International Journal of Trend in Scientific
Research and Development (IJTSRD)
International Open Access Journal
ISSN No: 2456 - 6470 | www.ijtsrd.com | Volume - 2 | Issue – 3
Design and
nd Fabrication off Bottom Fixture
in
n Robot Soldering Machine
Prof. M. Nandhagopal, Prof. M. Suresh Kumar, J. Arulmurugan, M. Aravind
Department of Mechanical Engineering, Bannari Amman Institute of Technology
Sathyamangalam, Erode
Erode, Tamil Nadu, India
ABSTRACT
The main purpose of this project is to design and it gives the details of even the person
per who did the
manufacture of bottom fixture in Robo Soldering process, in case if there is any issue regarding that
machine and inspect it with the image of the PCB product. This can be designed in such a way to be
captured through Vision Based ed system. Power supply used for other applications also.
has to be turned on to peripheral devices of the
machine before turning on main supply. Status of DIO INTRODUCTION
(Direct Input Output) power supply and field bus
Automation or Automatic control is the use of various
connection is diagnosed at the initialization process.
control systems for operating equipment such as
When the product is kept onn the table and if there is
machinery, processes
rocesses in factories, boilers and heat
no power supply detected then there will be a alarm.
treating ovens, switching in telephone networks,
The process mainly takes place with the help of PLC
steering and stabilization of ships, aircraft and other
and Lab VIEW interfacing. VCC (Verify C C-
applications with minimal or reduced human
Compiler) program software is used .lab VIEW
interventions. Some processes have been completely
programming for automation purpose an and process
automated. The biggest
ggest benefit of automation is that it
repetition and this acts as master and PLC as slave.
saves labor; however, it is also used to save energy
The communication cable that is used is RS232.
and materials and to improve quality, accuracy and
When the component is first placed on the fixture
precision. The term automation, inspired by the earlier
table, a sensor gives the feedback to the controller.
word automatic (coming from automaton), was not
The 4 digit, 7- segment LED display shows the
widely useded before 1947, when General Motors
controller status. An image of the board before
established the automation department. It was during
soldering is captured. Create a position table and a
this time that industry was rapidly adopting feedback
program using the SEL (Services for Export and
controllers, which were introduced in 1930s.
Language) programming language. Now according to
Automation has been achieved by various means
the programming fed, the Robot takes the solder
including mechanical, hydraulic, pneumatic, electrical
materiall and feed it on the points where the soldering
and electronic and computers, usually in combination.
has to be done on the PCB board based on X/Y/Z
Complicated systems, modern factories, airplanes and
coordinate axes. After the soldering is done, an image
is captured. If the soldering is done well with the ships typically use all these combined techniques.
appropriate feed on all pins then we get the inspectio
inspection LabVIEW (Laboratory Virtual Instrument
result as "Good" else the result will be "No Good". If Engineering Workbench) is a system design platform
the result is "Good” then it can be taken to the next and development environment for a visual
level else the same procedure has to be repeated. The programming. National Instruments hardware and
main advantage of this vision based inspection is that software connect your computer to the application to
@ IJTSRD | Available Online @ www.ijtsrd.com | Volume – 2 | Issue – 3 | Mar-Apr
Apr 2018 Page: 61
International Journal of Trend
end in Scientific Research and Development (IJTSRD) ISSN: 2456-6470
2456
offer the widest range of solutions for practically any 1. DESIGN
measurement or automation application.tion. PC based
Machine vision system have the flexibility to address
the needs of research, test and measurement, and
industrial automation vision applications. With this
application, any specification can be easily adjusted
than with traditional tools. Machine
chine vision system
mainly needs camera to acquire the image.
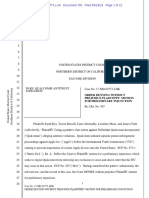
The objective of the project is to develop a machine
for automatic soldering of PCB (Printed Circuit
Board) that is used in DIDs (Driver Information
Display) with required amount of solder metal and to
inspect it through Machine Vision system. The system
has to integrate mechanical and electronics for a
coordinated approach towards making the soldering
process automatic. For the soldering to be done
Fig 1:Isometric view of overall design
without any excess or poor flow, without any
formation
rmation of solder balls and also without any overlap
of solder metal. This design is developed using
DETAILED DRAWING OF COMPONENTS
standard mechanical design methods of all
components. The design is calculated to be safe and Fixture base plate:
accurate.
The frame is the structural portion which the machine
The objective of this project work has been framed above the table and support it.
and the chapters required for the process development
of the Automatic Robot Soldering machine and
Vision Based Inspection has been organized. The
photographs of the project are included in appendix.
The work from the scratch i.e., selection of materials
to the fabrication and completion of the project
PROBLEM IDENTIFICATION
In the robot soldering machine to develop a machine
for automatic soldering of PCB (Printed Circuit
Board) in the machine there is no proper fixture to
hold the PCB in the robot soldering
ring machine. Where
there is a poor flow of soldering while the PCB and
connector is soldering. The fixture is not available for
the all dimensions of various PCB in the robot
soldering machine. The fixture is arranged and it is
designed for various dimensions
ions of PCB and then the Push rod:
soldering to be done without any excess or poor flow, The Push rodod is placed above the fixture base plate.
without any formation of solder balls and also without The push rod is used to support the PCB while the
any overlap of solder metal. This design is developed soldering process takes in the printer circuit board.
using standard mechanical design methods of all The robo soldering machine is applied the soldering
components. The design gn is calculated to be safe and paste to the PCB with connectors the board will act
accurate. deform
m and it may causes damage in the PCB so the
push rod is used to support the PCB in the fixture.
@ IJTSRD | Available Online @ www.ijtsrd.com | Volume – 2 | Issue – 3 | Mar-Apr
Apr 2018 Page: 62
International Journal of Trend
end in Scientific Research and Development (IJTSRD) ISSN: 2456-6470
2456
PCB Side Support:
The PCB side support is placed above the fixture base Hinge:
plate. The side support is used to carry the PCB in the The hinge is placed with the hinge support in the
fixture plate for the soldering process of connector machine. The hinge is fixed with the top plate of
and printer circuit board. fixture and hinge support for the opening and closing
of top plate of fixture.
Hinge support:
The hinge support is placed above the fixture base
plate. The hinge support is carry the hinge to support
the top plate of the fixture in the machine
machine.
OPERATION
The Printer Circuit Board is placed on the fixture. The
fixture is arranged and it is designed to hold the
Printer Circuit Board in the robo soldering machine.
The top plate of the fixture is closed after the board is
placed in the fixture. Then the soldering machine is
ON and the base plate of fixture is moved to the
machine for soldering work. The robo is started to
@ IJTSRD | Available Online @ www.ijtsrd.com | Volume – 2 | Issue – 3 | Mar-Apr
Apr 2018 Page: 63
International Journal of Trend in Scientific Research and Development (IJTSRD) ISSN: 2456-6470
soldering the printer circuit board with connector References
and LED. After completing the soldering work in the
machining process the base plate of the fixture is 1) H Jia, YL Murphey, J Shi, T Chang (2004) "An
moved out to the original position then the top plate of Intelligent Real-time Vision System for Surface
fixture is open and the solder printer circuit board Defect Detection" (IEEE-Proceedings of the
with connecters and LED is removed from the fixture. 17th International Conference on Pattern
Recognition, )
2) J.O. Park, J. Spingler (2008) "Consideration on
ADVANTAGE
the productivity and flexibility in Automatic
It reduces labour power Soldering using Industrial Robots" International
Required less time Journal of advanced Robotics, Vol.4, No.7, p,
Eye protection due to automation. 750-820.
It protects PCB board during soldering process. 3) Lee, C.S., Park,J.O.,(1988)"Development of
Joint soldering should be avoided. mechatronics and robot technology", MOST
More accuracy compare to manual report (2U46-3355-2)
CONCLUSION
4) N.S.S.Mar, C.Fookes, P.K.D.V Yarlagadda
Thus the simultaneous soldering of the accurate
(2001), “Design of Automatic Vision - based
position where the soldering has to be done proves not
inspection system for solder joint
only efficient but also ensures accurate and also
segmentation", IEEE Transactions, Vol.22,
customer's requirement can be met easily. Accuracy
No.3.
mainly comes from the inspection that is done after
the soldering. Thus the objective of the project to 5) Nam, D.H., Chung, S.J., Yun, G.Y., (1989)"A
develop an bottom fixture to hold the PCB in Robo study on the development of the robotonomic
Soldering machine is achieved. soldering system with vibration method"
Second edition, Korea.
6) Petruzella, Frank D. (2005) "Programmable
Logic Controllers", McGraw-Hill, United
States.
7) Stenerson, John (2002) "Industrial Automation
and Process Control", Prentice Hall, First
edition, United States.
@ IJTSRD | Available Online @ www.ijtsrd.com | Volume – 2 | Issue – 3 | Mar-Apr 2018 Page: 64
S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Design Simulation and Hardware Construction of An Arduino Microcontroller Based DC DC High Side Buck Converter For Standalone PV SystemDocument6 paginiDesign Simulation and Hardware Construction of An Arduino Microcontroller Based DC DC High Side Buck Converter For Standalone PV SystemEditor IJTSRDÎncă nu există evaluări
- Sustainable EnergyDocument8 paginiSustainable EnergyEditor IJTSRDÎncă nu există evaluări
- Challenges Faced by The Media in An Attempt To Play Their Roles in Public Awareness On Waste Management in Buea and DoualaDocument18 paginiChallenges Faced by The Media in An Attempt To Play Their Roles in Public Awareness On Waste Management in Buea and DoualaEditor IJTSRDÎncă nu există evaluări
- Women Before and After Islam With Special Reference To ArabDocument3 paginiWomen Before and After Islam With Special Reference To ArabEditor IJTSRDÎncă nu există evaluări
- Deconstructing The Hijra Narrative Reimagining Trans Identities Through Literary PerspectivesDocument6 paginiDeconstructing The Hijra Narrative Reimagining Trans Identities Through Literary PerspectivesEditor IJTSRDÎncă nu există evaluări
- A Pharmaceutical Review On Kaanji and Its Wide Range of ApplicabilityDocument6 paginiA Pharmaceutical Review On Kaanji and Its Wide Range of ApplicabilityEditor IJTSRDÎncă nu există evaluări
- Collective Bargaining and Employee Prosocial Behaviour in The Hospitality Sector in Port HarcourtDocument10 paginiCollective Bargaining and Employee Prosocial Behaviour in The Hospitality Sector in Port HarcourtEditor IJTSRDÎncă nu există evaluări
- Activating Geospatial Information For Sudans Sustainable Investment MapDocument13 paginiActivating Geospatial Information For Sudans Sustainable Investment MapEditor IJTSRDÎncă nu există evaluări
- Educational Unity Embracing Diversity For A Stronger SocietyDocument6 paginiEducational Unity Embracing Diversity For A Stronger SocietyEditor IJTSRDÎncă nu există evaluări
- International Journal of Trend in Scientific Research and Development (IJTSRD)Document13 paginiInternational Journal of Trend in Scientific Research and Development (IJTSRD)Editor IJTSRDÎncă nu există evaluări
- An Analysis On The Use of Image Design With Generative AI TechnologiesDocument4 paginiAn Analysis On The Use of Image Design With Generative AI TechnologiesEditor IJTSRDÎncă nu există evaluări
- Differential Equations Third Order Inhomogeneous Linear With Boundary ConditionsDocument6 paginiDifferential Equations Third Order Inhomogeneous Linear With Boundary ConditionsEditor IJTSRDÎncă nu există evaluări
- Consumers' Impulsive Buying Behavior in Social Commerce PlatformsDocument5 paginiConsumers' Impulsive Buying Behavior in Social Commerce PlatformsEditor IJTSRDÎncă nu există evaluări
- Artificial Intelligence A Boon in Expanding Online Education Through Social Media and Digital Marketing Post Covid 19Document9 paginiArtificial Intelligence A Boon in Expanding Online Education Through Social Media and Digital Marketing Post Covid 19Editor IJTSRDÎncă nu există evaluări
- An Investigation of The Temperature Effect On Solar Panel Efficiency Based On IoT TechnologyDocument7 paginiAn Investigation of The Temperature Effect On Solar Panel Efficiency Based On IoT TechnologyEditor IJTSRDÎncă nu există evaluări
- To Assess The Knowledge and Attitude of Non Professionals Regarding COVID 19 Vaccination A Descriptive StudyDocument4 paginiTo Assess The Knowledge and Attitude of Non Professionals Regarding COVID 19 Vaccination A Descriptive StudyEditor IJTSRDÎncă nu există evaluări
- Effectiveness of Video Teaching Program On Knowledge Regarding 5Fs of Disease Transmission Food, Finger, Fluid, Fomite, Faces Among Children at Selected Setting, ChennaiDocument3 paginiEffectiveness of Video Teaching Program On Knowledge Regarding 5Fs of Disease Transmission Food, Finger, Fluid, Fomite, Faces Among Children at Selected Setting, ChennaiEditor IJTSRDÎncă nu există evaluări
- Sustainable Development A PrimerDocument9 paginiSustainable Development A PrimerEditor IJTSRDÎncă nu există evaluări
- Role of Dashamooladi Niruha Basti Followed by Katibasti in The Management of "Katigraha" W.R.S To Lumbar Spondylosis A Case StudyDocument3 paginiRole of Dashamooladi Niruha Basti Followed by Katibasti in The Management of "Katigraha" W.R.S To Lumbar Spondylosis A Case StudyEditor IJTSRDÎncă nu există evaluări
- Evan Syndrome A Case ReportDocument3 paginiEvan Syndrome A Case ReportEditor IJTSRDÎncă nu există evaluări
- Challenges in Pineapple Cultivation A Case Study of Pineapple Orchards in TripuraDocument4 paginiChallenges in Pineapple Cultivation A Case Study of Pineapple Orchards in TripuraEditor IJTSRDÎncă nu există evaluări
- A Study To Assess The Effectiveness of Art Therapy To Reduce Depression Among Old Age Clients Admitted in Saveetha Medical College and Hospital, Thandalam, ChennaiDocument5 paginiA Study To Assess The Effectiveness of Art Therapy To Reduce Depression Among Old Age Clients Admitted in Saveetha Medical College and Hospital, Thandalam, ChennaiEditor IJTSRDÎncă nu există evaluări
- Importance of Controlled CreditDocument3 paginiImportance of Controlled CreditEditor IJTSRDÎncă nu există evaluări
- H1 L1 Boundedness of Rough Toroidal Pseudo Differential OperatorDocument8 paginiH1 L1 Boundedness of Rough Toroidal Pseudo Differential OperatorEditor IJTSRDÎncă nu există evaluări
- Financial Risk, Capital Adequacy and Liquidity Performance of Deposit Money Banks in NigeriaDocument12 paginiFinancial Risk, Capital Adequacy and Liquidity Performance of Deposit Money Banks in NigeriaEditor IJTSRDÎncă nu există evaluări
- A Study To Assess The Knowledge Regarding Iron Deficiency Anemia Among Reproductive Age Women in Selected Community ThrissurDocument4 paginiA Study To Assess The Knowledge Regarding Iron Deficiency Anemia Among Reproductive Age Women in Selected Community ThrissurEditor IJTSRDÎncă nu există evaluări
- Knowledge Related To Diabetes Mellitus and Self Care Practice Related To Diabetic Foot Care Among Diabetic PatientsDocument4 paginiKnowledge Related To Diabetes Mellitus and Self Care Practice Related To Diabetic Foot Care Among Diabetic PatientsEditor IJTSRDÎncă nu există evaluări
- Concept of Shotha W.S.R To Arishta LakshanaDocument3 paginiConcept of Shotha W.S.R To Arishta LakshanaEditor IJTSRDÎncă nu există evaluări
- An Approach To The Diagnostic Study On Annavaha Srotodusti in Urdwaga Amlapitta WSR To Oesophagogastroduodenoscopic ChangesDocument4 paginiAn Approach To The Diagnostic Study On Annavaha Srotodusti in Urdwaga Amlapitta WSR To Oesophagogastroduodenoscopic ChangesEditor IJTSRDÎncă nu există evaluări
- A Study On Human Resource AccountingDocument3 paginiA Study On Human Resource AccountingEditor IJTSRDÎncă nu există evaluări
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- How To Setup KodiDocument20 paginiHow To Setup KodiGerardo RodríguezÎncă nu există evaluări
- Scilab Recipe 3 - Xcos Blocks Seasoning - Scilab NinjaDocument8 paginiScilab Recipe 3 - Xcos Blocks Seasoning - Scilab NinjaWendell Kim LlanetaÎncă nu există evaluări
- CFX Intro 16.0 App-A ScriptingDocument53 paginiCFX Intro 16.0 App-A ScriptingJorge Luis Ramos Cuipa100% (2)
- 18 08 29Document22 pagini18 08 29Florian MuellerÎncă nu există evaluări
- Fundamentals of Problem Solving and Programming 1Document50 paginiFundamentals of Problem Solving and Programming 1GianJyrellAlbertoCorletÎncă nu există evaluări
- Sap IntertrDocument28 paginiSap IntertrAnonymous 4PnhkGJ0PÎncă nu există evaluări
- Guide For Interface Developers: Everything You Need To Know About Energyplus Input and OutputDocument33 paginiGuide For Interface Developers: Everything You Need To Know About Energyplus Input and OutputWormInchÎncă nu există evaluări
- A Jump Start to OpenCL: Another Language for Parallel ComputingDocument74 paginiA Jump Start to OpenCL: Another Language for Parallel ComputingkaoutarÎncă nu există evaluări
- Interpolation in GNU RadioDocument9 paginiInterpolation in GNU RadioRakesh S KÎncă nu există evaluări
- Object Oriented Programming C++ GuideDocument43 paginiObject Oriented Programming C++ GuideSumant LuharÎncă nu există evaluări
- Communicating Globally in a Digital AgeDocument22 paginiCommunicating Globally in a Digital AgeRaffy Torres GabuyogÎncă nu există evaluări
- Introduccion A La Psicologia Charles Morris PDF DescargarDocument4 paginiIntroduccion A La Psicologia Charles Morris PDF DescargarLucas ZarachoÎncă nu există evaluări
- SCTFDocument17 paginiSCTFShurieUÎncă nu există evaluări
- Lesson 01 Automation ToolsDocument46 paginiLesson 01 Automation ToolsKrish LeeÎncă nu există evaluări
- How to setup Bristol Audio Synthesis with 64 StudioDocument5 paginiHow to setup Bristol Audio Synthesis with 64 StudiobobmeanzaÎncă nu există evaluări
- Table Invalid Index DumpDocument9 paginiTable Invalid Index DumpBac AstonÎncă nu există evaluări
- Shekhar - Business Ecosystem Analysis For Strategic Decision MakingDocument82 paginiShekhar - Business Ecosystem Analysis For Strategic Decision MakingTuladhar LindaÎncă nu există evaluări
- Scan APIDocument183 paginiScan APIChitradeep Dutta RoyÎncă nu există evaluări
- An Introduction To Optimal Control Applied To Disease ModelsDocument37 paginiAn Introduction To Optimal Control Applied To Disease ModelsMohammad Umar RehmanÎncă nu există evaluări
- Matlab Z TransformDocument3 paginiMatlab Z TransformbhatsindhoorÎncă nu există evaluări
- Microsoft AZ-400 Dumps PDF - Bona Fied and ValidDocument28 paginiMicrosoft AZ-400 Dumps PDF - Bona Fied and Validjenny longbottom0% (1)
- Ami Bios Beep CodesDocument10 paginiAmi Bios Beep CodestaingashuÎncă nu există evaluări
- Operational GuideDocument55 paginiOperational GuidehossainmzÎncă nu există evaluări
- Seminar Report On Global Mobile SatelliteDocument36 paginiSeminar Report On Global Mobile Satellitenjpatel9100% (2)
- Datapath OverviewDocument7 paginiDatapath OverviewJonathan TinnerÎncă nu există evaluări
- Basic Computer Organization and Design Lecture OverviewDocument38 paginiBasic Computer Organization and Design Lecture OverviewTaranvir KaurÎncă nu există evaluări
- InstallDocument9 paginiInstalldothadungÎncă nu există evaluări
- GMCC GPRS & EDGE RADIO KPI DASHBOARDDocument18 paginiGMCC GPRS & EDGE RADIO KPI DASHBOARDyousef shabanÎncă nu există evaluări
- WSGI Werkzeug and The Challenges of Building A Python Web FrameworkDocument22 paginiWSGI Werkzeug and The Challenges of Building A Python Web FrameworkIgor Guerrero FonsecaÎncă nu există evaluări
- MATLAB ExperimentsDocument16 paginiMATLAB Experimentsishan varshneyÎncă nu există evaluări