S-ar putea să vă placă și
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5795)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Prototyping Approach To Neuro-Fuzzy Speed Control of Trapezoidal Brushless DC MotorDocument6 paginiPrototyping Approach To Neuro-Fuzzy Speed Control of Trapezoidal Brushless DC MotorJournal of ComputingÎncă nu există evaluări
- Chapter 11Document12 paginiChapter 11JeromeÎncă nu există evaluări
- MathsDocument16 paginiMathsAmith LakshmanÎncă nu există evaluări
- AssessmentsDocument10 paginiAssessmentsapi-296561432Încă nu există evaluări
- I Wayan Agus Wirya Pratama - UjianWordDocument23 paginiI Wayan Agus Wirya Pratama - UjianWordUmiKulsumÎncă nu există evaluări
- Problem Set #5 Solutions: CopolymerizationDocument10 paginiProblem Set #5 Solutions: Copolymerizationmuzammil hussainÎncă nu există evaluări
- The Principles of CompositionDocument10 paginiThe Principles of CompositionTaka TomoÎncă nu există evaluări
- Anova 1Document11 paginiAnova 1vijay2101Încă nu există evaluări
- b7f1 PDFDocument9 paginib7f1 PDFmohamed hamedÎncă nu există evaluări
- Data Structures and Algorithms in Java 6th Edition 201 270Document70 paginiData Structures and Algorithms in Java 6th Edition 201 270longle18704Încă nu există evaluări
- SimuPlot5 ManualDocument25 paginiSimuPlot5 Manualikorishor ambaÎncă nu există evaluări
- Gann Time Price SquareDocument5 paginiGann Time Price Squareanudora0% (1)
- Volume and Surface AreaDocument18 paginiVolume and Surface AreaPrabhakar Chowdary ChintalaÎncă nu există evaluări
- Assignment PDFDocument2 paginiAssignment PDFMoazzam HussainÎncă nu există evaluări
- Axelrod SummaryDocument3 paginiAxelrod SummaryLuuk JanssenÎncă nu există evaluări
- Comparative Bio Mechanics of ThrowingsDocument25 paginiComparative Bio Mechanics of ThrowingsAttilio SacripantiÎncă nu există evaluări
- Math Demo PlanDocument3 paginiMath Demo PlanJudith Mondejar De MayoÎncă nu există evaluări
- Optimum Design PrinciplesDocument3 paginiOptimum Design PrinciplesJen Chavez100% (1)
- MATH101 Lecture1Document21 paginiMATH101 Lecture1Cristhian Aldana YarlequeÎncă nu există evaluări
- Measures of Dispersion: Greg C Elvers, PH.DDocument27 paginiMeasures of Dispersion: Greg C Elvers, PH.DorchuchiÎncă nu există evaluări
- R12 Oracle Hrms Implement and Use Fastformula: DurationDocument2 paginiR12 Oracle Hrms Implement and Use Fastformula: DurationAlochiousDassÎncă nu există evaluări
- Niterói, Volgograd and Trans-Tokyo Bay Steel Bridge Decks Abraham - Sanchez - Corriols - 2de2Document135 paginiNiterói, Volgograd and Trans-Tokyo Bay Steel Bridge Decks Abraham - Sanchez - Corriols - 2de2Miguel PerezÎncă nu există evaluări
- Sample 5th Grade Lesson PlanDocument2 paginiSample 5th Grade Lesson PlanJune Lee CamarinÎncă nu există evaluări
- Frequency Distribution Table GraphDocument10 paginiFrequency Distribution Table GraphHannah ArañaÎncă nu există evaluări
- An Introduction To Artificial Neural NetworkDocument5 paginiAn Introduction To Artificial Neural NetworkMajin BuuÎncă nu există evaluări
- Development of The 3rd Generation Balanced Scorecard - ParDocument11 paginiDevelopment of The 3rd Generation Balanced Scorecard - ParhshafeeqÎncă nu există evaluări
- How To Solve Fractions: Solving Quadratic EquationsDocument7 paginiHow To Solve Fractions: Solving Quadratic Equationsapi-126876773Încă nu există evaluări
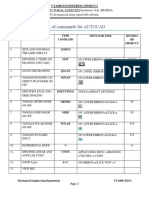
- List of Commands For Autocad: Cad Lab Tutorial Exercises Instructor: S.K. Sharma To Be Practiced Using Autocad SoftwareDocument15 paginiList of Commands For Autocad: Cad Lab Tutorial Exercises Instructor: S.K. Sharma To Be Practiced Using Autocad SoftwareShakeelÎncă nu există evaluări
- Finite Element Analysis of Hospital BEDDocument10 paginiFinite Element Analysis of Hospital BEDG SATHVIKÎncă nu există evaluări
- Linear and Nonlinear Propagation Characteristics of Multi-Gaussian Laser BeamsDocument11 paginiLinear and Nonlinear Propagation Characteristics of Multi-Gaussian Laser Beamsba mooÎncă nu există evaluări