S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Manufacturing StrategyDocument31 paginiManufacturing Strategyrajendra1pansare0% (1)
- Food and Beverage Department Job DescriptionDocument21 paginiFood and Beverage Department Job DescriptionShergie Rivera71% (7)
- Presentation Report On Customer Relationship Management On SubwayDocument16 paginiPresentation Report On Customer Relationship Management On SubwayVikrant KumarÎncă nu există evaluări
- Oracle FND User APIsDocument4 paginiOracle FND User APIsBick KyyÎncă nu există evaluări
- BluetoothDocument28 paginiBluetoothMilind GoratelaÎncă nu există evaluări
- TLE - IA - Carpentry Grades 7-10 CG 04.06.2014Document14 paginiTLE - IA - Carpentry Grades 7-10 CG 04.06.2014RickyJeciel100% (2)
- IEC Blank ProformaDocument10 paginiIEC Blank ProformaVanshika JainÎncă nu există evaluări
- Lockbox Br100 v1.22Document36 paginiLockbox Br100 v1.22Manoj BhogaleÎncă nu există evaluări
- Basic DfwmacDocument6 paginiBasic DfwmacDinesh Kumar PÎncă nu există evaluări
- Doas - MotorcycleDocument2 paginiDoas - MotorcycleNaojÎncă nu există evaluări
- Separation PayDocument3 paginiSeparation PayMalen Roque Saludes100% (1)
- As 60068.5.2-2003 Environmental Testing - Guide To Drafting of Test Methods - Terms and DefinitionsDocument8 paginiAs 60068.5.2-2003 Environmental Testing - Guide To Drafting of Test Methods - Terms and DefinitionsSAI Global - APACÎncă nu există evaluări
- Topic 4: Mental AccountingDocument13 paginiTopic 4: Mental AccountingHimanshi AryaÎncă nu există evaluări
- Unit 2Document97 paginiUnit 2MOHAN RuttalaÎncă nu există evaluări
- Basics: Define The Task of Having Braking System in A VehicleDocument27 paginiBasics: Define The Task of Having Braking System in A VehiclearupÎncă nu există evaluări
- Wiley Chapter 11 Depreciation Impairments and DepletionDocument43 paginiWiley Chapter 11 Depreciation Impairments and Depletion靳雪娇Încă nu există evaluări
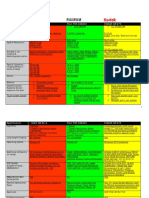
- Agfa CR 85-X: Specification Fuji FCR Xg5000 Kodak CR 975Document3 paginiAgfa CR 85-X: Specification Fuji FCR Xg5000 Kodak CR 975Youness Ben TibariÎncă nu există evaluări
- Shubham Tonk - ResumeDocument2 paginiShubham Tonk - ResumerajivÎncă nu există evaluări
- 4 Bar LinkDocument4 pagini4 Bar LinkConstance Lynn'da GÎncă nu există evaluări
- Banjara EmbroideryDocument34 paginiBanjara EmbroideryKriti Rama ManiÎncă nu există evaluări
- Asphalt Plant Technical SpecificationsDocument5 paginiAsphalt Plant Technical SpecificationsEljoy AgsamosamÎncă nu există evaluări
- Building and Other Construction Workers Act 1996Document151 paginiBuilding and Other Construction Workers Act 1996Rajesh KodavatiÎncă nu există evaluări
- MDOF (Multi Degre of FreedomDocument173 paginiMDOF (Multi Degre of FreedomRicky Ariyanto100% (1)
- Agricultural Economics 1916Document932 paginiAgricultural Economics 1916OceanÎncă nu există evaluări
- Course Specifications: Fire Investigation and Failure Analysis (E901313)Document2 paginiCourse Specifications: Fire Investigation and Failure Analysis (E901313)danateoÎncă nu există evaluări
- GL 186400 Case DigestDocument2 paginiGL 186400 Case DigestRuss TuazonÎncă nu există evaluări
- Epidemiologi DialipidemiaDocument5 paginiEpidemiologi DialipidemianurfitrizuhurhurÎncă nu există evaluări
- Proceedings of SpieDocument7 paginiProceedings of SpieNintoku82Încă nu există evaluări
- Cs8792 Cns Unit 1Document35 paginiCs8792 Cns Unit 1Manikandan JÎncă nu există evaluări
- Sky ChemicalsDocument1 paginăSky ChemicalsfishÎncă nu există evaluări