handi KsciÎncă nu există evaluări
- Data Sheet: 偉詮電子股份有限公司 Weltrend Semiconductor, IncDocument11 paginiData Sheet: 偉詮電子股份有限公司 Weltrend Semiconductor, IncOk SyahÎncă nu există evaluări
- Design of Fixed-Off-Time Controlled PFC Pre-Regulators With The L6562Document31 paginiDesign of Fixed-Off-Time Controlled PFC Pre-Regulators With The L6562kamran moradiÎncă nu există evaluări
- 11 - Servo Controller - Operation Manual - CATDocument16 pagini11 - Servo Controller - Operation Manual - CATVladimir VeraÎncă nu există evaluări
- Belajar Siemens s7 200 PLCDocument26 paginiBelajar Siemens s7 200 PLCMochamad Effendi100% (1)
- Ade Mod1 - WordDocument15 paginiAde Mod1 - WordsupriyaÎncă nu există evaluări
- 11.0 - Servo Controller - Operation Manual - CATDocument16 pagini11.0 - Servo Controller - Operation Manual - CATMiguel Angel RodriguezÎncă nu există evaluări
- 45RELEDocument14 pagini45RELEAicky IkrackÎncă nu există evaluări
- Taffic Light Control System Using 8051Document10 paginiTaffic Light Control System Using 8051Navadeep MorapakulaÎncă nu există evaluări
- Alignment & AdjustmentDocument18 paginiAlignment & AdjustmentTony SalvianoÎncă nu există evaluări
- 3 Turbine GoverningDocument26 pagini3 Turbine Governingankita chauhanÎncă nu există evaluări
- DAB Design Using Scaling Laws (DAB工程设计)Document95 paginiDAB Design Using Scaling Laws (DAB工程设计)anadiogdÎncă nu există evaluări
- A3955slb TDocument13 paginiA3955slb TEngin UzunÎncă nu există evaluări
- R01 E Programacao Modulo PLC11-01Document36 paginiR01 E Programacao Modulo PLC11-01Fabio Passos GuimaraesÎncă nu există evaluări
- OnSemi The TL431 in The Control of Switching Power Supplies PDFDocument63 paginiOnSemi The TL431 in The Control of Switching Power Supplies PDFFernando BotteronÎncă nu există evaluări
- Ehc 500MWDocument26 paginiEhc 500MWRaja VigneshÎncă nu există evaluări
- 01-Jan-2020 Shift B Logbook Operator PakseDocument1 pagină01-Jan-2020 Shift B Logbook Operator PakseLove Buddha's WordsÎncă nu există evaluări
- 200mw Turb ProtDocument12 pagini200mw Turb Protanupraja100% (1)
- Data Sheet: Weltrend Semiconductor, IncDocument10 paginiData Sheet: Weltrend Semiconductor, IncaadÎncă nu există evaluări
- Buck/Boost Switch-Mode Regulator: FeaturesDocument30 paginiBuck/Boost Switch-Mode Regulator: FeaturesErasmo Franco SÎncă nu există evaluări
- Relay Setting Details of ZawarDocument87 paginiRelay Setting Details of ZawarAnonymous o7dre7C6Încă nu există evaluări
- 11 RelaysDocument42 pagini11 Relaysravimeetu1375888395% (19)
- Chap 1.2Document11 paginiChap 1.2DjokataÎncă nu există evaluări
- PLC Programming Ladder LogicDocument18 paginiPLC Programming Ladder LogicPackiyaraj BMSÎncă nu există evaluări
- 2 Datasheet Detector Tactil de Teclado TTP223Document9 pagini2 Datasheet Detector Tactil de Teclado TTP223Carlos Roman ZarzaÎncă nu există evaluări
- BL201801052 ZYT02 Timer ManualDocument2 paginiBL201801052 ZYT02 Timer ManualLu LuÎncă nu există evaluări
- Pinpoint Test C: DTCS P705, P706, P707, P708, P709, P1702, P1921 (Automatic Transaxle/transmission - 6R80)Document5 paginiPinpoint Test C: DTCS P705, P706, P707, P708, P709, P1702, P1921 (Automatic Transaxle/transmission - 6R80)lem abesamisÎncă nu există evaluări
- Data SheetDocument17 paginiData Sheetapi-3758989Încă nu există evaluări
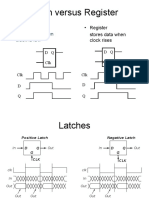
- Latch Versus Register: Latch Stores Data When Clock Is LowDocument23 paginiLatch Versus Register: Latch Stores Data When Clock Is LowSrikrishna JanaÎncă nu există evaluări
- Protection and Relaying Examples: Dharshana Muthumuni Manitoba HVDC Research CentreDocument24 paginiProtection and Relaying Examples: Dharshana Muthumuni Manitoba HVDC Research Centresandeep kumar mishraÎncă nu există evaluări
- 14-Jan-2021 Shift C Logbook Operator Pakse - 8-16Document1 pagină14-Jan-2021 Shift C Logbook Operator Pakse - 8-16Love Buddha's WordsÎncă nu există evaluări
- L10 Timers Amatrol LabDocument26 paginiL10 Timers Amatrol LabAndrew FischerÎncă nu există evaluări
- 欧宝锅炉 Mission 系统3Document334 pagini欧宝锅炉 Mission 系统3JUN ZHOUÎncă nu există evaluări
- Schematic Diagram: 1. ScalerDocument7 paginiSchematic Diagram: 1. ScalerMilan HouskaÎncă nu există evaluări
- Controller Setpoints at CommissioningDocument2 paginiController Setpoints at CommissioningNovan WPÎncă nu există evaluări
- Quick Reference: 45/545RFE Component Location and I.DDocument8 paginiQuick Reference: 45/545RFE Component Location and I.DAyhan ÜmitÎncă nu există evaluări
- Turbine Protection System Performs To Cover The Following FunctionsDocument14 paginiTurbine Protection System Performs To Cover The Following Functionssahutp100% (1)
- SIV Trouble-1 PDFDocument4 paginiSIV Trouble-1 PDFsatsanh_22100% (3)
- 03-July-2021 Shift B Logbook Operator PakseDocument1 pagină03-July-2021 Shift B Logbook Operator PakseLove Buddha's WordsÎncă nu există evaluări
- MC3403 Datasheet 4xOV741Document11 paginiMC3403 Datasheet 4xOV741algogeniusÎncă nu există evaluări
- HIJAMAHDocument9 paginiHIJAMAHshahg9948Încă nu există evaluări
- ABS Service BulletienDocument63 paginiABS Service Bulletienshahg9948Încă nu există evaluări
- Alternator InspectionDocument2 paginiAlternator Inspectionshahg9948Încă nu există evaluări
- Arabic Keyboard ShortcutsDocument1 paginăArabic Keyboard Shortcutssafofoh_100100% (2)
- AirConditioning Wiring DiagramsDocument1 paginăAirConditioning Wiring Diagramsshahg9948Încă nu există evaluări
- MMBZXXVXL, SZMMBZXXVXL Series Zener Diodes, 40 Watt Peak PowerDocument5 paginiMMBZXXVXL, SZMMBZXXVXL Series Zener Diodes, 40 Watt Peak Powershahg9948Încă nu există evaluări
- TL084 TL084A - TL084B: General Purpose Quad J-Fet Operational AmplifiersDocument10 paginiTL084 TL084A - TL084B: General Purpose Quad J-Fet Operational Amplifiersshahg9948Încă nu există evaluări
- rdg100 Seimens Datatsheet PDFDocument80 paginirdg100 Seimens Datatsheet PDFshahg9948Încă nu există evaluări
- rdg100 Seimens Datatsheet PDFDocument80 paginirdg100 Seimens Datatsheet PDFshahg9948Încă nu există evaluări
- RDG100-110 Operating InstructionsDocument2 paginiRDG100-110 Operating Instructionsshahg9948Încă nu există evaluări
- G-Scan User ManualDocument207 paginiG-Scan User Manualshahg9948Încă nu există evaluări
- Honey Well Thermostat T6865 MnaualDocument6 paginiHoney Well Thermostat T6865 Mnaualshahg9948100% (1)
- Simavi - Project Officer PROPOPIDocument4 paginiSimavi - Project Officer PROPOPIAgus NugrahaÎncă nu există evaluări
- 1.mukherjee - 2019 - SMM - Customers Passion For BrandsDocument14 pagini1.mukherjee - 2019 - SMM - Customers Passion For BrandsnadimÎncă nu există evaluări
- Allplan 2006 Engineering Tutorial PDFDocument374 paginiAllplan 2006 Engineering Tutorial PDFEvelin EsthefaniaÎncă nu există evaluări
- Manuscript - Batallantes &Lalong-Isip (2021) Research (Chapter 1 To Chapter 3)Document46 paginiManuscript - Batallantes &Lalong-Isip (2021) Research (Chapter 1 To Chapter 3)Franzis Jayke BatallantesÎncă nu există evaluări
- Bill Swad's Wealth Building Strategies - SwadDocument87 paginiBill Swad's Wealth Building Strategies - Swadjovetzky50% (2)
- Surface CareDocument18 paginiSurface CareChristi ThomasÎncă nu există evaluări
- Palm Manual EngDocument151 paginiPalm Manual EngwaterloveÎncă nu există evaluări
- Between:-Mr. Pedro Jose de Vasconcelos, of Address 14 CrombieDocument2 paginiBetween:-Mr. Pedro Jose de Vasconcelos, of Address 14 Crombiednd offiÎncă nu există evaluări
- Belimo Fire & Smoke Damper ActuatorsDocument16 paginiBelimo Fire & Smoke Damper ActuatorsSrikanth TagoreÎncă nu există evaluări
- BPL-DF 2617aedrDocument3 paginiBPL-DF 2617aedrBiomedical Incharge SRM TrichyÎncă nu există evaluări
- Validation of AnalyticalDocument307 paginiValidation of AnalyticalJagdish ChanderÎncă nu există evaluări
- SPC Abc Security Agrmnt PDFDocument6 paginiSPC Abc Security Agrmnt PDFChristian Comunity100% (3)
- Practitioners Guide For Business Development Planning in FPOsDocument70 paginiPractitioners Guide For Business Development Planning in FPOsMythreyi ChichulaÎncă nu există evaluări
- Sworn Statement of Assets, Liabilities and Net WorthDocument3 paginiSworn Statement of Assets, Liabilities and Net WorthShelby AntonioÎncă nu există evaluări
- Tate Modern London, Pay Congestion ChargeDocument6 paginiTate Modern London, Pay Congestion ChargeCongestionChargeÎncă nu există evaluări
- In Partial Fulfillment of The Requirements For The Award of The Degree ofDocument66 paginiIn Partial Fulfillment of The Requirements For The Award of The Degree ofcicil josyÎncă nu există evaluări
- 950 MW Coal Fired Power Plant DesignDocument78 pagini950 MW Coal Fired Power Plant DesignJohn Paul Coñge Ramos0% (1)
- Bank of AmericaDocument1 paginăBank of AmericaBethany MangahasÎncă nu există evaluări
- PHP IntroductionDocument113 paginiPHP Introductionds0909@gmailÎncă nu există evaluări
- Project Management: Chapter-2Document26 paginiProject Management: Chapter-2Juned BhavayaÎncă nu există evaluări
- Sciencedirect: Jad Imseitif, He Tang, Mike Smith Jad Imseitif, He Tang, Mike SmithDocument10 paginiSciencedirect: Jad Imseitif, He Tang, Mike Smith Jad Imseitif, He Tang, Mike SmithTushar singhÎncă nu există evaluări
- CNG Fabrication Certificate16217Document1 paginăCNG Fabrication Certificate16217pune2019officeÎncă nu există evaluări
- Residential BuildingDocument5 paginiResidential Buildingkamaldeep singhÎncă nu există evaluări
- Epenisa 2Document9 paginiEpenisa 2api-316852165100% (1)
- Braga - 2016 - On Standing's A Precariat Charter - Confronting The Precaritisation of Labour in Brazil and PortugalDocument12 paginiBraga - 2016 - On Standing's A Precariat Charter - Confronting The Precaritisation of Labour in Brazil and PortugalLiam MurciaÎncă nu există evaluări
- BSBOPS601 Develop Implement Business Plans - SDocument91 paginiBSBOPS601 Develop Implement Business Plans - SSudha BarahiÎncă nu există evaluări
- VoLTE KPI Performance - E2EDocument20 paginiVoLTE KPI Performance - E2EAnway Mohanty100% (1)
- Digital Documentation Class 10 NotesDocument8 paginiDigital Documentation Class 10 NotesRuby Khatoon86% (7)
- August 2015Document96 paginiAugust 2015Cleaner MagazineÎncă nu există evaluări
- Possession: I. A. Definition and Concept Civil Code Art. 523-530 CasesDocument7 paginiPossession: I. A. Definition and Concept Civil Code Art. 523-530 CasesPierrePrincipeÎncă nu există evaluări