S-ar putea să vă placă și
- CartaDocument2 paginiCartasueloyaguaÎncă nu există evaluări
- Catalogo Zap. ADIDAS FutbolDocument22 paginiCatalogo Zap. ADIDAS FutbolsueloyaguaÎncă nu există evaluări
- MineralDocument4 paginiMineralsueloyaguaÎncă nu există evaluări
- Ir A La Navegación Ir A La Búsqueda Oro (Desambiguación) : para Otros Usos de Este Término, VéaseDocument4 paginiIr A La Navegación Ir A La Búsqueda Oro (Desambiguación) : para Otros Usos de Este Término, VéasesueloyaguaÎncă nu există evaluări
- Logos PocoataDocument2 paginiLogos PocoatasueloyaguaÎncă nu există evaluări
- MineralDocument4 paginiMineralsueloyaguaÎncă nu există evaluări
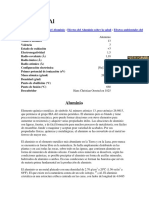
- AluminioDocument8 paginiAluminiowjcampossÎncă nu există evaluări
- Nombramiento RPC Y RPA.Document1 paginăNombramiento RPC Y RPA.sueloyaguaÎncă nu există evaluări
- Ir A La Navegación Ir A La Búsqueda Oro (Desambiguación) : para Otros Usos de Este Término, VéaseDocument4 paginiIr A La Navegación Ir A La Búsqueda Oro (Desambiguación) : para Otros Usos de Este Término, VéasesueloyaguaÎncă nu există evaluări
- TFC Ana Sal - OkDocument166 paginiTFC Ana Sal - OksueloyaguaÎncă nu există evaluări
- AluminioDocument9 paginiAluminiosueloyaguaÎncă nu există evaluări
- Jose Hernandez Martin Fierro Ida y VueltaDocument9 paginiJose Hernandez Martin Fierro Ida y VueltasueloyaguaÎncă nu există evaluări
- AluminioDocument32 paginiAluminiosueloyaguaÎncă nu există evaluări
- AluminioDocument32 paginiAluminiosueloyaguaÎncă nu există evaluări
- Sistemas de Medición AngularDocument1 paginăSistemas de Medición AngularsueloyaguaÎncă nu există evaluări
- SimulacroDocument3 paginiSimulacrosueloyaguaÎncă nu există evaluări
- Sistema Cegesimal de UnidadesDocument3 paginiSistema Cegesimal de Unidadessueloyagua100% (1)
- Sistema Internacional de UnidadesDocument1 paginăSistema Internacional de UnidadessueloyaguaÎncă nu există evaluări
- Sistema de UnidadesDocument1 paginăSistema de UnidadessueloyaguaÎncă nu există evaluări
- Malla Curricular de EstudiosDocument1 paginăMalla Curricular de EstudiossilverioÎncă nu există evaluări
- Conceptos básicos de vectoresDocument75 paginiConceptos básicos de vectoresJames MaxwellÎncă nu există evaluări
- Informe de Control de GradienteDocument13 paginiInforme de Control de GradienteReymer Frank EspirillaÎncă nu există evaluări
- CondutanciaDocument9 paginiCondutanciaOmar MuñozÎncă nu există evaluări
- 5° Plan Cuadernillo 4 2022-2023 Juan PabloDocument10 pagini5° Plan Cuadernillo 4 2022-2023 Juan PabloeeppllÎncă nu există evaluări
- ConsolidaciónDocument107 paginiConsolidaciónJosue Timaná Sandoval100% (1)
- Diseño de Un Diagrama P&Id Con Estrategia de Control de Nivel para Tanque de AlmacenamientoDocument22 paginiDiseño de Un Diagrama P&Id Con Estrategia de Control de Nivel para Tanque de AlmacenamientoAldo LariosÎncă nu există evaluări
- Diseño de La Presa de Tierra SlideDocument7 paginiDiseño de La Presa de Tierra SlideGabaSalasÎncă nu există evaluări
- Simulacion en Control de Un Intercambiador de Calor en SimulinkDocument14 paginiSimulacion en Control de Un Intercambiador de Calor en Simulinkenma100% (1)
- Imp Factor IntegranteDocument14 paginiImp Factor Integranteinformacion_07Încă nu există evaluări
- Sistema de CoordenadasDocument2 paginiSistema de CoordenadaslavizcainoÎncă nu există evaluări
- Logica A La Programacion Tarea 1 q4 AilynDocument14 paginiLogica A La Programacion Tarea 1 q4 AilynAylin Jimenez CÎncă nu există evaluări
- Análisis y Reflexión de Los Resultados AcadémicosDocument7 paginiAnálisis y Reflexión de Los Resultados AcadémicosCARLOS PONCEÎncă nu există evaluări
- 1er Taller EstadisticaDocument4 pagini1er Taller EstadisticaRafael HernandezÎncă nu există evaluări
- Estudio de La Gestión y Control de La Calidad en Ave María Accesorios S.A.S.Document7 paginiEstudio de La Gestión y Control de La Calidad en Ave María Accesorios S.A.S.JaiderCorreaÎncă nu există evaluări
- Zoltan Paul DienesDocument5 paginiZoltan Paul DienesNataly Rosario Pérez Román100% (1)
- La HipérbolaDocument13 paginiLa HipérbolaAndrés CeflÎncă nu există evaluări
- Relaciones de orden y álgebras de BooleDocument15 paginiRelaciones de orden y álgebras de BooleAlexander Cantoral VilchezÎncă nu există evaluări
- Guia 4 Razones y ProporcionesDocument6 paginiGuia 4 Razones y ProporcionesCarlos RodríguezÎncă nu există evaluări
- Práctica de Toma de DecisionesDocument2 paginiPráctica de Toma de Decisionesefrain chaccaÎncă nu există evaluări
- ENDODONCIA Anatomia TopograficaDocument13 paginiENDODONCIA Anatomia TopograficaCoral LisÎncă nu există evaluări
- Roger PenroseDocument5 paginiRoger PenroseEduardo Salgado E.Încă nu există evaluări
- Ejercicios Tarea 2Document2 paginiEjercicios Tarea 2juliana monteroÎncă nu există evaluări
- Álgebra 2do Año Tercer BimestreDocument20 paginiÁlgebra 2do Año Tercer BimestreEnzo Lira VargasÎncă nu există evaluări
- Teoría de Euler para el análisis de pandeo de columnas largas rectas con extremos articuladosDocument51 paginiTeoría de Euler para el análisis de pandeo de columnas largas rectas con extremos articuladosLenin EspinozaÎncă nu există evaluări
- Memoria Descriptiva de Un EstacionamientoDocument7 paginiMemoria Descriptiva de Un EstacionamientoElder Estela CoronelÎncă nu există evaluări
- Construir cubos geométricos y ampliarlosDocument5 paginiConstruir cubos geométricos y ampliarlosAlejandra VillanuevaÎncă nu există evaluări
- Distribucion PoisonDocument25 paginiDistribucion PoisonJuan Camilo NaranjoÎncă nu există evaluări
- Practica 2Document19 paginiPractica 2Javier VGÎncă nu există evaluări
- DSM-5 criterios diagnósticos TEADocument3 paginiDSM-5 criterios diagnósticos TEAyeraldin ordoñezÎncă nu există evaluări
- Guía Práctica 1° Parte Teoría Del ConsumidorDocument14 paginiGuía Práctica 1° Parte Teoría Del ConsumidorAnonymous zJqcCgUg7Încă nu există evaluări