S-ar putea să vă placă și
- c06 Calm BuoyDocument4 paginic06 Calm BuoyputhenkulamÎncă nu există evaluări
- Validation of CFD Simulations of The Flow Around A Full Scale Rowing Blade With Realistic KinematicsDocument14 paginiValidation of CFD Simulations of The Flow Around A Full Scale Rowing Blade With Realistic KinematicsValentina DiamanteÎncă nu există evaluări
- Discussion On Effects of LCB Location On Seakeeping AnalysisDocument26 paginiDiscussion On Effects of LCB Location On Seakeeping AnalysisJake BrohawnÎncă nu există evaluări
- Y&B Design - The Disgn of BoatsDocument66 paginiY&B Design - The Disgn of BoatsEuclides Cagnini100% (1)
- Executive Summary:: International Maritime OrganizationDocument6 paginiExecutive Summary:: International Maritime OrganizationdarrelsilvaÎncă nu există evaluări
- Peer Reviewed VersionDocument12 paginiPeer Reviewed VersionOm Parkash SharmaÎncă nu există evaluări
- Planing Hull HydrodynamicsDocument673 paginiPlaning Hull Hydrodynamicsartimus_2kÎncă nu există evaluări
- Fulltext01Document104 paginiFulltext01kleidi85Încă nu există evaluări
- 4 - Hydrostatic Particulars (Stability Book)Document22 pagini4 - Hydrostatic Particulars (Stability Book)Enrique Arroyo100% (1)
- Investigation on aerodynamic performance of liner compressor cascade with tubercle leading edge bladeDocument12 paginiInvestigation on aerodynamic performance of liner compressor cascade with tubercle leading edge bladeMiguelMazzucchelliÎncă nu există evaluări
- Optimization of Ships in Shallow Water With Viscous Flow Computations and Surrogate ModelingDocument9 paginiOptimization of Ships in Shallow Water With Viscous Flow Computations and Surrogate ModelingTat-Hien LeÎncă nu există evaluări
- Anchor TheoryDocument7 paginiAnchor TheorymadbakingÎncă nu există evaluări
- Structural Design of A Semi-Submersible Platform With Water-Entrapment Plates Based On A Time-Domain Hydrodynamic Algorithm Coupled With Finite-ElementsDocument8 paginiStructural Design of A Semi-Submersible Platform With Water-Entrapment Plates Based On A Time-Domain Hydrodynamic Algorithm Coupled With Finite-Elementssaeed-21Încă nu există evaluări
- Sample NAME QuestionsDocument16 paginiSample NAME Questionssarah rashaÎncă nu există evaluări
- Planing in Extreme Conditions - Blount, Funkhouser 2009Document14 paginiPlaning in Extreme Conditions - Blount, Funkhouser 2009haujesÎncă nu există evaluări
- Marine Propeller Noise EstimationDocument9 paginiMarine Propeller Noise EstimationΗλίαςÎncă nu există evaluări
- Na ThesisDocument36 paginiNa Thesisrohith bhogadiÎncă nu există evaluări
- Tuck RevisedDocument16 paginiTuck RevisedSaiSudhakar MamidipakaÎncă nu există evaluări
- Illustrated Sail & Rig Tuning: Genoa & mainsail trim, spinnaker & gennaker, rig tuningDe la EverandIllustrated Sail & Rig Tuning: Genoa & mainsail trim, spinnaker & gennaker, rig tuningEvaluare: 3.5 din 5 stele3.5/5 (2)
- Savitsky Brown 76Document20 paginiSavitsky Brown 76yauret123Încă nu există evaluări
- 03 The Foiling OptimistDocument12 pagini03 The Foiling OptimisttoncipÎncă nu există evaluări
- Jarosław Artyszuk PDFDocument16 paginiJarosław Artyszuk PDFCharles JonesÎncă nu există evaluări
- Form Kapal Ikan Tradisional Tipe Daerah Batang: Studi Komparasi Kinerja Hull Form Metode Scheltema Dengan HullDocument11 paginiForm Kapal Ikan Tradisional Tipe Daerah Batang: Studi Komparasi Kinerja Hull Form Metode Scheltema Dengan HullAchmad ZakariaÎncă nu există evaluări
- Blasting On PipeDocument41 paginiBlasting On PipekometmayorÎncă nu există evaluări
- (Catamaran) Effect of Hull Form and Its Associated Parameters On The Resistance of A Catamaran - MaxsurfDocument11 pagini(Catamaran) Effect of Hull Form and Its Associated Parameters On The Resistance of A Catamaran - MaxsurfWm Erick Cr100% (1)
- Hiper04 Paper ADocument13 paginiHiper04 Paper AaspoisdÎncă nu există evaluări
- Applications and Limitations of Potential Flow Codes For The Wave Making ProblemDocument18 paginiApplications and Limitations of Potential Flow Codes For The Wave Making ProblemRita Morice GómezÎncă nu există evaluări
- Computational Fluid Dynamics Model of Wells Turbine For OscillatingDocument10 paginiComputational Fluid Dynamics Model of Wells Turbine For OscillatingAa AnimationsÎncă nu există evaluări
- Executive Summary:: International Maritime OrganizationDocument11 paginiExecutive Summary:: International Maritime OrganizationelmauioÎncă nu există evaluări
- DNV CFD Assessment of Wavefoil EffectDocument7 paginiDNV CFD Assessment of Wavefoil Effectsea33Încă nu există evaluări
- LR 1964 Pada Longitudinal StrengthDocument245 paginiLR 1964 Pada Longitudinal Strengthlailaiza magfirohÎncă nu există evaluări
- Oe 72 (2013) 453 SRS, CGSDocument17 paginiOe 72 (2013) 453 SRS, CGSsbnrs68Încă nu există evaluări
- Ikeda RevisitedDocument11 paginiIkeda RevisitedZawadul IslamÎncă nu există evaluări
- 2104-Empirical Calculation of Roll Damping For Ships PDFDocument18 pagini2104-Empirical Calculation of Roll Damping For Ships PDFDennys RamirezÎncă nu există evaluări
- Calculation of Submarine Derivatives - Ucl CourseDocument45 paginiCalculation of Submarine Derivatives - Ucl CourseLuciano Ondir100% (2)
- Ship Design For Efficiency and Economy-7-226-47-52Document6 paginiShip Design For Efficiency and Economy-7-226-47-52galin8575Încă nu există evaluări
- Prediction of Stress Spectra Under Low-Period Sea States: Ships and Offshore StructuresDocument13 paginiPrediction of Stress Spectra Under Low-Period Sea States: Ships and Offshore StructureslapuÎncă nu există evaluări
- Amecrc PDFDocument17 paginiAmecrc PDFshimul2008Încă nu există evaluări
- The Aerodynamic Forces On Airships 1922Document11 paginiThe Aerodynamic Forces On Airships 1922te.iubesc777Încă nu există evaluări
- List of Crusing BoatsDocument61 paginiList of Crusing BoatsJim Kiesling100% (2)
- Ship Stabilizers: A Handbook for Merchant Navy OfficersDe la EverandShip Stabilizers: A Handbook for Merchant Navy OfficersÎncă nu există evaluări
- Hybrid Buoy-Vessel Modelling: Knowledge Base ArticleDocument6 paginiHybrid Buoy-Vessel Modelling: Knowledge Base ArticleSalvatore MonacoÎncă nu există evaluări
- Why The Bollard Pull Calculation Method For A Barge Won't Work For A Ship - TheNavalArchDocument17 paginiWhy The Bollard Pull Calculation Method For A Barge Won't Work For A Ship - TheNavalArchFederico BabichÎncă nu există evaluări
- The Bernoulli Hump Generated by A Submarine: March 2015Document9 paginiThe Bernoulli Hump Generated by A Submarine: March 2015Narahari HunsurÎncă nu există evaluări
- Safety Analysis of Mooring Hawser of FSO and SPM B PDFDocument10 paginiSafety Analysis of Mooring Hawser of FSO and SPM B PDFORUGAÎncă nu există evaluări
- SESS 6066: Sailing Yacht and Powercraft DesignDocument6 paginiSESS 6066: Sailing Yacht and Powercraft DesignIan RidzuanÎncă nu există evaluări
- Research On Bulbous Bow Ships Part L.a: Studiecentrum T.N.O. Voor Scheepsbouw en NavigatieDocument23 paginiResearch On Bulbous Bow Ships Part L.a: Studiecentrum T.N.O. Voor Scheepsbouw en NavigatieFederico BabichÎncă nu există evaluări
- FreeseDocument15 paginiFreeseBrandon HaleÎncă nu există evaluări
- Seakeeping RAODocument5 paginiSeakeeping RAOEgwuatu UchennaÎncă nu există evaluări
- Computational analysis of sail performanceDocument8 paginiComputational analysis of sail performanceval-ovidiu iordacheÎncă nu există evaluări
- Generating Spectral RAOsDocument4 paginiGenerating Spectral RAOsSalvatore MonacoÎncă nu există evaluări
- Notes Wave Bending MomentDocument7 paginiNotes Wave Bending MomentVivek GuptaÎncă nu există evaluări
- Ka Kowska - Intact Stability - 49-2017Document4 paginiKa Kowska - Intact Stability - 49-2017abhishek lavaniaÎncă nu există evaluări
- Numerical Simulation of A Cavitating Draft Tube VoDocument6 paginiNumerical Simulation of A Cavitating Draft Tube VoAhmed AhmedÎncă nu există evaluări
- Keuning - Further Investigation Into The Hydrodynamic Performance of The AXE Bow ConceptDocument15 paginiKeuning - Further Investigation Into The Hydrodynamic Performance of The AXE Bow ConcepteÎncă nu există evaluări
- Wave Mechanics and Wave Loads on Marine StructuresDe la EverandWave Mechanics and Wave Loads on Marine StructuresÎncă nu există evaluări
- Navigation & Voyage Planning Companions: Navigation, Nautical Calculation & Passage Planning CompanionsDe la EverandNavigation & Voyage Planning Companions: Navigation, Nautical Calculation & Passage Planning CompanionsÎncă nu există evaluări
- B23-14 - TERMPOL Surveys and Studies - Section 3.14 - Single Point Mooring Provisions and Procedures A1Z6J8Document17 paginiB23-14 - TERMPOL Surveys and Studies - Section 3.14 - Single Point Mooring Provisions and Procedures A1Z6J8HASHMI MAHMOODÎncă nu există evaluări
- Wiriting 014 PDFDocument26 paginiWiriting 014 PDFSaranyieh RamasamyÎncă nu există evaluări
- Design ProcessDocument54 paginiDesign Processteoteoteo1988100% (2)
- BI - Modul Potensi Cemerlang Amanjaya SPM 2017Document128 paginiBI - Modul Potensi Cemerlang Amanjaya SPM 2017Aazril71Încă nu există evaluări
- Narrative Writing Practice ModuleDocument26 paginiNarrative Writing Practice ModuleNoorbeti Ahmad Diah100% (1)
- Rome - Ga PlanDocument2 paginiRome - Ga PlanHASHMI MAHMOODÎncă nu există evaluări
- Narrative Writing Practice ModuleDocument26 paginiNarrative Writing Practice ModuleNoorbeti Ahmad Diah100% (1)
- Contoh Karangan Bahasa Inggeris MudahDocument17 paginiContoh Karangan Bahasa Inggeris MudahAezelly82% (159)
- Skema Jawapan - Maths Ting 3 Buku Latihan Mastery KSSM 2019 PDFDocument77 paginiSkema Jawapan - Maths Ting 3 Buku Latihan Mastery KSSM 2019 PDFHASHMI MAHMOOD54% (28)
- ZEE Pipeline Engineering Capability Statement PDFDocument17 paginiZEE Pipeline Engineering Capability Statement PDFHASHMI MAHMOODÎncă nu există evaluări
- Form 4 Add Maths NoteDocument9 paginiForm 4 Add Maths NoteHayati Aini Ahmad100% (1)
- Design ProcessDocument54 paginiDesign Processteoteoteo1988100% (2)
- Contoh Karangan Bahasa Inggeris MudahDocument17 paginiContoh Karangan Bahasa Inggeris MudahAezelly82% (159)
- Skema GG 1 Mate K2Document10 paginiSkema GG 1 Mate K2W.y. JeeÎncă nu există evaluări
- KSS Accountant Jul 11Document1 paginăKSS Accountant Jul 11HASHMI MAHMOODÎncă nu există evaluări
- English Exercise Fill in The BlanksDocument24 paginiEnglish Exercise Fill in The BlanksjoannadavÎncă nu există evaluări
- KREUZ SUPPORTER Dive BargeDocument3 paginiKREUZ SUPPORTER Dive BargeHASHMI MAHMOODÎncă nu există evaluări
- Wiriting 014 PDFDocument26 paginiWiriting 014 PDFSaranyieh RamasamyÎncă nu există evaluări
- Kreuz GloriousDocument4 paginiKreuz GloriousHASHMI MAHMOOD100% (1)
- Addax Okwori AntanDocument2 paginiAddax Okwori AntanHASHMI MAHMOODÎncă nu există evaluări
- Chevron Tombua LandanaDocument2 paginiChevron Tombua LandanaHASHMI MAHMOODÎncă nu există evaluări
- Chevron Tombua LandanaDocument2 paginiChevron Tombua LandanaHASHMI MAHMOODÎncă nu există evaluări
- Total ClovDocument2 paginiTotal ClovHASHMI MAHMOODÎncă nu există evaluări
- I01 Streamer ArrayDocument2 paginiI01 Streamer ArrayHASHMI MAHMOODÎncă nu există evaluări
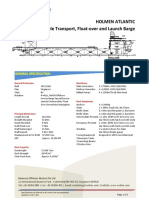
- HOLMEN ATLANTIC Submersible Transport BargeDocument3 paginiHOLMEN ATLANTIC Submersible Transport BargeHASHMI MAHMOODÎncă nu există evaluări
- Chevron Tombua LandanaDocument2 paginiChevron Tombua LandanaHASHMI MAHMOODÎncă nu există evaluări
- Chevron Tombua LandanaDocument2 paginiChevron Tombua LandanaHASHMI MAHMOODÎncă nu există evaluări
- Holmen Arctic Updated On 2011-08-03Document2 paginiHolmen Arctic Updated On 2011-08-03HASHMI MAHMOODÎncă nu există evaluări
- Codes and Standards For Natural GasDocument2 paginiCodes and Standards For Natural GasHASHMI MAHMOODÎncă nu există evaluări
- Codes & Standards For Natural GasDocument13 paginiCodes & Standards For Natural Gasharikrishnanpd3327Încă nu există evaluări
- Shell Momentum Balance 1Document5 paginiShell Momentum Balance 1Borakovsky IvanovskyÎncă nu există evaluări
- OA 1 - Measurements and KinematicsDocument12 paginiOA 1 - Measurements and KinematicsRay ChuaÎncă nu există evaluări
- STATIC NOTES Notes 6Document56 paginiSTATIC NOTES Notes 6nfatihahÎncă nu există evaluări
- Solutions For IphoDocument28 paginiSolutions For IphoVishalÎncă nu există evaluări
- Quality Control Materials ConstructionDocument74 paginiQuality Control Materials ConstructionMark James MateoÎncă nu există evaluări
- Mechanical Properties Guide for MaterialsDocument55 paginiMechanical Properties Guide for MaterialsbinoÎncă nu există evaluări
- Using The Hollomon Model To Predict Strain-Hardening in MetalsDocument4 paginiUsing The Hollomon Model To Predict Strain-Hardening in MetalsGuilherme ResendeÎncă nu există evaluări
- IDEA Connection Theoretical Manual en Ver 8 0Document56 paginiIDEA Connection Theoretical Manual en Ver 8 0harislee100% (1)
- Ansys Tutorial Analysis of A Beam With A Distributed Load: PreprocessingDocument5 paginiAnsys Tutorial Analysis of A Beam With A Distributed Load: PreprocessingLatifa BoussaliaÎncă nu există evaluări
- Reaction Turbines: 1. Radially Outward Flow Reaction Turbine: This Reaction TurbineDocument16 paginiReaction Turbines: 1. Radially Outward Flow Reaction Turbine: This Reaction TurbinesaitejaÎncă nu există evaluări
- 03 Assignment-3 Circular Motion SCDocument9 pagini03 Assignment-3 Circular Motion SCPiyush PandaÎncă nu există evaluări
- Blade Energy Partners - IPC2008-64565Document8 paginiBlade Energy Partners - IPC2008-64565Randyll TarlyÎncă nu există evaluări
- Balanced ForcesDocument21 paginiBalanced ForcesgaluhfahmiÎncă nu există evaluări
- Machine Elements - Lubrication and BearingsDocument13 paginiMachine Elements - Lubrication and BearingsShridhar ChinuuÎncă nu există evaluări
- Formula FizikDocument2 paginiFormula Fiziksunarti ahmadÎncă nu există evaluări
- Chapter 3 Problems: Article 3/3 Problems Introductory ProblemsDocument55 paginiChapter 3 Problems: Article 3/3 Problems Introductory ProblemsM100% (1)
- 001 2017 4 BDocument108 pagini001 2017 4 BMluleki Dean DladlaÎncă nu există evaluări
- JEE Main 2020 7th Jan Shift 1 PhysicsDocument16 paginiJEE Main 2020 7th Jan Shift 1 PhysicsR B SHARANÎncă nu există evaluări
- Lecture 6 - TorsionDocument25 paginiLecture 6 - TorsionCJ Valete JacobÎncă nu există evaluări
- An Analytic Solution of One-Dimensional Steady-State Pennes' Bioheat Transfer Equation in Cylindrical Coordinates - SpringerDocument5 paginiAn Analytic Solution of One-Dimensional Steady-State Pennes' Bioheat Transfer Equation in Cylindrical Coordinates - SpringerBasudeb ShitÎncă nu există evaluări
- (1.0 Credit) : Structural Analysis and Design Sessional-IDocument34 pagini(1.0 Credit) : Structural Analysis and Design Sessional-IAnonymous aE0YYlCOKÎncă nu există evaluări
- Tutorial 3Document15 paginiTutorial 3carleston thurgoodÎncă nu există evaluări
- Sokolov - Quantum MehcanicsDocument566 paginiSokolov - Quantum MehcanicsGianniNicheli100% (1)
- Angular Speed and Satellite OrbitDocument11 paginiAngular Speed and Satellite OrbitAbhay RanjitÎncă nu există evaluări
- Cagayan State University: in Partial Fulfilment For The Requirements of The CourseDocument22 paginiCagayan State University: in Partial Fulfilment For The Requirements of The CourseFrendick LegaspiÎncă nu există evaluări
- Chapter 2 Practice WorksheetDocument7 paginiChapter 2 Practice WorksheetMohammad Ali100% (1)
- Transmission Loss (Duct Acoustics)Document4 paginiTransmission Loss (Duct Acoustics)신동호Încă nu există evaluări
- Fluid Statics PDFDocument3 paginiFluid Statics PDFAnisa RachmanÎncă nu există evaluări
- Journal Bearing Lubrication Theory and DesignDocument17 paginiJournal Bearing Lubrication Theory and DesignAndres Alberto Osorio YupanquiÎncă nu există evaluări
- Non-Linear Analysis Models For Composite Plate Shear Walls-ConcreteDocument14 paginiNon-Linear Analysis Models For Composite Plate Shear Walls-ConcreteHamid GoodarziÎncă nu există evaluări