S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (890)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Activities For Teens and AdultsDocument130 paginiActivities For Teens and AdultsDonata Marletta100% (12)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Four Organizational Culture TypesDocument4 paginiFour Organizational Culture TypesALTERINDONESIA100% (1)
- Wiki SpeedDocument5 paginiWiki Speedprashanthfeb90100% (1)
- Acupuncture For PhysiotherapistDocument277 paginiAcupuncture For PhysiotherapistLuis Gomes100% (1)
- Engineering 45: CrystallographyDocument39 paginiEngineering 45: CrystallographySaeed AnsariÎncă nu există evaluări
- (Carmen-Gabriela Stefanita) From Bulk To Nano The (BookFi)Document188 pagini(Carmen-Gabriela Stefanita) From Bulk To Nano The (BookFi)Saeed AnsariÎncă nu există evaluări
- ENDocument1 paginăENSaeed AnsariÎncă nu există evaluări
- A Comparative GrammarDocument503 paginiA Comparative GrammarXweuis Hekuos KweÎncă nu există evaluări
- Quarter 1 Revision SheetsDocument7 paginiQuarter 1 Revision Sheetsghada kamalÎncă nu există evaluări
- Beno K Pradekso - Solusi247 - In40aiDocument36 paginiBeno K Pradekso - Solusi247 - In40aiMuhammad HattaÎncă nu există evaluări
- Osmotic Power Potential Questions and AnswersDocument12 paginiOsmotic Power Potential Questions and AnswersAishwar RavichandranÎncă nu există evaluări
- Fast Arm Simulations for RehabilitationDocument33 paginiFast Arm Simulations for RehabilitationGyrl DyamonndÎncă nu există evaluări
- DBMS Lab - Practical FileDocument21 paginiDBMS Lab - Practical Fileakhileshprasad1Încă nu există evaluări
- L o N G e V I T y NotesDocument24 paginiL o N G e V I T y NotesRajeswara Rao NidasanametlaÎncă nu există evaluări
- Persuasive Writing G7Document18 paginiPersuasive Writing G7Shorouk KaramÎncă nu există evaluări
- Chapter 1 - PolymersDocument94 paginiChapter 1 - Polymersa2hasijaÎncă nu există evaluări
- Aneka Cloud IntroductionDocument36 paginiAneka Cloud IntroductionPradeep Kumar Reddy ReddyÎncă nu există evaluări
- ETHOSUXIMIDEDocument14 paginiETHOSUXIMIDEAfrizal MahadiÎncă nu există evaluări
- 1.1.3 Project Execution PlanDocument7 pagini1.1.3 Project Execution PlanlisahunÎncă nu există evaluări
- Housekeeping & Etiquette BibliographyDocument92 paginiHousekeeping & Etiquette BibliographyDouglas CavalheiroÎncă nu există evaluări
- 1st Bay Area Mathematical Olympiad February 23, 1999Document2 pagini1st Bay Area Mathematical Olympiad February 23, 1999Karn KumarÎncă nu există evaluări
- Milankovitch Cycles - Earth ClimateDocument11 paginiMilankovitch Cycles - Earth ClimateJohn MarkakisÎncă nu există evaluări
- MPF1533 SEM II 2014/2015 Organizational Theory and Educational Administration LecturerDocument295 paginiMPF1533 SEM II 2014/2015 Organizational Theory and Educational Administration LecturerazuanÎncă nu există evaluări
- Seance 1 Introduction To DystopiaDocument32 paginiSeance 1 Introduction To DystopiaHanane AmadouÎncă nu există evaluări
- Action Plan NEAP MaglonzoDocument4 paginiAction Plan NEAP MaglonzoAlvin EspirituÎncă nu există evaluări
- Food Chemistry: Analytical MethodsDocument7 paginiFood Chemistry: Analytical Methodswildan ariefÎncă nu există evaluări
- Introduction To Hse Benchmarking: Symposium Series No. 156 Hazards Xxii # 2011 IchemeDocument8 paginiIntroduction To Hse Benchmarking: Symposium Series No. 156 Hazards Xxii # 2011 IchemeLegend AnbuÎncă nu există evaluări
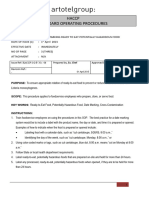
- Standard Operation Procedures.06 - Potentially Hazardous Foods - Date MarkingDocument3 paginiStandard Operation Procedures.06 - Potentially Hazardous Foods - Date MarkingJumadi SuburÎncă nu există evaluări
- Chapter 3Document62 paginiChapter 3Matthew AloÎncă nu există evaluări
- English Language 4EA0/KEAO Paper 1 exemplarsDocument2 paginiEnglish Language 4EA0/KEAO Paper 1 exemplarsBooksÎncă nu există evaluări
- Payment For Building PermitDocument1 paginăPayment For Building PermitSterben ShouchiÎncă nu există evaluări
- Annals of Medicine and Surgery: Bliss J. ChangDocument2 paginiAnnals of Medicine and Surgery: Bliss J. ChangroromutiaraÎncă nu există evaluări
- 3rd BeatitudeDocument18 pagini3rd BeatitudeDonna AÎncă nu există evaluări
- Personality TypesDocument20 paginiPersonality TypesGURNEESHÎncă nu există evaluări