S-ar putea să vă placă și
- Códigos Prácticas ARDUINODocument5 paginiCódigos Prácticas ARDUINODaríoRodríguezBarriadaÎncă nu există evaluări
- Arduino Workshop Code HandoutDocument4 paginiArduino Workshop Code HandoutshanreiÎncă nu există evaluări
- Servo and Pushbutton CodeDocument1 paginăServo and Pushbutton Codekarim94Încă nu există evaluări
- Arduino LED ProjektDocument3 paginiArduino LED ProjektstarinandorÎncă nu există evaluări
- Tugas Mikrokontroler Dan Mikroprosesor Bobi Ardiansyah 145060301111055Document7 paginiTugas Mikrokontroler Dan Mikroprosesor Bobi Ardiansyah 145060301111055Rosihan Arby HarahapÎncă nu există evaluări
- Functions 1Document255 paginiFunctions 1kalvinnunagÎncă nu există evaluări
- Functions v3Document171 paginiFunctions v3Jerald MercadoÎncă nu există evaluări
- Parcial Electiva IIIDocument6 paginiParcial Electiva IIIWILLIAM ALEXANDER ROJAS GOMEZÎncă nu există evaluări
- Arduino Board Led Program InputDocument3 paginiArduino Board Led Program Inputkangirene9705Încă nu există evaluări
- Arduino For BeginnersDocument29 paginiArduino For BeginnersDavid HayaÎncă nu există evaluări
- Arduinos DianaDocument8 paginiArduinos DianaJulio DanielÎncă nu există evaluări
- Answers All Activities Cdi Grade 12 General & AdvanceDocument23 paginiAnswers All Activities Cdi Grade 12 General & Advancemahmoud albiakÎncă nu există evaluări
- Include Const Int Const Int Int Int IntDocument2 paginiInclude Const Int Const Int Int Int IntSHANMUGAPRIYA VASUDEVANÎncă nu există evaluări
- Jobsheet 6 - TI2B - 07 - Dwi Suci AmliapdfDocument26 paginiJobsheet 6 - TI2B - 07 - Dwi Suci AmliapdfDwi SuciÎncă nu există evaluări
- Arduino CodeDocument1 paginăArduino CodeSachin GuptaÎncă nu există evaluări
- UltrasonicDocument2 paginiUltrasonicعادل هيكلÎncă nu există evaluări
- IOT102 - Lab 1 - Lab5Document36 paginiIOT102 - Lab 1 - Lab5MLÎncă nu există evaluări
- Control NEMA Amb JoystickDocument3 paginiControl NEMA Amb JoystickSérgio PortuÎncă nu există evaluări
- All CodesDocument28 paginiAll CodeskarrarÎncă nu există evaluări
- Annexe: Programme Du MicrocontrôleurDocument3 paginiAnnexe: Programme Du MicrocontrôleurSoufianeBattalÎncă nu există evaluări
- Arduino For BeginnersDocument30 paginiArduino For BeginnersainseenÎncă nu există evaluări
- MP 2,3,4Document5 paginiMP 2,3,4tj millarÎncă nu există evaluări
- Arduino ExamplesDocument16 paginiArduino ExamplesKapila WijayaratneÎncă nu există evaluări
- 4 PRAKTEK Rev 3agustus17Document7 pagini4 PRAKTEK Rev 3agustus17Charles RobiansyahÎncă nu există evaluări
- Ec5c - Sheilla Frasisca - Tugas Arduino ProgrammingDocument10 paginiEc5c - Sheilla Frasisca - Tugas Arduino Programmingsheilla frasiscaÎncă nu există evaluări
- Job - 1 - Percobaan Dasar Input - Output Menggunakan Led Dan MicroswitchDocument5 paginiJob - 1 - Percobaan Dasar Input - Output Menggunakan Led Dan MicroswitchIkomang PartasanjayaputraÎncă nu există evaluări
- Workshop 1Document4 paginiWorkshop 1Le Tai Nhan (FGW DN)Încă nu există evaluări
- Learning ManualDocument11 paginiLearning ManualFelipe CisnerosÎncă nu există evaluări
- PID Control MAX6675 Thermocouple Arduino Schematic With Rotary EncoderDocument13 paginiPID Control MAX6675 Thermocouple Arduino Schematic With Rotary EncoderStewin Perez100% (1)
- Fis Lab ExamDocument17 paginiFis Lab Exambalajirayli1203Încă nu există evaluări
- SpeedControl InoDocument3 paginiSpeedControl InoOuail MakhebiÎncă nu există evaluări
- Ecen90 Robot Arle HernandezDocument12 paginiEcen90 Robot Arle HernandezCenon Lumabad IIIÎncă nu există evaluări
- ROBOTICS Lab ManualDocument7 paginiROBOTICS Lab Manualparidhi kaushikÎncă nu există evaluări
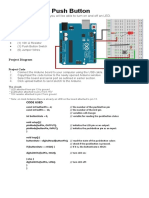
- PROJECT 3 - Push Button: Using A Push Button Switch, You Will Be Able To Turn On and Off An LED.Document1 paginăPROJECT 3 - Push Button: Using A Push Button Switch, You Will Be Able To Turn On and Off An LED.Vence Arevalo EncarnacionÎncă nu există evaluări
- Práctica 1 Con ArduinoDocument11 paginiPráctica 1 Con ArduinoJose Ricardo Clará GuevaraÎncă nu există evaluări
- ArduinoDocument4 paginiArduinoBreixo Gomez BarreraÎncă nu există evaluări
- Completed For Upload Onto Lathe ModuleDocument4 paginiCompleted For Upload Onto Lathe ModuleKurdlost SulyÎncă nu există evaluări
- Lab Exercise #1 - Getting Started: Dr. Timber Yuen Rev 0Document9 paginiLab Exercise #1 - Getting Started: Dr. Timber Yuen Rev 0Pae TankÎncă nu există evaluări
- Arduino ExampleDocument25 paginiArduino ExampleUYeMin HtikeÎncă nu există evaluări
- Led RGB StripDocument25 paginiLed RGB StripKOKO CARDENASÎncă nu există evaluări
- Assignment - 02: Experiment: 11Document21 paginiAssignment - 02: Experiment: 11ParamShahÎncă nu există evaluări
- Arduino Based Motor Driver: Nuudel@must - Edu.mnDocument25 paginiArduino Based Motor Driver: Nuudel@must - Edu.mnMyagmarjav NuudelÎncă nu există evaluări
- Master of Computer Application: 2nd Year, Semester-3Document8 paginiMaster of Computer Application: 2nd Year, Semester-309Samrat Bikram ShahÎncă nu există evaluări
- Скетч от неизвестногоDocument3 paginiСкетч от неизвестногоLaserskayaÎncă nu există evaluări
- IOT IntroductionDocument23 paginiIOT IntroductionMadhuÎncă nu există evaluări
- Interface Digital and Analog I/O Devices (Arduino Interfacing)Document29 paginiInterface Digital and Analog I/O Devices (Arduino Interfacing)Raggy TannaÎncă nu există evaluări
- Lab 2Document7 paginiLab 2Md AssadÎncă nu există evaluări
- Arduino Workshoop LoeDocument8 paginiArduino Workshoop Loetalha.k.rajpootÎncă nu există evaluări
- Notes Arduino NanoDocument10 paginiNotes Arduino NanoManfredHÎncă nu există evaluări
- Arduino Starter KitDocument15 paginiArduino Starter Kitelektric2007Încă nu există evaluări
- Motor Controlled by MPG at Best Rev No Display VersionDocument2 paginiMotor Controlled by MPG at Best Rev No Display VersionKurdlost SulyÎncă nu există evaluări
- Controler PDFDocument15 paginiControler PDFKhoiril HudaÎncă nu există evaluări
- The Ultrasonic SensorDocument14 paginiThe Ultrasonic SensorAdalberto Sharpley100% (1)
- Arduino Control Car V2 byDocument4 paginiArduino Control Car V2 byMikaela E Ramírez HerreraÎncă nu există evaluări
- Learn Arduino With TinkerCad - Day 2 PDFDocument21 paginiLearn Arduino With TinkerCad - Day 2 PDFS.M. Fazla RabbiÎncă nu există evaluări
- Lab06 - Smart Home Automation Using SensorsDocument14 paginiLab06 - Smart Home Automation Using SensorsChâu Trần100% (1)
- Arduino Experiments Part1Document4 paginiArduino Experiments Part1Gopinath c.yÎncă nu există evaluări
- Documento Sin TítuloDocument2 paginiDocumento Sin TítuloSantiago Maza Hern�ndezÎncă nu există evaluări
- Microcontrolleurs: Marin IulianaDocument8 paginiMicrocontrolleurs: Marin IulianaCoop ZkuberveitÎncă nu există evaluări
- Projects With Microcontrollers And PICCDe la EverandProjects With Microcontrollers And PICCEvaluare: 5 din 5 stele5/5 (1)
- CIVE2304 C1-1 Hydrological CycleDocument54 paginiCIVE2304 C1-1 Hydrological CyclenaserÎncă nu există evaluări
- Rfis On Formliners, Cover, and EmbedmentsDocument36 paginiRfis On Formliners, Cover, and Embedmentsali tahaÎncă nu există evaluări
- SchedulingDocument47 paginiSchedulingKonark PatelÎncă nu există evaluări
- High Intermediate 2 Workbook AnswerDocument23 paginiHigh Intermediate 2 Workbook AnswernikwÎncă nu există evaluări
- ZyLAB EDiscovery 3.11 What's New ManualDocument32 paginiZyLAB EDiscovery 3.11 What's New ManualyawahabÎncă nu există evaluări
- Infor Mashup DesignerDocument95 paginiInfor Mashup DesignerBalayogesh Alagesan100% (1)
- 3114 Entrance-Door-Sensor 10 18 18Document5 pagini3114 Entrance-Door-Sensor 10 18 18Hamilton Amilcar MirandaÎncă nu există evaluări
- D2E133AM4701 Operating Instruction UsDocument9 paginiD2E133AM4701 Operating Instruction UsMohamed AlkharashyÎncă nu există evaluări
- Jurnal KORELASI ANTARA STATUS GIZI IBU MENYUSUI DENGAN KECUKUPAN ASIDocument9 paginiJurnal KORELASI ANTARA STATUS GIZI IBU MENYUSUI DENGAN KECUKUPAN ASIMarsaidÎncă nu există evaluări
- EQUIP9-Operations-Use Case ChallengeDocument6 paginiEQUIP9-Operations-Use Case ChallengeTushar ChaudhariÎncă nu există evaluări
- Promoting Services and Educating CustomersDocument28 paginiPromoting Services and Educating Customershassan mehmoodÎncă nu există evaluări
- Unit 7 - Evolution and Classification: Regents BiologyDocument24 paginiUnit 7 - Evolution and Classification: Regents BiologyTalijah JamesÎncă nu există evaluări
- A Meta Analysis of The Relative Contribution of Leadership Styles To Followers Mental HealthDocument18 paginiA Meta Analysis of The Relative Contribution of Leadership Styles To Followers Mental HealthOnii ChanÎncă nu există evaluări
- Manual de Utilizare HUMAX DIGI TV RDSDocument116 paginiManual de Utilizare HUMAX DIGI TV RDSenamicul50Încă nu există evaluări
- Digital Signatures: Homework 6Document10 paginiDigital Signatures: Homework 6leishÎncă nu există evaluări
- INDUSTRIAL PHD POSITION - Sensor Fusion Enabled Indoor PositioningDocument8 paginiINDUSTRIAL PHD POSITION - Sensor Fusion Enabled Indoor Positioningzeeshan ahmedÎncă nu există evaluări
- Turbine Flowmeters-Commonly Asked Questions and Answers: For Chemical Composition Information.)Document8 paginiTurbine Flowmeters-Commonly Asked Questions and Answers: For Chemical Composition Information.)Alexander KlmÎncă nu există evaluări
- Research in International Business and Finance: Huizheng Liu, Zhe Zong, Kate Hynes, Karolien de Bruyne TDocument13 paginiResearch in International Business and Finance: Huizheng Liu, Zhe Zong, Kate Hynes, Karolien de Bruyne TDessy ParamitaÎncă nu există evaluări
- HAI ROBOTICS Introduction ENV2022.0829 MarketingDocument40 paginiHAI ROBOTICS Introduction ENV2022.0829 MarketingKit WooÎncă nu există evaluări
- Mufti ReligionMilitancy WebDocument0 paginiMufti ReligionMilitancy WebAyaz Ahmed KhanÎncă nu există evaluări
- Damage To Bottom Ash Handling SysDocument6 paginiDamage To Bottom Ash Handling SyssanjeevchhabraÎncă nu există evaluări
- Case Studies InterviewDocument7 paginiCase Studies Interviewxuyq_richard8867100% (2)
- Zimbabwe - Youth and Tourism Enhancement Project - National Tourism Masterplan - EOIDocument1 paginăZimbabwe - Youth and Tourism Enhancement Project - National Tourism Masterplan - EOIcarlton.mamire.gtÎncă nu există evaluări
- Color Coding Chart - AHGDocument3 paginiColor Coding Chart - AHGahmedÎncă nu există evaluări
- Solitax SCDocument8 paginiSolitax SCprannoyÎncă nu există evaluări
- Fractional Differential Equations: Bangti JinDocument377 paginiFractional Differential Equations: Bangti JinOmar GuzmanÎncă nu există evaluări
- Tourism and GastronomyDocument245 paginiTourism and GastronomySakurel ZenzeiÎncă nu există evaluări
- Awo, Part I by Awo Fa'lokun FatunmbiDocument7 paginiAwo, Part I by Awo Fa'lokun FatunmbiodeÎncă nu există evaluări
- Preboard Practice PDFDocument25 paginiPreboard Practice PDFGracielle NebresÎncă nu există evaluări
- 4.1.1.6 Packet Tracer - Explore The Smart Home - ILM - 51800835Document4 pagini4.1.1.6 Packet Tracer - Explore The Smart Home - ILM - 51800835Viet Quoc100% (1)