S-ar putea să vă placă și
- Observaciones de Hotel PichariDocument5 paginiObservaciones de Hotel PichariMisaicoSairitupacKevinÎncă nu există evaluări
- MC Edificico Multifamiliar SJLDocument21 paginiMC Edificico Multifamiliar SJLMisaicoSairitupacKevinÎncă nu există evaluări
- Distribucion Proyecto Fam - Misaico Au 001Document1 paginăDistribucion Proyecto Fam - Misaico Au 001MisaicoSairitupacKevinÎncă nu există evaluări
- Mercado SDocument1 paginăMercado SMisaicoSairitupacKevinÎncă nu există evaluări
- Matriz de RigidezDocument1 paginăMatriz de RigidezMisaicoSairitupacKevinÎncă nu există evaluări
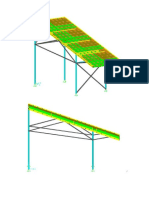
- Vistas ZarandaDocument3 paginiVistas ZarandaMisaicoSairitupacKevinÎncă nu există evaluări
- Fibra de CarbonoDocument1 paginăFibra de CarbonoMisaicoSairitupacKevinÎncă nu există evaluări
- TRACTO Volvo NL 400Document1 paginăTRACTO Volvo NL 400MisaicoSairitupacKevin100% (1)
- Diagrama de Fases-ECUACIONES DIFERENCIALESDocument1 paginăDiagrama de Fases-ECUACIONES DIFERENCIALESMisaicoSairitupacKevinÎncă nu există evaluări
- Seminario en Ing.Document9 paginiSeminario en Ing.MisaicoSairitupacKevinÎncă nu există evaluări
- Puente SDocument1 paginăPuente SMisaicoSairitupacKevinÎncă nu există evaluări
- Dimensionamiento de Elementos Estructurales - Ing Carlos IralaDocument15 paginiDimensionamiento de Elementos Estructurales - Ing Carlos IralaMisaicoSairitupacKevinÎncă nu există evaluări
- Concreto Cuevas UltimoDocument802 paginiConcreto Cuevas UltimoNorvin Martinez Rodriguez88% (8)
- ConcretoDocument1 paginăConcretoMisaicoSairitupacKevinÎncă nu există evaluări
- Dinamica Tarea3-Resumen NewmarkDocument5 paginiDinamica Tarea3-Resumen NewmarkMisaicoSairitupacKevinÎncă nu există evaluări
- Dinamica Tarea3-Resumen NewmarkDocument5 paginiDinamica Tarea3-Resumen NewmarkMisaicoSairitupacKevinÎncă nu există evaluări
- Espacios MetricosDocument1 paginăEspacios MetricosMisaicoSairitupacKevinÎncă nu există evaluări
- Problemas DinamicaDocument1 paginăProblemas DinamicaMisaicoSairitupacKevinÎncă nu există evaluări
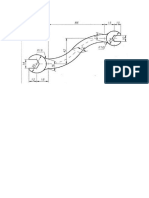
- Plano Mecanico LlaveDocument1 paginăPlano Mecanico LlaveMisaicoSairitupacKevinÎncă nu există evaluări
- T1 Intro No LinealDocument44 paginiT1 Intro No LinealRafael TriminioÎncă nu există evaluări
- Elementos Finitos 1DDocument10 paginiElementos Finitos 1DMisaicoSairitupacKevinÎncă nu există evaluări
- Ejercicio Torsion 01Document9 paginiEjercicio Torsion 01José Grimán MoralesÎncă nu există evaluări
- Elementos Finitos 1DDocument10 paginiElementos Finitos 1DMisaicoSairitupacKevinÎncă nu există evaluări
- Problema de Modos Torsionales en El Segundo ModoDocument2 paginiProblema de Modos Torsionales en El Segundo ModoMisaicoSairitupacKevinÎncă nu există evaluări
- Análisis no lineal de cables por grandes desplazamientosDocument15 paginiAnálisis no lineal de cables por grandes desplazamientosMisaicoSairitupacKevinÎncă nu există evaluări
- Dinamica Tarea3-Resumen NewmarkDocument5 paginiDinamica Tarea3-Resumen NewmarkMisaicoSairitupacKevinÎncă nu există evaluări
- Puente SDocument1 paginăPuente SMisaicoSairitupacKevinÎncă nu există evaluări
- Mensula ACI 318 11 P ParacasDocument2 paginiMensula ACI 318 11 P ParacasMisaicoSairitupacKevin100% (1)
- PROYECTO DE ESTRUCTURAS PlasticDocument64 paginiPROYECTO DE ESTRUCTURAS Plasticcesarioman100% (1)
- Extensión Forestal ParticipativaDocument49 paginiExtensión Forestal ParticipativaRubén Alejandro Alvarado Castillo60% (5)
- Cuales Eran Las Demandas de Los ZapatistasDocument1 paginăCuales Eran Las Demandas de Los ZapatistasMari Are50% (2)
- Dokumen - Tips Test de Razonamiento LogicoDocument18 paginiDokumen - Tips Test de Razonamiento LogicoJuan Luis Perez AvilaÎncă nu există evaluări
- Ticket Salida Funciones 1 B EMDocument2 paginiTicket Salida Funciones 1 B EMabel retamalÎncă nu există evaluări
- Revista Podologia 89Document32 paginiRevista Podologia 89bre100% (1)
- Anomalias MendelianasDocument62 paginiAnomalias MendelianasCUCBA Biologia89% (9)
- Diseño de engranajes helicoidales y cónicosDocument42 paginiDiseño de engranajes helicoidales y cónicosvictoryanezÎncă nu există evaluări
- Manual SHEDocument64 paginiManual SHEcarlosÎncă nu există evaluări
- Centrífuga de Tazón TubularDocument4 paginiCentrífuga de Tazón TubularLenix LennixÎncă nu există evaluări
- Taller 3 Fluidos PDFDocument9 paginiTaller 3 Fluidos PDFjesus david bermudez corredorÎncă nu există evaluări
- Caldo TioglicatoDocument3 paginiCaldo TioglicatoXimenaÎncă nu există evaluări
- Dilemas ÉticosDocument7 paginiDilemas Éticosfernando ruedaÎncă nu există evaluări
- Plan Estratégico Del Gobierno NacionalDocument4 paginiPlan Estratégico Del Gobierno NacionalJohnÎncă nu există evaluări
- Descarga de Torta de Lodos A Tolva de CamiónDocument3 paginiDescarga de Torta de Lodos A Tolva de CamiónVictor AntonioÎncă nu există evaluări
- Microcurriculum Administración en Salud Enviado Bogotá II-2019Document13 paginiMicrocurriculum Administración en Salud Enviado Bogotá II-2019sandra lilianaÎncă nu există evaluări
- Modelo de Memoria de Trabajo de Sporer y SchwandtDocument6 paginiModelo de Memoria de Trabajo de Sporer y SchwandtCarlos CaicedoÎncă nu există evaluări
- Dos Verdades Crudas Sobre El Medio AmbienteDocument2 paginiDos Verdades Crudas Sobre El Medio AmbientelilianettÎncă nu există evaluări
- Semilla en CerealesDocument31 paginiSemilla en CerealesMarcelo Peña AlcocerÎncă nu există evaluări
- Fisiología de La BocaDocument8 paginiFisiología de La BocaRaienari Atonaltzin50% (2)
- Semana 4 - Paradigmas y Practicas en Salud PublicaDocument23 paginiSemana 4 - Paradigmas y Practicas en Salud PublicaMicaa BelenÎncă nu există evaluări
- Geología y Génesis de Los Andes ColombianosDocument85 paginiGeología y Génesis de Los Andes ColombianosAngie Mile BelloÎncă nu există evaluări
- Sustentos MetodologicosDocument10 paginiSustentos MetodologicosLIZ velizÎncă nu există evaluări
- Necropolitica y Biopolitica PDFDocument35 paginiNecropolitica y Biopolitica PDFVeronica FerreiraÎncă nu există evaluări
- U6 S 5 MulticulturalismoDocument4 paginiU6 S 5 MulticulturalismoJenny TuyucÎncă nu există evaluări
- 03 Presión, Manometría y Estática de FluidosDocument4 pagini03 Presión, Manometría y Estática de FluidosRolando PinelÎncă nu există evaluări
- Practica Calificada Nro. 2-DINAMICADocument21 paginiPractica Calificada Nro. 2-DINAMICAFernando David Siles NatesÎncă nu există evaluări
- ¿Por Qué Las Mujeres Pueden Ponerse Ropa de Hombre Pero Los Hombres No Pueden Hacer Lo Mismo Sin Parecer Ridículos - QuoraDocument1 pagină¿Por Qué Las Mujeres Pueden Ponerse Ropa de Hombre Pero Los Hombres No Pueden Hacer Lo Mismo Sin Parecer Ridículos - QuoraMiguel GarciaÎncă nu există evaluări
- 3º Nota Aclaratoria Sobre La Instrucción de Servicio nº1-BT2003 Con Varias Aclaraciones en Referencia A La Tramitación de Instalaciones de BT en CLMDocument4 pagini3º Nota Aclaratoria Sobre La Instrucción de Servicio nº1-BT2003 Con Varias Aclaraciones en Referencia A La Tramitación de Instalaciones de BT en CLMvaleriaÎncă nu există evaluări
- Imperio de Los SentidosDocument7 paginiImperio de Los SentidosLuluLsclndÎncă nu există evaluări
- Cloruro de PotasioDocument6 paginiCloruro de PotasioJuan Esteban Garcia FernandezÎncă nu există evaluări