S-ar putea să vă placă și
- Robotics Toolbox For MATLAB Rel6Document6 paginiRobotics Toolbox For MATLAB Rel6Eduardo RodríguezÎncă nu există evaluări
- BafaDocument87 paginiBafaJosue Munoz GuerraÎncă nu există evaluări
- Peter Corke Robotics Toolbox PythonDocument8 paginiPeter Corke Robotics Toolbox PythonAlexandre MarchioteÎncă nu există evaluări
- Simulation: 4.1 Introduction To MATLAB/SimulinkDocument11 paginiSimulation: 4.1 Introduction To MATLAB/SimulinkSaroj BabuÎncă nu există evaluări
- Neural Network PremDocument21 paginiNeural Network PremRaj SinghÎncă nu există evaluări
- Neural Network AbhishekDocument21 paginiNeural Network AbhishekRaj SinghÎncă nu există evaluări
- Aya Raied Assignment 2Document4 paginiAya Raied Assignment 2رمقالحياةÎncă nu există evaluări
- EL-422 Robotics (Revised-2022)Document106 paginiEL-422 Robotics (Revised-2022)Yusra KhanÎncă nu există evaluări
- Practical Lab File NNDocument31 paginiPractical Lab File NNYohgggshhÎncă nu există evaluări
- Simulation and Animation of Kinematic and Dynamic Machinery Systems With MATLABDocument4 paginiSimulation and Animation of Kinematic and Dynamic Machinery Systems With MATLABHariharanÎncă nu există evaluări
- Vibration Thesis Matlab CodeDocument6 paginiVibration Thesis Matlab Codemmwsmltgg100% (2)
- NEOM Lab Manual - Experiment 1 To 5Document46 paginiNEOM Lab Manual - Experiment 1 To 5prakashchittora6421Încă nu există evaluări
- Python Toolbox ICRA 2021Document7 paginiPython Toolbox ICRA 2021Nino QyÎncă nu există evaluări
- Certificate: Vaibhav Gaur, Students of Semester 4Document44 paginiCertificate: Vaibhav Gaur, Students of Semester 4Varun KadianÎncă nu există evaluări
- Integration of Matlab, Labview and Daq System For Bearing Vibration Signature AnalysisDocument4 paginiIntegration of Matlab, Labview and Daq System For Bearing Vibration Signature AnalysisCarlos Eduardo JaenÎncă nu există evaluări
- Introduction To MATLABDocument79 paginiIntroduction To MATLABPrasanna LakshmiÎncă nu există evaluări
- 1 Matlab Review: 2.1 Starting Matlab and Getting HelpDocument3 pagini1 Matlab Review: 2.1 Starting Matlab and Getting HelpSrinyta SiregarÎncă nu există evaluări
- MORLAB - A Model Order Reduction Framework in MATLAB and OctaveDocument10 paginiMORLAB - A Model Order Reduction Framework in MATLAB and OctaveKb NguyenÎncă nu există evaluări
- Final Project Report - Fanuc LR Mate 200cDocument12 paginiFinal Project Report - Fanuc LR Mate 200cMariane Carvalho100% (3)
- Theano: A CPU and GPU Math Compiler in PythonDocument7 paginiTheano: A CPU and GPU Math Compiler in PythonhachanÎncă nu există evaluări
- Car Suspension MathlabDocument8 paginiCar Suspension Mathlabavunnam100% (1)
- Matlab NotesDocument28 paginiMatlab Noteschandra sekharÎncă nu există evaluări
- Control System PRT FileDocument12 paginiControl System PRT Filegaming jerryÎncă nu există evaluări
- Robot Toolbox MATLABDocument93 paginiRobot Toolbox MATLABGradimirCucukovic100% (1)
- Emanuele FrontoniDocument36 paginiEmanuele FrontoniDon Vito AndoliniÎncă nu există evaluări
- Signals Aand Ssystems: With M Matlab Computing and Ssimulink ModelingDocument687 paginiSignals Aand Ssystems: With M Matlab Computing and Ssimulink Modelinganji.guvvalaÎncă nu există evaluări
- BS Lab 2021-22Document71 paginiBS Lab 2021-22jale charitha reddyÎncă nu există evaluări
- 08.508 DSP Lab Manual Part-BDocument124 pagini08.508 DSP Lab Manual Part-BAssini Hussain100% (2)
- Lab 1Document11 paginiLab 1Rigor RempilloÎncă nu există evaluări
- RobotDocument93 paginiRobotgeniusmexicanÎncă nu există evaluări
- KEC-453 S&S Lab ManualDocument44 paginiKEC-453 S&S Lab ManualSàyâñ KärÎncă nu există evaluări
- Communication PDFDocument85 paginiCommunication PDFAnonymous j2rSCfdMÎncă nu există evaluări
- Image ProcessingDocument36 paginiImage ProcessingTapasRoutÎncă nu există evaluări
- Matlab DSPDocument0 paginiMatlab DSPNaim Maktumbi NesaragiÎncă nu există evaluări
- Matlab Lab ManualDocument33 paginiMatlab Lab ManualDrKim J SeelanÎncă nu există evaluări
- NMM Chapter 3: Programming in Matlab: 10.10 Introduction To Chemical EngineeringDocument11 paginiNMM Chapter 3: Programming in Matlab: 10.10 Introduction To Chemical Engineeringnguyenvanthok19Încă nu există evaluări
- Position Control and Trajectory Tracking of The Stewart PlatformDocument25 paginiPosition Control and Trajectory Tracking of The Stewart PlatformDuskoÎncă nu există evaluări
- Introduction To MatlabDocument4 paginiIntroduction To MatlabM S VindhyaÎncă nu există evaluări
- Lab 03Document6 paginiLab 03Saad mubeenÎncă nu există evaluări
- Control Systems Lab 01Document11 paginiControl Systems Lab 01Shanawar AliÎncă nu există evaluări
- RoboticstoolboxcommandsDocument132 paginiRoboticstoolboxcommandsMichael OrtizÎncă nu există evaluări
- RobotDocument14 paginiRobotFranz Xavier Gonzalez AranibarÎncă nu există evaluări
- Introduction To Matlab Application To Electrical Engineering Part IDocument99 paginiIntroduction To Matlab Application To Electrical Engineering Part ITrương ĐứcÎncă nu există evaluări
- Python Advanced Programming: The Guide to Learn Python Programming. Reference with Exercises and Samples About Dynamical Programming, Multithreading, Multiprocessing, Debugging, Testing and MoreDe la EverandPython Advanced Programming: The Guide to Learn Python Programming. Reference with Exercises and Samples About Dynamical Programming, Multithreading, Multiprocessing, Debugging, Testing and MoreÎncă nu există evaluări
- Introduction To Matlab Application To Electrical Engineering Part IIDocument167 paginiIntroduction To Matlab Application To Electrical Engineering Part IITrương ĐứcÎncă nu există evaluări
- BSLAB MannualDocument114 paginiBSLAB MannualSrinivas SamalÎncă nu există evaluări
- Introduction To MATLAB: Yunkai Liu Assistant Professor Computer Science Department University of South DakotaDocument36 paginiIntroduction To MATLAB: Yunkai Liu Assistant Professor Computer Science Department University of South Dakotaunifim1102Încă nu există evaluări
- Robotics RV m1Document7 paginiRobotics RV m1Anonymous PfJgySfvÎncă nu există evaluări
- Training Workshop On MATLAB / Simulink: Ryan D. ReasDocument73 paginiTraining Workshop On MATLAB / Simulink: Ryan D. Reasryan reasÎncă nu există evaluări
- Introduction To MATLABDocument234 paginiIntroduction To MATLABShameer PhyÎncă nu există evaluări
- The Matlab Toolbox For Modeling Complex Mechanisms: I. PająkDocument17 paginiThe Matlab Toolbox For Modeling Complex Mechanisms: I. PająkDaniel SandriaÎncă nu există evaluări
- A Free MATLAB Alternative Called OctaveDocument6 paginiA Free MATLAB Alternative Called OctavemivanoÎncă nu există evaluări
- DSP Exp 1-2-3 - Antrikshpdf - RemovedDocument36 paginiDSP Exp 1-2-3 - Antrikshpdf - RemovedFraud StaanÎncă nu există evaluări
- Introduction To Matlab: 1.1 ObjectivesDocument7 paginiIntroduction To Matlab: 1.1 ObjectivesMaheswari SingarajÎncă nu există evaluări
- Lab Assignment #1Document4 paginiLab Assignment #1Miguel-Adrian NabatilanÎncă nu există evaluări
- CS Lab MannualDocument2 paginiCS Lab Mannualsoumyadeep chakrabortyÎncă nu există evaluări
- DSP Lab MannualDocument46 paginiDSP Lab MannualAniruddha RajshekarÎncă nu există evaluări
- Lab 1 Sample Report: Getting Acquainted With Matlab/SimulinkDocument5 paginiLab 1 Sample Report: Getting Acquainted With Matlab/Simulinksaikat ghoshÎncă nu există evaluări
- Essential MATLAB for Engineers and ScientistsDe la EverandEssential MATLAB for Engineers and ScientistsEvaluare: 2 din 5 stele2/5 (2)
- Guideswp Contentuploads20180829100056Three Dimensional Geometry PDFDocument3 paginiGuideswp Contentuploads20180829100056Three Dimensional Geometry PDFyogirajgolu242484Încă nu există evaluări
- Chapter 2Document10 paginiChapter 2abdul azizÎncă nu există evaluări
- Revision Notes For Class 11 Physics Motion in A Plane For NEETDocument17 paginiRevision Notes For Class 11 Physics Motion in A Plane For NEETElizabeth KhoiromÎncă nu există evaluări
- Engineering Mechanics Q BankDocument17 paginiEngineering Mechanics Q Bankshamil cmÎncă nu există evaluări
- Analiza MersuluiDocument31 paginiAnaliza MersuluiBeatrice AncaÎncă nu există evaluări
- Reading Motion MapsDocument3 paginiReading Motion MapsChrysler Hans GuttenbergÎncă nu există evaluări
- (Michael E Mortenson) Mathematics For Computer Gra PDFDocument368 pagini(Michael E Mortenson) Mathematics For Computer Gra PDFshaunakÎncă nu există evaluări
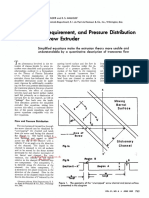
- Flow,: Power Requirement, and Pressure Distribution of Fluid in A Screw ExtruderDocument6 paginiFlow,: Power Requirement, and Pressure Distribution of Fluid in A Screw ExtruderLê Văn HòaÎncă nu există evaluări
- Review of Vector CalculusDocument53 paginiReview of Vector CalculusAhmed TayehÎncă nu există evaluări
- Characteristics of Strong-Motion EarthquakesDocument13 paginiCharacteristics of Strong-Motion EarthquakeselimosyÎncă nu există evaluări
- Vector Cheat Sheet in 2 SpaceDocument3 paginiVector Cheat Sheet in 2 SpaceM J RhoadesÎncă nu există evaluări
- UntitledDocument97 paginiUntitledRisan PaulÎncă nu există evaluări
- USAPhO SolutionsDocument26 paginiUSAPhO SolutionsPranav TejaÎncă nu există evaluări
- Solutions Manual Continuum Mechanics Lai 4th EdittionDocument246 paginiSolutions Manual Continuum Mechanics Lai 4th Edittiondiego_dave89% (18)
- Module 2 VectorsDocument16 paginiModule 2 VectorsKrizel CalasaraÎncă nu există evaluări
- EEE - 23 HW 1Document4 paginiEEE - 23 HW 1Carlo JimenezÎncă nu există evaluări
- Chapter 2 Solution - Matlab Programming With Applications For EngineersDocument7 paginiChapter 2 Solution - Matlab Programming With Applications For EngineersCarolMichalskiÎncă nu există evaluări
- HSC Model Test - 2022Document4 paginiHSC Model Test - 2022muktadir hosenÎncă nu există evaluări
- CE220 Reader For 2009Document677 paginiCE220 Reader For 2009Helen Wang100% (2)
- 1 PDFDocument29 pagini1 PDFAditya NemaÎncă nu există evaluări
- Computer Graphics VTUDocument50 paginiComputer Graphics VTUManju VinoÎncă nu există evaluări
- Week 1: Learning Activity 1 Short Quiz 1Document39 paginiWeek 1: Learning Activity 1 Short Quiz 1yagami100% (1)
- Fluid Ninja Live ManualDocument43 paginiFluid Ninja Live ManualCinehdv Mendoza100% (1)
- CH 8. Vector & 3-D (Math +2)Document66 paginiCH 8. Vector & 3-D (Math +2)Dinesh BabuÎncă nu există evaluări
- Module 2 - Electromagnetic WavesDocument17 paginiModule 2 - Electromagnetic WavesMahek KhushalaniÎncă nu există evaluări
- DemographyDocument46 paginiDemographyjorge reyesÎncă nu există evaluări
- C4真题 AL2014-17+GoldDocument93 paginiC4真题 AL2014-17+GoldQi HuangÎncă nu există evaluări
- Analysis of A Wind Turbine Blade Cross SectionDocument11 paginiAnalysis of A Wind Turbine Blade Cross Sectionkim seok jinÎncă nu există evaluări
- 1.3 Transformation of Stress TensorDocument7 pagini1.3 Transformation of Stress TensorGaneshÎncă nu există evaluări
- Mathematical Principles of Optical Fiber CommunicationsDocument104 paginiMathematical Principles of Optical Fiber CommunicationsJb MabÎncă nu există evaluări