S-ar putea să vă placă și
- Knowledge is "Real Power": Introduction to Power QualityDe la EverandKnowledge is "Real Power": Introduction to Power QualityÎncă nu există evaluări
- System Protection of The Nigerian Power System - Nsukka Town As Case StudyDocument19 paginiSystem Protection of The Nigerian Power System - Nsukka Town As Case Studyozoemena29Încă nu există evaluări
- EE296 Zafra HomeworkDocument62 paginiEE296 Zafra HomeworkPaolo Josemari ZafraÎncă nu există evaluări
- Unit 1 Ee2355 Machine DesignDocument21 paginiUnit 1 Ee2355 Machine DesignRamesh BabuÎncă nu există evaluări
- LED Lamp Dimmer CircuitDocument3 paginiLED Lamp Dimmer CircuitashishÎncă nu există evaluări
- Diploma ELECTRICAl 6th Sem SylDocument21 paginiDiploma ELECTRICAl 6th Sem SylAadil Ashraf KhanÎncă nu există evaluări
- Fdocuments - in Pscad-ModelingDocument21 paginiFdocuments - in Pscad-ModelingniteshÎncă nu există evaluări
- Power System Analysis Lab1-LEYBOLD EQUIPMENT INSPECTION & TRANSIENT MEASUREMENTDocument15 paginiPower System Analysis Lab1-LEYBOLD EQUIPMENT INSPECTION & TRANSIENT MEASUREMENTMalith DeemanthaÎncă nu există evaluări
- Star & Delta Star ReportDocument11 paginiStar & Delta Star ReportトシToshiÎncă nu există evaluări
- Open Ended LabsDocument13 paginiOpen Ended LabsMuhammad ImadÎncă nu există evaluări
- Electrical Engineering Laboratory V Course Code: Epo662: Simulation of Three-Phase Inverter With A PWM Control EPO662Document5 paginiElectrical Engineering Laboratory V Course Code: Epo662: Simulation of Three-Phase Inverter With A PWM Control EPO662Danial AkramÎncă nu există evaluări
- ML023030070 USNRC Power Plant Engineering 3Document170 paginiML023030070 USNRC Power Plant Engineering 3MutahirrasoolÎncă nu există evaluări
- Speed Control of Ac Motor Using TriacDocument2 paginiSpeed Control of Ac Motor Using TriacHarshaÎncă nu există evaluări
- Week 4Document39 paginiWeek 4EVTÎncă nu există evaluări
- Simulación de 21 y 87L Con SimulinkDocument72 paginiSimulación de 21 y 87L Con SimulinkLuis BriceñoÎncă nu există evaluări
- Arc Phenomena and Method of Arc Extinction in Air Circuit Breaker PDFDocument4 paginiArc Phenomena and Method of Arc Extinction in Air Circuit Breaker PDFHANRI ,Încă nu există evaluări
- Internship Report FOR AP GENCODocument65 paginiInternship Report FOR AP GENCORajesh KalyanamÎncă nu există evaluări
- Clean Energy Generation, Integration and Storage (Eee-801) : Dr. Abasin Ulasyar Assistant Professor (NUST USPCAS-E)Document12 paginiClean Energy Generation, Integration and Storage (Eee-801) : Dr. Abasin Ulasyar Assistant Professor (NUST USPCAS-E)Malik Shahzeb Ali0% (1)
- Compact NSX 100-630 A: User ManualDocument152 paginiCompact NSX 100-630 A: User ManualNuhadi Kusuma AdmajaÎncă nu există evaluări
- EE296 Selected Research Paper PresentationDocument30 paginiEE296 Selected Research Paper PresentationPaolo Josemari ZafraÎncă nu există evaluări
- Grid Code 2005 PDFDocument221 paginiGrid Code 2005 PDFskylarksÎncă nu există evaluări
- Illumination Design by ChrisDocument77 paginiIllumination Design by ChrisChristoper UrbanoÎncă nu există evaluări
- EE2022 Electrical Energy Systems: Lecture 15: Electric Power Distribution - Principle of Transformers 14-03-2013Document40 paginiEE2022 Electrical Energy Systems: Lecture 15: Electric Power Distribution - Principle of Transformers 14-03-2013Hamza AkçayÎncă nu există evaluări
- Harmonic Detection Using Microcontroller PDFDocument4 paginiHarmonic Detection Using Microcontroller PDFShri KulkarniÎncă nu există evaluări
- Chapter 5 AC ConverterDocument27 paginiChapter 5 AC ConverterArjun KumarÎncă nu există evaluări
- EE-455 Electrical PowerSystem Protection - F2013Document61 paginiEE-455 Electrical PowerSystem Protection - F2013Patel DipenÎncă nu există evaluări
- Electrical Engineering Engineering DC Machines and Synchronous Machines DC Motors NotesDocument33 paginiElectrical Engineering Engineering DC Machines and Synchronous Machines DC Motors NotesRalph Bernard Dela RosaÎncă nu există evaluări
- Module Information Module Title Electric Drives and Control Module Code MMD2511Document4 paginiModule Information Module Title Electric Drives and Control Module Code MMD2511Ashley KaÎncă nu există evaluări
- Simulation and Analysis of LLC Resonant Converter Using Closed Loop PI ControllerDocument3 paginiSimulation and Analysis of LLC Resonant Converter Using Closed Loop PI ControllerijaertÎncă nu există evaluări
- PQ Unit 1Document21 paginiPQ Unit 1Ezhiln 0328sÎncă nu există evaluări
- ATP Petersen Coil PracticalExerciseDocument33 paginiATP Petersen Coil PracticalExerciseGesiel SoaresÎncă nu există evaluări
- Electrical TechnologyDocument200 paginiElectrical Technologymjaji khulehÎncă nu există evaluări
- Communication Training ReportDocument33 paginiCommunication Training ReportkakagoÎncă nu există evaluări
- 2 ACTS12kPLUSDocument34 pagini2 ACTS12kPLUSPRBÎncă nu există evaluări
- Proteksi BusbarDocument30 paginiProteksi BusbarAdhyartha KerafÎncă nu există evaluări
- A2.24 Thermal PerformancesID55VER20Document15 paginiA2.24 Thermal PerformancesID55VER20Fajar Adi PrabowoÎncă nu există evaluări
- Chapter 3 Transformer Connections, Operation, and Specialty TransformersDocument38 paginiChapter 3 Transformer Connections, Operation, and Specialty TransformersSihamaSihamÎncă nu există evaluări
- 12EE2603 - Power Electronics: Department of Electrical and Electronics EngineeringDocument72 pagini12EE2603 - Power Electronics: Department of Electrical and Electronics EngineeringMurughesh MurughesanÎncă nu există evaluări
- 3 Phase Delta SystemDocument2 pagini3 Phase Delta SystemcbalavivekanandanÎncă nu există evaluări
- The New Law of Electrical Power FormationDocument37 paginiThe New Law of Electrical Power Formationdragon314159Încă nu există evaluări
- CRGO Material PropertyDocument3 paginiCRGO Material Propertypanditraghu100% (1)
- Transformer Vector GroupsDocument17 paginiTransformer Vector GroupsDheeraj YadavÎncă nu există evaluări
- Electric Power Systems Laboratory: Student ManualDocument74 paginiElectric Power Systems Laboratory: Student ManualVăn HảiÎncă nu există evaluări
- Speed Control of DC Motor Using TriacDocument13 paginiSpeed Control of DC Motor Using TriacRajesh Reddy KakarlaÎncă nu există evaluări
- DC Link CurrentDocument8 paginiDC Link CurrentsubbannaÎncă nu există evaluări
- DVM 1500 MDocument9 paginiDVM 1500 MHanif Rathore PrinceÎncă nu există evaluări
- Control CenterDocument19 paginiControl CenterJamier Chafloque SilvaÎncă nu există evaluări
- Lecture-4 Power Quality and HarmonicsDocument13 paginiLecture-4 Power Quality and HarmonicsjameelahmadÎncă nu există evaluări
- Eee 205-W1Document24 paginiEee 205-W1mahamudul hasan100% (1)
- Seminar On Ac - DC ConvertersDocument33 paginiSeminar On Ac - DC ConvertersrsbecoolÎncă nu există evaluări
- Emf Equation of AlternatorDocument2 paginiEmf Equation of AlternatorThe Engineers EDGE, CoimbatoreÎncă nu există evaluări
- EMDDocument23 paginiEMDPrakash ArumugamÎncă nu există evaluări
- Jvs Manual JRD 011Document5 paginiJvs Manual JRD 011ashutosh20090% (1)
- LAB 5A Single Phase Current Transformer PDFDocument6 paginiLAB 5A Single Phase Current Transformer PDFHumayun ArshadÎncă nu există evaluări
- Enerzio Product Catalog 2019-2020 New PDFDocument16 paginiEnerzio Product Catalog 2019-2020 New PDFHarvinder Singh HarryÎncă nu există evaluări
- (ACTA Universitatis Cibiniensis) Testing The Performance of A Single-Phase Autotransformer On MATLABSimulinkDocument6 pagini(ACTA Universitatis Cibiniensis) Testing The Performance of A Single-Phase Autotransformer On MATLABSimulinkbeimanalfredoÎncă nu există evaluări
- Transformer Solved Examples of Basic Electrical Eng by Nagrath and KothariDocument4 paginiTransformer Solved Examples of Basic Electrical Eng by Nagrath and KothariAnurag ZwÎncă nu există evaluări
- Delta-Star Transformer Connection Overview - EEPDocument4 paginiDelta-Star Transformer Connection Overview - EEPJhonci Cori100% (1)
- Case Study Failure of Boiler Feed Water Pump-ADocument13 paginiCase Study Failure of Boiler Feed Water Pump-Akirany58Încă nu există evaluări
- Generator Diesel Chicago Pneumatic CPSG 750Document2 paginiGenerator Diesel Chicago Pneumatic CPSG 750dicon100% (1)
- PSV Thermal SizingDocument16 paginiPSV Thermal Sizingahmad santoso0% (1)
- Double Class 1 LeverDocument4 paginiDouble Class 1 Levernurlisa khaleedaÎncă nu există evaluări
- qr25 Service ManualDocument38 paginiqr25 Service ManualAUDRANÎncă nu există evaluări
- Lesson PlanDocument6 paginiLesson Planapi-550666616Încă nu există evaluări
- Thermodynamic Analysis For Industrial Refrigeration SystemsDocument113 paginiThermodynamic Analysis For Industrial Refrigeration SystemsAllan VillanuevaÎncă nu există evaluări
- Dinamika - 4 Kinetika Benda Tegar - Gaya Percepatan IIDocument19 paginiDinamika - 4 Kinetika Benda Tegar - Gaya Percepatan IIAnonymous UwdDHhYUÎncă nu există evaluări
- B 64303EN 1 01 2of3 (Function2 Software)Document804 paginiB 64303EN 1 01 2of3 (Function2 Software)Susana RodriguezÎncă nu există evaluări
- Past Board Exam Problems in StaticsDocument15 paginiPast Board Exam Problems in Staticsherbulariojeeanne19Încă nu există evaluări
- Magnatech Tubemaster 427aDocument113 paginiMagnatech Tubemaster 427aEduardo Ricardo Puga RomeroÎncă nu există evaluări
- Vibration AnalysisDocument29 paginiVibration AnalysisSushanthÎncă nu există evaluări
- Buyersguide Asbrandparts PDFDocument237 paginiBuyersguide Asbrandparts PDFADJIMGARÎncă nu există evaluări
- I Unit PDFDocument5 paginiI Unit PDFgobardhan singhÎncă nu există evaluări
- Valve List TemplateDocument10 paginiValve List Templateeke230% (1)
- Design, Construction and Testing of A Poultry Feed Pellet MachineDocument6 paginiDesign, Construction and Testing of A Poultry Feed Pellet MachineNascimento AlvesÎncă nu există evaluări
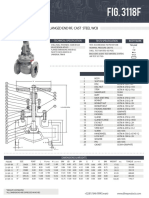
- 3118F 3318F 3618F-SeriesDocument6 pagini3118F 3318F 3618F-SeriesDavid CandoÎncă nu există evaluări
- Sect 4 PCV System 1fs Engine Ce303Document3 paginiSect 4 PCV System 1fs Engine Ce303laura MtÎncă nu există evaluări
- COMSOL Model of Halothane Vaporizer For The Developing WorldDocument19 paginiCOMSOL Model of Halothane Vaporizer For The Developing Worldapi-318956624Încă nu există evaluări
- Balkumari Higher Sec. School: 2. Answer, in Brief, Any Two QuestionsDocument3 paginiBalkumari Higher Sec. School: 2. Answer, in Brief, Any Two QuestionsRabindra Raj BistaÎncă nu există evaluări
- A Comprehensive Review On Process and Engineering Aspects of Pharmaceutical Wet GranulationDocument31 paginiA Comprehensive Review On Process and Engineering Aspects of Pharmaceutical Wet GranulationManuel AlemanÎncă nu există evaluări
- OrcaFlex Training Syllabus v10.3 PDFDocument4 paginiOrcaFlex Training Syllabus v10.3 PDFtrueman44Încă nu există evaluări
- Maintenance Instructions PowerROC T35, T30 and T25Document120 paginiMaintenance Instructions PowerROC T35, T30 and T25defiunikasungti67% (6)
- F CH 4 PresentationDocument58 paginiF CH 4 PresentationTheødřøš ÄbÎncă nu există evaluări
- ANG 23-0616 METALINOXGROUP Several PHE FMA v1Document7 paginiANG 23-0616 METALINOXGROUP Several PHE FMA v1Alexis PradoÎncă nu există evaluări
- Economic Surge Tank DesignDocument6 paginiEconomic Surge Tank DesigncsimsekÎncă nu există evaluări
- Homework For FDGDocument5 paginiHomework For FDGgrace9pengÎncă nu există evaluări
- Fluid Mechanics White 7th SOL Part1 Part3Document5 paginiFluid Mechanics White 7th SOL Part1 Part3Jose EscobarÎncă nu există evaluări
- V112-3MW & VTCDocument50 paginiV112-3MW & VTCManuel PalopÎncă nu există evaluări
- Merc Service Manual 30Document355 paginiMerc Service Manual 30Hayduke them100% (6)