S-ar putea să vă placă și
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- Arup Scheme Design Guide 2006Document139 paginiArup Scheme Design Guide 2006Boris Escubio100% (1)
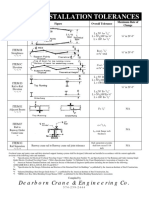
- Crane Runway Installation Tolerances-BechtelDocument1 paginăCrane Runway Installation Tolerances-BechtelRm1262Încă nu există evaluări
- Structural Scheme Design Guide by ArupDocument129 paginiStructural Scheme Design Guide by ArupNatalie Sullivan100% (15)
- The Concrete Society - Fire DamageDocument6 paginiThe Concrete Society - Fire DamageRm1262Încă nu există evaluări
- Henderson, Johnson & Wood 2002 Enhancing The Whole Life Structural Performance of Multi-Storey Car ParksDocument50 paginiHenderson, Johnson & Wood 2002 Enhancing The Whole Life Structural Performance of Multi-Storey Car ParksRm1262Încă nu există evaluări
- Cranerunwaybeams 4ed bk180 PDFDocument13 paginiCranerunwaybeams 4ed bk180 PDFMacÎncă nu există evaluări
- IELTS British Council UNEDITED PDFDocument119 paginiIELTS British Council UNEDITED PDFChristos VeisÎncă nu există evaluări
- Daily Lesson Plan in Practical Research 11Document2 paginiDaily Lesson Plan in Practical Research 11Mary Joy Lucob Tangbawan92% (12)
- STEEL CONFERENCE EXPANSION JOINTSDocument4 paginiSTEEL CONFERENCE EXPANSION JOINTSCharles Orebola OresanwoÎncă nu există evaluări
- African Feminist Studies Desiree LewisDocument138 paginiAfrican Feminist Studies Desiree LewisAYY100% (2)
- How Silos FailDocument14 paginiHow Silos FailMedhat Hasanain100% (2)
- Reinforcement of Concrete StructuresDocument13 paginiReinforcement of Concrete StructurestevredeÎncă nu există evaluări
- Russell PHD 2015 Progressive Collapse of Reinforced Concrete Flat Slab StructuresDocument238 paginiRussell PHD 2015 Progressive Collapse of Reinforced Concrete Flat Slab StructuresRm1262Încă nu există evaluări
- BK Series Kilcher Bearing StripsDocument6 paginiBK Series Kilcher Bearing Stripsforbeska100% (1)
- Ijsrp p46106 PDFDocument14 paginiIjsrp p46106 PDFKannan JaganÎncă nu există evaluări
- Electric Rolling Bridge, Scientific American 24 August 1889 p120Document2 paginiElectric Rolling Bridge, Scientific American 24 August 1889 p120Rm1262Încă nu există evaluări
- Annerel & Taerwe 2008 Diagnosis of The State of Concrete Structures After FireDocument6 paginiAnnerel & Taerwe 2008 Diagnosis of The State of Concrete Structures After FireRm1262Încă nu există evaluări
- ADA441347Document17 paginiADA441347habibur Rahman KhanÎncă nu există evaluări
- Technoslide Elastomeric-Plain-Sliding-Bearings-For-Bridges-Structures-BrochureDocument13 paginiTechnoslide Elastomeric-Plain-Sliding-Bearings-For-Bridges-Structures-BrochureRm1262Încă nu există evaluări
- Extend Abstract - 67792 - Joao GeadaDocument10 paginiExtend Abstract - 67792 - Joao GeadaRm1262Încă nu există evaluări
- Retrofitting and Rehabilitation of Fire PDFDocument134 paginiRetrofitting and Rehabilitation of Fire PDFVarun TyagiÎncă nu există evaluări
- Annerel & Taerwe 2008 Diagnosis of The State of Concrete Structures After FireDocument6 paginiAnnerel & Taerwe 2008 Diagnosis of The State of Concrete Structures After FireRm1262Încă nu există evaluări
- Mera DilDocument12 paginiMera DilIqbal AhmadÎncă nu există evaluări
- Exhibit 5f - Concept - Design - Submission 100-119Document20 paginiExhibit 5f - Concept - Design - Submission 100-119NasserZakiÎncă nu există evaluări
- UJ Postgraduate Engineering ManagementDocument4 paginiUJ Postgraduate Engineering ManagementRm12620% (1)
- Arup DesignYearbook 2010Document39 paginiArup DesignYearbook 2010Si MonaÎncă nu există evaluări
- IMIESA April 2021Document60 paginiIMIESA April 2021Rm1262Încă nu există evaluări
- Swing Jib CranesDocument2 paginiSwing Jib CranesRm1262Încă nu există evaluări
- BinsDocument17 paginiBinsRm1262Încă nu există evaluări
- Narayangharh-Mugling HighwayDocument85 paginiNarayangharh-Mugling HighwayRm1262Încă nu există evaluări
- Guide To Lifting Equipment Testing Inspections 2015Document8 paginiGuide To Lifting Equipment Testing Inspections 2015Rm1262Încă nu există evaluări
- Flange BendingDocument2 paginiFlange BendingMotoro AkinwoleÎncă nu există evaluări
- A Challenge For Designers of Steel Silos PDFDocument6 paginiA Challenge For Designers of Steel Silos PDFRm1262Încă nu există evaluări
- LL D - RegulationsDocument7 paginiLL D - RegulationsA M GerardÎncă nu există evaluări
- Health challenges of low income elderly after urban resettlement in Phitsanulok, ThailandDocument21 paginiHealth challenges of low income elderly after urban resettlement in Phitsanulok, ThailandPaola Gerona CeriolaÎncă nu există evaluări
- Literature ReviewDocument12 paginiLiterature Reviewapi-679532352Încă nu există evaluări
- SIP Report FormatDocument11 paginiSIP Report Formatsanjeetmohanty9884Încă nu există evaluări
- 3517 HSE Risk KobyDocument6 pagini3517 HSE Risk Kobyprihartono_diasÎncă nu există evaluări
- MBTI Global Manual Tech Brief - IDNDocument10 paginiMBTI Global Manual Tech Brief - IDNyosuawÎncă nu există evaluări
- Violence Exposure Among Children With DisabilitiesDocument21 paginiViolence Exposure Among Children With DisabilitiesPawaniGuptaÎncă nu există evaluări
- Training Module Development For The Health Promotion of Older Persons in The PhilippinesDocument37 paginiTraining Module Development For The Health Promotion of Older Persons in The PhilippinesSherwin PazzibuganÎncă nu există evaluări
- Project Gabay-Salakay For Struggling Third Graders in ReadingDocument6 paginiProject Gabay-Salakay For Struggling Third Graders in ReadingPsychology and Education: A Multidisciplinary JournalÎncă nu există evaluări
- Overview of The Development and Mission Application of The Advanced Electric Propulsion System (AEPS)Document24 paginiOverview of The Development and Mission Application of The Advanced Electric Propulsion System (AEPS)SOURAV GHIMIREYÎncă nu există evaluări
- ECT PresentationDocument50 paginiECT PresentationIgnacioJoséCalderónPérezÎncă nu există evaluări
- Ethical Leadership and The Psychology of Decision Making PDFDocument2 paginiEthical Leadership and The Psychology of Decision Making PDFRobertÎncă nu există evaluări
- Powerpoint Math 10Document26 paginiPowerpoint Math 10nimfa c, hinacayÎncă nu există evaluări
- Investigating The Green Impact of Lean, Six Sigma and Lean Six Sigma - A Systematic Literature ReviewDocument26 paginiInvestigating The Green Impact of Lean, Six Sigma and Lean Six Sigma - A Systematic Literature ReviewAhmed HassanÎncă nu există evaluări
- Automatic Dismissal Alarm for Time AwarenessDocument54 paginiAutomatic Dismissal Alarm for Time AwarenessArnie John P. MendozaÎncă nu există evaluări
- Theoryand Paradigmin Social ResearchDocument18 paginiTheoryand Paradigmin Social ResearchZeline ZephyreÎncă nu există evaluări
- MonographDocument8 paginiMonographtaha shabanÎncă nu există evaluări
- Applied Behavior AnalysisDocument7 paginiApplied Behavior AnalysisduliniÎncă nu există evaluări
- Publications Dr. Julian M. Ortiz: Peer Reviewed ISI PublicationsDocument8 paginiPublications Dr. Julian M. Ortiz: Peer Reviewed ISI PublicationsMahdi Tukang BatuÎncă nu există evaluări
- Type I and Type II ErrorsDocument8 paginiType I and Type II ErrorsL'Homme Révolté100% (1)
- Mba Capstone ReportDocument11 paginiMba Capstone ReportKANCHAN DEVIÎncă nu există evaluări
- Abilene ParadoxDocument4 paginiAbilene ParadoxAmit IyerÎncă nu există evaluări
- What Is A Classification EssayDocument3 paginiWhat Is A Classification Essayzzcpllaeg100% (2)
- Going Chapter 4Document38 paginiGoing Chapter 4maricar's channelÎncă nu există evaluări
- Effectiveness of Training and Development On The Employees at Fisar LTDDocument9 paginiEffectiveness of Training and Development On The Employees at Fisar LTDInternational Journal of Innovative Science and Research TechnologyÎncă nu există evaluări
- SAS - Session - 16.0 Research 2Document3 paginiSAS - Session - 16.0 Research 2Angel Grace Palenso QuimzonÎncă nu există evaluări
- Tutorial Interpolation in QGISDocument3 paginiTutorial Interpolation in QGISMarcos José Falcão De Medeiros FilhoÎncă nu există evaluări