S-ar putea să vă placă și
- Programación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeDe la EverandProgramación de microcontroladores paso a paso: Ejemplos prácticos desarrollados en la nubeÎncă nu există evaluări
- Introducción Al Psoc5Lp: Teoría y aplicaciones prácticaDe la EverandIntroducción Al Psoc5Lp: Teoría y aplicaciones prácticaÎncă nu există evaluări
- P05 Programacion en MikroBasicDocument9 paginiP05 Programacion en MikroBasicRicardo NarvaezÎncă nu există evaluări
- Curso de Microcontroladores Pic18f4550Document69 paginiCurso de Microcontroladores Pic18f4550ingmontoya704754100% (2)
- Curso en C para Pic CcsDocument91 paginiCurso en C para Pic CcsLeonardo CorredorÎncă nu există evaluări
- Manual MikrocDocument131 paginiManual MikrocJUAR_22Încă nu există evaluări
- Introducción Al PIC SIMULATOR IDEDocument40 paginiIntroducción Al PIC SIMULATOR IDEOmar Muñoz100% (1)
- Tutorial Proton Parte 2Document10 paginiTutorial Proton Parte 2HectorLopezÎncă nu există evaluări
- CONTROL MOTOR PASO A PASODocument12 paginiCONTROL MOTOR PASO A PASOFé Gabriela100% (1)
- PARTE 5 - Tipos de Variables en ProtónDocument3 paginiPARTE 5 - Tipos de Variables en ProtónEsteticoÎncă nu există evaluări
- Curso MikrobasicDocument9 paginiCurso MikrobasicEdson RodasÎncă nu există evaluări
- Proyectos Con PICsDocument8 paginiProyectos Con PICsArmando CajahuaringaÎncă nu există evaluări
- Pic18f2550 y UsbDocument77 paginiPic18f2550 y Usbxyberalez100% (2)
- Curso CX8-v6Document71 paginiCurso CX8-v6Sky BlackÎncă nu există evaluări
- P01 Modelo de Programación Del PIC18F4550Document14 paginiP01 Modelo de Programación Del PIC18F4550Fide Alvarado100% (1)
- Guía didáctica de aprendizaje para el desarrollo de aplicaciones con microcontroladores PIC de 8 bits usando la plataforma PIC DISCOVERYDocument82 paginiGuía didáctica de aprendizaje para el desarrollo de aplicaciones con microcontroladores PIC de 8 bits usando la plataforma PIC DISCOVERYgermanÎncă nu există evaluări
- El Módulo Adc de Los Avr PDFDocument27 paginiEl Módulo Adc de Los Avr PDFmi_papiÎncă nu există evaluări
- Introducción xc8Document12 paginiIntroducción xc8Samuel Jose Torres Casarrubia100% (1)
- La Bolsa y la Vida. 3ª Edición: Inversiones y títulos valoresDe la EverandLa Bolsa y la Vida. 3ª Edición: Inversiones y títulos valoresÎncă nu există evaluări
- Libro PICDocument469 paginiLibro PICLeonel GzzÎncă nu există evaluări
- LCD y GLCD Con Pic 16f877a (Informe 4)Document26 paginiLCD y GLCD Con Pic 16f877a (Informe 4)davicho47100% (2)
- Curso básico de PIC 16F887Document171 paginiCurso básico de PIC 16F887Ernesto NetoÎncă nu există evaluări
- Guía introductoria del microcontrolador 68HC11Document99 paginiGuía introductoria del microcontrolador 68HC11Stephanie RodríguezÎncă nu există evaluări
- Introducción Pic18F4550Document13 paginiIntroducción Pic18F4550Lázaro López PuenteÎncă nu există evaluări
- P02 Puerto Serial RS232 AVRDocument3 paginiP02 Puerto Serial RS232 AVRxoroger100% (1)
- Microcode Studio PlusDocument4 paginiMicrocode Studio Plusmd_corona62Încă nu există evaluări
- Conectando Un PIC Al Puerto Serie (RS232) - PROTONDocument8 paginiConectando Un PIC Al Puerto Serie (RS232) - PROTONEstetico100% (1)
- Libro Proyectos Pic BasicDocument12 paginiLibro Proyectos Pic BasicChristian AriasÎncă nu există evaluări
- P05 Programacion en MikroBasicDocument6 paginiP05 Programacion en MikroBasicJorge Luis Castillo GuarachiÎncă nu există evaluări
- PIC Con PIC Ide Simulator BasicDocument67 paginiPIC Con PIC Ide Simulator BasicAlexander Caceres67% (3)
- Libro 16F887Document114 paginiLibro 16F887Angel ToledoÎncă nu există evaluări
- PCB Diseño de Circuito Impreso Con PCB Wizard Guia de ConstruccionDocument3 paginiPCB Diseño de Circuito Impreso Con PCB Wizard Guia de ConstruccionFedericoAlbertoCastellanosTovarÎncă nu există evaluări
- Picbasic Manual EspañolDocument79 paginiPicbasic Manual EspañolAdriàn Garcìa FelicianoÎncă nu există evaluări
- Manual PIC 18F4550-1Document244 paginiManual PIC 18F4550-1Sandro Julián Panana EspinoÎncă nu există evaluări
- Microcontroladores PIC18F4550.Document15 paginiMicrocontroladores PIC18F4550.Gabriel Acevedo lopezÎncă nu există evaluări
- Microcontrolador PIC PDFDocument8 paginiMicrocontrolador PIC PDFRobertoGarciaÎncă nu există evaluări
- Manual de Practicas ATMega 8535Document61 paginiManual de Practicas ATMega 8535JUAN DIAZ MAMANIÎncă nu există evaluări
- ATtiny85 El Rey de Los Mini Proyectos Con Arduinoo - 330ohms PDFDocument4 paginiATtiny85 El Rey de Los Mini Proyectos Con Arduinoo - 330ohms PDFPaco AlemanyÎncă nu există evaluări
- Tutorial Protón IDEDocument6 paginiTutorial Protón IDEPablo BastidasÎncă nu există evaluări
- PP PLC 003 v1.0 PLC Mitsubishi - Programacion SFCDocument17 paginiPP PLC 003 v1.0 PLC Mitsubishi - Programacion SFCRicardo Pelao LetelierÎncă nu există evaluări
- Comunicación Serial ESP32Document7 paginiComunicación Serial ESP32Emanuel OlivarÎncă nu există evaluări
- Arquitectura de Los AvrDocument38 paginiArquitectura de Los AvrAldair FLÎncă nu există evaluări
- L11 12 Python ESP32 ThonnyDocument27 paginiL11 12 Python ESP32 Thonnydominic enco gonzalesÎncă nu există evaluări
- 3.manejo de GLCDDocument25 pagini3.manejo de GLCDJorge CorreaÎncă nu există evaluări
- 2.1 Protocolos de Comunicacion UARTDocument18 pagini2.1 Protocolos de Comunicacion UARTRafael HernandezÎncă nu există evaluări
- Tutorial Español de Mikro CDocument555 paginiTutorial Español de Mikro CJuan TenesacaÎncă nu există evaluări
- Medida distancias SRF04Document7 paginiMedida distancias SRF04ejoaomelchiorsÎncă nu există evaluări
- 09 Aprendiendoarduino - Wordpress.com-Motores ArduinoDocument24 pagini09 Aprendiendoarduino - Wordpress.com-Motores ArduinoFelipe FelipeÎncă nu există evaluări
- Stm32 f4 DiscoveryDocument3 paginiStm32 f4 DiscoveryJulioHuangaRÎncă nu există evaluări
- Pic16f877 3Document39 paginiPic16f877 3topotopoÎncă nu există evaluări
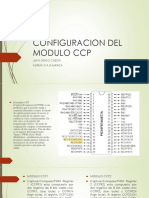
- Configuracion Del Modulo CCPDocument16 paginiConfiguracion Del Modulo CCPJuan Diego CuestaÎncă nu există evaluări
- MÓDULO CCP (CapturaDocument27 paginiMÓDULO CCP (CapturaVeruska San Miguel0% (1)
- Modulo CCPDocument20 paginiModulo CCPjesusdruizvÎncă nu există evaluări
- Contrato Los Ovnis ValidoDocument2 paginiContrato Los Ovnis Validovanesa gavilanezÎncă nu există evaluări
- Canciones MotricesDocument9 paginiCanciones MotricesGemma GargonÎncă nu există evaluări
- Secuencia 2 Fisica-1Document7 paginiSecuencia 2 Fisica-1Alejandro Mendieta TorresÎncă nu există evaluări
- Magnitud e IntensidadDocument29 paginiMagnitud e IntensidadJonathan AveigaÎncă nu există evaluări
- 118 - 1038 LreyDocument6 pagini118 - 1038 LreyChristopher HarrisÎncă nu există evaluări
- Informe 3 en Proceso.Document21 paginiInforme 3 en Proceso.mauricio luzaÎncă nu există evaluări
- Situaciones de AprendizajeDocument10 paginiSituaciones de AprendizajeSixto Carlos Orihuela FernandezÎncă nu există evaluări
- Poesía de la resistencia latinoamericanaDocument135 paginiPoesía de la resistencia latinoamericanaQUIMERA ESCOLARÎncă nu există evaluări
- PERLASDocument18 paginiPERLASYoel Arango AnyosaÎncă nu există evaluări
- Caso Practico - Reclutamiento y SeleccionDocument2 paginiCaso Practico - Reclutamiento y SeleccionHéctor Eduardo Ayosa LitanoÎncă nu există evaluări
- 07 - Guía de Ejercicios Elaboración de Tablas de FrecuenciaDocument8 pagini07 - Guía de Ejercicios Elaboración de Tablas de FrecuenciaConstanzaLealÎncă nu există evaluări
- Entrevista Abierta y CerradaDocument13 paginiEntrevista Abierta y CerradaalexandraÎncă nu există evaluări
- Guillermo Briones HipótesisDocument3 paginiGuillermo Briones HipótesisMailen MastrandreaÎncă nu există evaluări
- Tema, El BautismoDocument2 paginiTema, El BautismoCarlos Andres Cerpa GutierrezÎncă nu există evaluări
- Transformaciones lineales aplicadas en una estación de servicioDocument16 paginiTransformaciones lineales aplicadas en una estación de servicioKarlos PizarroÎncă nu există evaluări
- Material Estudio DianDocument9 paginiMaterial Estudio DianCarlos SarriaÎncă nu există evaluări
- Instalación solar fotovoltaica para bombeo de aguaDocument57 paginiInstalación solar fotovoltaica para bombeo de aguajavier100% (1)
- Ensayo ArgumentativoDocument8 paginiEnsayo ArgumentativoKarinaÎncă nu există evaluări
- Juegos Deportivos VóleibolDocument19 paginiJuegos Deportivos VóleibolCarlos SmithÎncă nu există evaluări
- Guia FluidoterapiaDocument19 paginiGuia FluidoterapiaLuis Enrique Ortega SalinasÎncă nu există evaluări
- Ondas en agua: efectos de obstáculosDocument6 paginiOndas en agua: efectos de obstáculosJuan EspinosaÎncă nu există evaluări
- Estadistica y Probabilidad Primer TallerDocument4 paginiEstadistica y Probabilidad Primer TallerCARLOS ARTURO BETANCUR VILLAMILÎncă nu există evaluări
- Semana 16Document9 paginiSemana 16IVAN MedinaÎncă nu există evaluări
- Psicología Evolutiva y Teorías Del Desarrollo HumanoDocument9 paginiPsicología Evolutiva y Teorías Del Desarrollo HumanoLaaura Giovanna100% (1)
- Luces Testigo Del Volkswagen Jetta - OpinautosDocument6 paginiLuces Testigo Del Volkswagen Jetta - OpinautosLaura Rivera EscalanteÎncă nu există evaluări
- Test Neuropsi normas ArgentinaDocument11 paginiTest Neuropsi normas ArgentinaJul ramÎncă nu există evaluări
- Sd. Abstinencia AlcoholicaDocument11 paginiSd. Abstinencia Alcoholicaresidencias2010Încă nu există evaluări
- ¿Cuáles Son Las Oportunidades para Emitir y Otorgar Comprobante de Pago Sin Cometer InfraccionDocument3 pagini¿Cuáles Son Las Oportunidades para Emitir y Otorgar Comprobante de Pago Sin Cometer InfraccionProgramas Sociales Del EstadoÎncă nu există evaluări
- Aplv MamaDocument4 paginiAplv MamaGerardo Andrés Arias AsenjoÎncă nu există evaluări
- Un Encuentro TransformadorDocument3 paginiUn Encuentro TransformadorHoracio GiraldoÎncă nu există evaluări