S-ar putea să vă placă și
- Sk40c Pic 16f877a Crash CourseDocument24 paginiSk40c Pic 16f877a Crash Coursezulko100% (3)
- 10 Projects With Mikrobasic PicDocument132 pagini10 Projects With Mikrobasic PicRegisAbdalla100% (7)
- 2.2.1.4 Packet Tracer - Simulating IoT DevicesDocument5 pagini2.2.1.4 Packet Tracer - Simulating IoT DevicesMuhammad AkbarÎncă nu există evaluări
- Creating First Project in Mikrobasic For PicDocument0 paginiCreating First Project in Mikrobasic For PicNh Chuminda YapaÎncă nu există evaluări
- Boot Loader Enable PIC Micro ControllersDocument8 paginiBoot Loader Enable PIC Micro Controllersjoeccorrrea100% (2)
- Intermediate C Programming for the PIC Microcontroller: Simplifying Embedded ProgrammingDe la EverandIntermediate C Programming for the PIC Microcontroller: Simplifying Embedded ProgrammingÎncă nu există evaluări
- 2.2.1.4 Packet Tracer - Simulating IoT Devices Ep2Document5 pagini2.2.1.4 Packet Tracer - Simulating IoT Devices Ep2Diego SotomayorÎncă nu există evaluări
- 2.2.1.4 Packet Tracer - Simulating IoT Devices - M0517010Document5 pagini2.2.1.4 Packet Tracer - Simulating IoT Devices - M0517010Astika IstiningrumÎncă nu există evaluări
- NEE 3104 EXPT 5 Siemens S7 200 PLCDocument16 paginiNEE 3104 EXPT 5 Siemens S7 200 PLCjonel sarmenÎncă nu există evaluări
- USB PIC Programmer User Guide: WWW - Belmag.rsDocument10 paginiUSB PIC Programmer User Guide: WWW - Belmag.rsBojanKsÎncă nu există evaluări
- AVR TutorialDocument11 paginiAVR Tutorialletanbaospkt06Încă nu există evaluări
- TP1 - NiosII - SOPCBuilder - LabsDocument55 paginiTP1 - NiosII - SOPCBuilder - LabsMiraOui KaoutharÎncă nu există evaluări
- Designing With The Nios II Processor and SOPC Builder Exercise ManualDocument55 paginiDesigning With The Nios II Processor and SOPC Builder Exercise ManualNatthaphob NimpitiwanÎncă nu există evaluări
- Programming Arduino Projects with the PIC Microcontroller: A Line-by-Line Code Analysis and Complete Reference Guide for Embedded Programming in CDe la EverandProgramming Arduino Projects with the PIC Microcontroller: A Line-by-Line Code Analysis and Complete Reference Guide for Embedded Programming in CÎncă nu există evaluări
- 2 2 1 4Document6 pagini2 2 1 4Ralph ValenzuelaÎncă nu există evaluări
- 1st Project Dspic BasicDocument4 pagini1st Project Dspic Basickywheat3306Încă nu există evaluări
- QL200 Manual y Esquematicos Del EntrenadorDocument41 paginiQL200 Manual y Esquematicos Del Entrenador9io100% (1)
- Keil Uvision 3 TutorialDocument12 paginiKeil Uvision 3 Tutorialapi-3697475100% (1)
- LAB2Document10 paginiLAB2Phạm Nguyễn Hoàng SaÎncă nu există evaluări
- PIC K150 Programmer ManualDocument9 paginiPIC K150 Programmer ManualEdwin Alexis RiosÎncă nu există evaluări
- Pic ManualDocument30 paginiPic Manualgg.ganapathy100% (2)
- PSoC 3Document25 paginiPSoC 3studedictsÎncă nu există evaluări
- PIC Projects and Applications using C: A Project-based ApproachDe la EverandPIC Projects and Applications using C: A Project-based ApproachEvaluare: 4 din 5 stele4/5 (2)
- OEM-PIC Kit2 Programmer: 1.featuresDocument15 paginiOEM-PIC Kit2 Programmer: 1.featuresМанфред ДорнбрухÎncă nu există evaluări
- Micro Lab Experiment#1Document4 paginiMicro Lab Experiment#1Umair HameedÎncă nu există evaluări
- VSK - 2148 Emb LabDocument73 paginiVSK - 2148 Emb LabrahumanÎncă nu există evaluări
- Configure GPIODocument7 paginiConfigure GPIOMd.Habibur Rahman HabibÎncă nu există evaluări
- Lab 1Document10 paginiLab 1zagarzusemÎncă nu există evaluări
- 2.2.1.4 Packet Tracer - Simulating IoT DevicesDocument6 pagini2.2.1.4 Packet Tracer - Simulating IoT DevicesHalima AqraaÎncă nu există evaluări
- Integrated Circuit Debugger and Target Board Module (ICD/TB)Document10 paginiIntegrated Circuit Debugger and Target Board Module (ICD/TB)jiunsien5577Încă nu există evaluări
- SK Getting Started With PICBASIC PRODocument14 paginiSK Getting Started With PICBASIC PROcirocarÎncă nu există evaluări
- 2 2 4 A Designtoollogicconverter (Finished)Document6 pagini2 2 4 A Designtoollogicconverter (Finished)api-283923425Încă nu există evaluări
- MCHP Usb Otg Com3202 v095 Lab Manual PhilipDocument69 paginiMCHP Usb Otg Com3202 v095 Lab Manual PhilipBerat Neslihan100% (2)
- Getting Started Guide: No Coding, No Limits..Document8 paginiGetting Started Guide: No Coding, No Limits..jchpipoasÎncă nu există evaluări
- Ride IntroDocument15 paginiRide IntrosakthikothandapaniÎncă nu există evaluări
- Lab 2-1 Develop Software Nios PIODocument11 paginiLab 2-1 Develop Software Nios PIONguyên Trịnh Vũ ĐăngÎncă nu există evaluări
- Mbed IntroductionDocument6 paginiMbed IntroductionNaveed Anwar BhattiÎncă nu există evaluări
- Iotroboticarm: InstructablesDocument4 paginiIotroboticarm: InstructablesUdit FandÎncă nu există evaluări
- Infineon-CE222306 - PSoC - 4 - I2C - Communication - With - Serial - Communication - Block - (SCB) - Code Example-V03 - 00-ENDocument10 paginiInfineon-CE222306 - PSoC - 4 - I2C - Communication - With - Serial - Communication - Block - (SCB) - Code Example-V03 - 00-ENPiyush Kumar SahooÎncă nu există evaluări
- PIC K150 ManualDocument9 paginiPIC K150 ManualMarcos InfanteÎncă nu există evaluări
- Tutorial BLE112Document49 paginiTutorial BLE112Rishabh67% (3)
- University of Perpetual Help System Dalta Las Pinas Campus: College of Engineering Electtrical Engineering DepartmentDocument14 paginiUniversity of Perpetual Help System Dalta Las Pinas Campus: College of Engineering Electtrical Engineering DepartmentKiel DalisayÎncă nu există evaluări
- Practical Work 4 Salleh AbasDocument10 paginiPractical Work 4 Salleh AbasMuhd Syazmi F1050Încă nu există evaluări
- Pic Programmer by Myke PredkoDocument10 paginiPic Programmer by Myke PredkoAnonymous HNCgfojJC0% (1)
- ECE342 Lab 1Document4 paginiECE342 Lab 1kinglbfÎncă nu există evaluări
- Lab6 PicoDocument3 paginiLab6 PicoteshagereÎncă nu există evaluări
- Monalyn Señaris - 2.2.1.4 Packet Tracer - Simulating IoT DevicesDocument5 paginiMonalyn Señaris - 2.2.1.4 Packet Tracer - Simulating IoT DevicesMonalyn SeñarisÎncă nu există evaluări
- STK500 User GuideDocument16 paginiSTK500 User GuideupeshalaÎncă nu există evaluări
- MPLab Installation V889Document11 paginiMPLab Installation V889Janine AdamsÎncă nu există evaluări
- Nrf24l01 Tutorial 1 Pic18Document9 paginiNrf24l01 Tutorial 1 Pic18Silvanei Fonseca LeandroÎncă nu există evaluări
- MP Lab Report # 1Document10 paginiMP Lab Report # 1Hassan Zeb Akhtar ZebÎncă nu există evaluări
- Practical 1 PDFDocument15 paginiPractical 1 PDFNaitik DrumistÎncă nu există evaluări
- Practical Assignment - 1:: Arduino Interface With Simulink®Document14 paginiPractical Assignment - 1:: Arduino Interface With Simulink®Singam SridharÎncă nu există evaluări
- PLC Programming from Novice to Professional: Learn PLC Programming with Training VideosDe la EverandPLC Programming from Novice to Professional: Learn PLC Programming with Training VideosEvaluare: 5 din 5 stele5/5 (1)
- Designing Embedded Systems with 32-Bit PIC Microcontrollers and MikroCDe la EverandDesigning Embedded Systems with 32-Bit PIC Microcontrollers and MikroCEvaluare: 5 din 5 stele5/5 (2)
- C Programming Wizardry: From Zero to Hero in 10 Days: Programming Prodigy: From Novice to Virtuoso in 10 DaysDe la EverandC Programming Wizardry: From Zero to Hero in 10 Days: Programming Prodigy: From Novice to Virtuoso in 10 DaysÎncă nu există evaluări
- C Programming for the PIC Microcontroller: Demystify Coding with Embedded ProgrammingDe la EverandC Programming for the PIC Microcontroller: Demystify Coding with Embedded ProgrammingÎncă nu există evaluări
- PLC Programming Using SIMATIC MANAGER for Beginners: With Basic Concepts of Ladder Logic ProgrammingDe la EverandPLC Programming Using SIMATIC MANAGER for Beginners: With Basic Concepts of Ladder Logic ProgrammingEvaluare: 4 din 5 stele4/5 (1)
- PIC32 Microcontrollers and the Digilent Chipkit: Introductory to Advanced ProjectsDe la EverandPIC32 Microcontrollers and the Digilent Chipkit: Introductory to Advanced ProjectsEvaluare: 5 din 5 stele5/5 (1)
- IO TinkercardLabDocument21 paginiIO TinkercardLabAnonymous IhmXvCHj3cÎncă nu există evaluări
- Interface Mouselistener: Event Listener (Java - Awt.Event)Document2 paginiInterface Mouselistener: Event Listener (Java - Awt.Event)Anonymous IhmXvCHj3cÎncă nu există evaluări
- Building GUIs With AWTDocument20 paginiBuilding GUIs With AWTAnonymous IhmXvCHj3cÎncă nu există evaluări
- JEDI Slides-Intro2-Chapter01-Review of Basic Concepts in JavaDocument81 paginiJEDI Slides-Intro2-Chapter01-Review of Basic Concepts in JavaAnonymous IhmXvCHj3cÎncă nu există evaluări
- JEDI Slides-Intro2-Chapter11-AppletsDocument30 paginiJEDI Slides-Intro2-Chapter11-AppletsAnonymous IhmXvCHj3cÎncă nu există evaluări
- GizmoII User GuideDocument20 paginiGizmoII User GuideAnonymous IhmXvCHj3cÎncă nu există evaluări
- Cpre 588 Embedded Computer SystemsDocument48 paginiCpre 588 Embedded Computer SystemsAnonymous IhmXvCHj3cÎncă nu există evaluări
- The Microprocessor and Its ArchitectureDocument23 paginiThe Microprocessor and Its ArchitectureAnonymous IhmXvCHj3cÎncă nu există evaluări
- Cpre 588 Embedded Computer SystemsDocument59 paginiCpre 588 Embedded Computer SystemsAnonymous IhmXvCHj3cÎncă nu există evaluări
- Cpre 588 Embedded Computer SystemsDocument47 paginiCpre 588 Embedded Computer SystemsAnonymous IhmXvCHj3cÎncă nu există evaluări
- SQL MySQL Commands BasicDocument28 paginiSQL MySQL Commands BasicAnonymous IhmXvCHj3cÎncă nu există evaluări
- Timer/Counter Module: Prof. Kasim M. Al-AubidyDocument9 paginiTimer/Counter Module: Prof. Kasim M. Al-AubidyAnonymous IhmXvCHj3cÎncă nu există evaluări
- Tag Name Code Example Browser View: (Tip) Visit Our Site (Tip)Document7 paginiTag Name Code Example Browser View: (Tip) Visit Our Site (Tip)Anonymous IhmXvCHj3cÎncă nu există evaluări
- Angular PaginationDocument8 paginiAngular PaginationAnonymous IhmXvCHj3cÎncă nu există evaluări
- Cases For FinalsDocument170 paginiCases For FinalsAnonymous IhmXvCHj3cÎncă nu există evaluări
- December Case DigestDocument12 paginiDecember Case DigestAnonymous IhmXvCHj3cÎncă nu există evaluări
- ELS 07 Mei 2022Document14 paginiELS 07 Mei 2022Uzan Fauzan AccretiaÎncă nu există evaluări
- StructureDocument51 paginiStructureGurjarPushpaÎncă nu există evaluări
- Apple 820-2301Document86 paginiApple 820-2301u6k5lp l2y3z0Încă nu există evaluări
- LAN Switching and WAN NetworksDocument29 paginiLAN Switching and WAN NetworksMin LwinÎncă nu există evaluări
- FC P FF 01Document18 paginiFC P FF 01snehithÎncă nu există evaluări
- Jenkins Continuous Integration Cookbook PDFDocument88 paginiJenkins Continuous Integration Cookbook PDFbrandnewindianÎncă nu există evaluări
- Tạo Thư Viện Mới Trong MiKroCDocument1 paginăTạo Thư Viện Mới Trong MiKroCDanh_IS4Încă nu există evaluări
- Isc N-Channel MOSFET Transistor: IRF3205 IIRF3205Document2 paginiIsc N-Channel MOSFET Transistor: IRF3205 IIRF3205diegooliveiraEEÎncă nu există evaluări
- Network Architecture and Security For Avionics SystemsDocument11 paginiNetwork Architecture and Security For Avionics SystemsEnnajjarPRoÎncă nu există evaluări
- Data Sheet: TDA1510AQDocument12 paginiData Sheet: TDA1510AQGerardo PonceÎncă nu există evaluări
- Marker InterfaceDocument6 paginiMarker InterfacedhirajÎncă nu există evaluări
- MONT70 Series Elevator Integrated Controller User Manual - Hpmont - V1.1Document279 paginiMONT70 Series Elevator Integrated Controller User Manual - Hpmont - V1.1Eduar Andrey Martinez100% (4)
- RSP 2014 Access Control CatalogDocument65 paginiRSP 2014 Access Control CatalogAlfred PskÎncă nu există evaluări
- BEE Experiment 2Document3 paginiBEE Experiment 2MD ZunedÎncă nu există evaluări
- Material Master Report OriginalDocument13 paginiMaterial Master Report OriginalSanjay ParabÎncă nu există evaluări
- Reclosers: Form 6 Triple-Single Microprocessor-Based Rack Mount Recloser Control Installation and Operation InstructionsDocument40 paginiReclosers: Form 6 Triple-Single Microprocessor-Based Rack Mount Recloser Control Installation and Operation InstructionsJames RodasÎncă nu există evaluări
- The Most Versatile 2 Channel Optical Coagulometer at Your HandDocument2 paginiThe Most Versatile 2 Channel Optical Coagulometer at Your HandOo Kenx OoÎncă nu există evaluări
- 61863ev4 PDFDocument506 pagini61863ev4 PDFAntonio LucasÎncă nu există evaluări
- Semiconductor Main MemoryDocument15 paginiSemiconductor Main MemoryBereket TarikuÎncă nu există evaluări
- Innoswitch-Ep Family Datasheet PDFDocument34 paginiInnoswitch-Ep Family Datasheet PDFanand shekhawatÎncă nu există evaluări
- Intro To JavascriptDocument33 paginiIntro To JavascriptJason MagsinoÎncă nu există evaluări
- Data Extraction From Images Through OCR-IJRASETDocument5 paginiData Extraction From Images Through OCR-IJRASETIJRASETPublicationsÎncă nu există evaluări
- Ofm 11g Arch MNGMT Chapter 3 411767Document41 paginiOfm 11g Arch MNGMT Chapter 3 411767singhskÎncă nu există evaluări
- (+) Why Are Termination Networks in CAN Transceivers So Important - Industrial - Technical Articles - TI E2E Support ForumsDocument6 pagini(+) Why Are Termination Networks in CAN Transceivers So Important - Industrial - Technical Articles - TI E2E Support ForumsEdmundo FrazãoÎncă nu există evaluări
- Lab No. 02 Registers, Memory Segmentaion and Buffers in 80X86 Emulator Assembly LanguageDocument12 paginiLab No. 02 Registers, Memory Segmentaion and Buffers in 80X86 Emulator Assembly LanguageXrein MarkÎncă nu există evaluări
- Midterm Exam - Attempt Review CS6303Document7 paginiMidterm Exam - Attempt Review CS6303Ton LazaroÎncă nu există evaluări
- READ ME R201 Firmware UpgradeDocument4 paginiREAD ME R201 Firmware UpgradeMaratou MariaÎncă nu există evaluări
- C# Orientation Estimation Application Project Document and User ManualDocument7 paginiC# Orientation Estimation Application Project Document and User ManualLalo AngelÎncă nu există evaluări
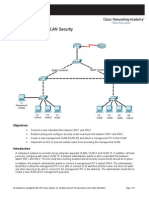
- En Security Chp6 PTActB L2-VLAN-Security StudentDocument3 paginiEn Security Chp6 PTActB L2-VLAN-Security Studentluis alexisÎncă nu există evaluări
- Implementing A Troubleshooting MethodologyDocument50 paginiImplementing A Troubleshooting MethodologyTaha KhanÎncă nu există evaluări